


¿Qué está frenando la integración de robots industriales?
La integración de robots industriales es un proceso altamente especializado, muy creativo y astuto, mientras que las personas que lo practican a menudo se atribuyen el mérito de la idea misma del ingenio y el ingenio humanos. En muchos sentidos, los integradores de robótica representan un cuerpo de arquitectos de soluciones altamente especializados y altamente capaces que ayudan a los fabricantes a impulsar su productividad.
Desafortunadamente, ha habido algunas cosas que mantienen el alcance y alcance de la integración de robots industriales de nuevo. Además, son los verdaderos artesanos, los integradores de robótica en los que confiamos, los que más sufren por ello. Esto no se debe solo a que es difícil encontrar personas con las habilidades adecuadas para la integración robótica, sino también a que el trabajo en sí puede ser exigente, tedioso y tener una rentabilidad limitada en muchos escenarios de fabricación.
¿Qué tiene la robótica que los está frenando? Bueno, por un lado, la programación es un proceso tan exigente que los esfuerzos para hacerlo más fácil no han tenido el impacto material que deberían para muchos integradores. Incluso donde la programación es más fácil, los robots de hoy no están diseñados para adaptarse a una gran variedad de partes o entornos no estructurados, lo que los mantiene fuera de muchas fábricas. La visión 3D, la fusión de sensores y una variedad de tecnologías prometen hacer que los robots sean más autónomos, pero las habilidades y el software adecuados no han estado ahí para facilitar las cosas todavía.
Afortunadamente, las soluciones adecuadas pueden ayudar a los integradores de robots a abordar finalmente todos estos problemas a la vez. Cuando lo hagan, abrirán las puertas a una variedad de industrias, procesos y oportunidades de servicio que simplemente no habían sido posibles en el pasado.
Hacer que la programación sea más fácil no lo ha hecho lo suficientemente fácil
El concepto de robótica en sí mismo es, en relación con otras prácticas de la ingeniería moderna, todavía algo fronterizo con el territorio de la ciencia ficción. ¿Cómo se puede automatizar de forma fiable un proceso cien, mil o incluso un millón de veces sin el riesgo de avería, parada o deterioro catastrófico?
Los robots industriales proporcionados hoy, ya sean de FANUC, Kuka, ABB, Kawasaki, Universal Robots o proveedores más emergentes y especializados, en realidad cumplen comúnmente este tipo de estándares de rendimiento, donde, por supuesto, se respetan sus restricciones de proceso y requisitos de mantenimiento.
Los avances en materiales han hecho que los robots de cada uno de estos proveedores de alto perfil sean más livianos, más ágiles y más precisos más allá de lo que esperaríamos de los trabajadores humanos. Esto ha permitido que cada uno desarrolle diferentes jerks, capacidades de controlador y más.
En todos estos casos, se tomaron decisiones esenciales de desarrollo e ingeniería para lograr las características y los niveles necesarios de usabilidad. Si bien este proceso es laborioso, también crea una divergencia en las capacidades, la programación y la idoneidad de diferentes robots para diferentes operaciones. Los integradores de robots expertos saben cómo administrar modelos y trabajar en escenarios preferidos, pero cuando se trata de la escasez de habilidades y entornos para implementar, donde de otro modo podrían crecer y diversificar su negocio, esta combinación de requisitos de programación de robots puede parecer estar en el camino.

En esta brecha, algunos podrían pensar que un middleware unificador es la forma principal en la que cada tipo y función diferente de robot podría "armonizarse" para simplificar la planificación y programación de las operaciones del robot.
ROS (o, creativamente, “Robot Operating System”) fue lanzado en 2007 para lograr esto. ROS proporcionó al menos un sistema que fue útil para los académicos en el desarrollo y el intercambio de aplicaciones de robots. Desafortunadamente, esto finalmente no resolvió el problema que los integradores industriales necesitaban resolver:la capacidad de saltarse fundamentalmente muchas de las limitaciones que vienen con la planificación, programación y procesamiento en varias partes y restricciones espaciales. Todo esto podría, en cambio, permitirles incorporar, integrar y vender más robots en nuevos procesos e industrias.
La necesidad de ejecuciones de piezas limitadas o mínimas
En última instancia, un middleware de robot no acelera fundamentalmente la integración del robot porque el "bucle permanece abierto":con cada producto, proceso y programa que asume un robot, todos y cada uno de los pasos deben programarse, probarse y validarse en un conjunto de escenarios 100% predecible . En última instancia, esto significa que, sin importar cuán incremental o asistencial sea un escenario, tomará la misma cantidad de tiempo para prepararse que su proceso robótico más importante. Incluso si facilita la programación, un proceso que requiere una repetición constante, no es lo suficientemente fácil.
Si bien ciertos proveedores de robots industriales anuncian lenguajes y metodologías de programación más fáciles, incluido el mayor uso de HMI (interfaces hombre-máquina), cada proceso aún debe programarse manualmente hasta cierto punto. Ese programa, generado por un ser humano, debe ser validado. Esto significa que, en última instancia, solo se puede ahorrar una cantidad limitada de tiempo en el proceso de integración robótica.
Por ejemplo, existe una tendencia creciente entre los talleres de máquinas en el uso de robots con programación limitada en persona para un proceso repetible. Este proceso permitirá, por ejemplo, que una corrida de unos pocos cientos de piezas metálicas se automatice rápidamente con un grado decente de precisión, pero en última instancia aún requerirá una cantidad significativa de esfuerzo humano, supervisión y reelaboración.
Si bien se puede considerar que esto logra gran parte del "trabajo preliminar", solo agrega un grado limitado de productividad a un taller determinado y, además, presenta oportunidades limitadas para que los integradores de robots crezcan vendiendo servicios a nuevos entornos de clientes. Al mismo tiempo, no resuelve el problema del cambio de robot entre piezas o en entornos no estructurados, o simplemente aquellos que no implican un gran jigging.
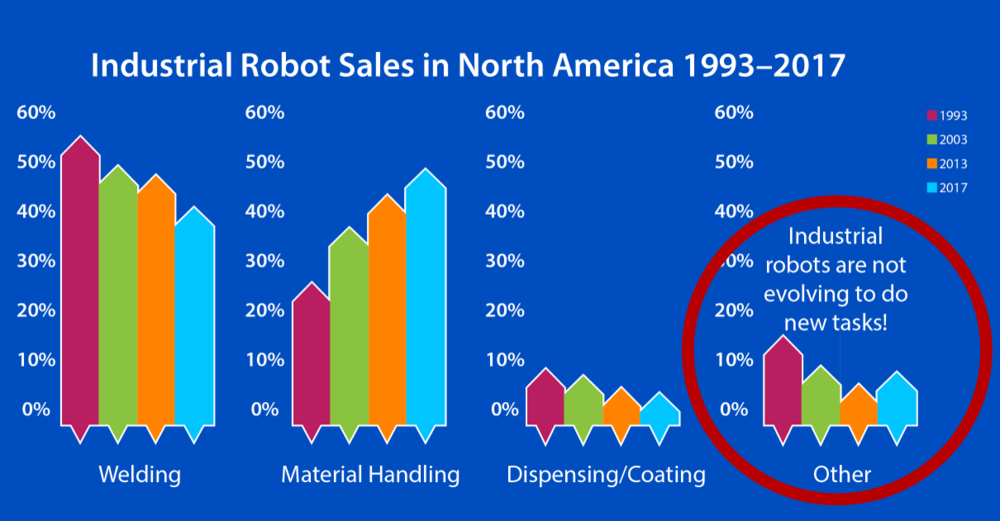
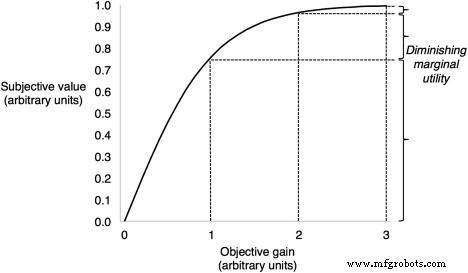
En última instancia, esto sigue siendo víctima de la ley de "Utilidad marginal decreciente". Para los fabricantes en masa, la utilidad marginal de los robots es relativamente alta. Para los talleres mecánicos, ahora es más alto de lo que solía ser, pero aún es demasiado bajo para ofrecer una base de clientes confiable para integradores de robótica. Para los fabricantes de alta mezcla, aquellos con miles de SKU y que constituyen la mayor parte de la industria manufacturera, la utilidad marginal de los robots es tan baja que pocos, si es que hay alguno, hacen uso regular de la robótica.
En estos casos, los robots necesitan la capacidad de responder realmente a piezas y entornos de la forma más cercana posible en "tiempo real". Los nuevos avances en la visión 3D brindan una oportunidad para que los integradores de robótica proporcionen a los robots estos sentidos y, en última instancia, superen sus desafíos de programación de una vez por todas, si, por supuesto, los robots pueden tener la capacidad de programarse por sí mismos.
Capacidades limitadas de detección y visión
Casi al mismo tiempo que ROS estaba en su infancia, se estaba desarrollando una forma completamente nueva de abordar la visión 3D. Sensor Fusion, desarrollado inicialmente para entornos virtuales 3D como lo que se logró con el sistema Xbox Kinect de Microsoft, permitió una representación relativamente precisa de objetos y entornos de una manera que una computadora podría entender.
Unos años más tarde, la fusión de sensores se integra en automóviles autónomos y robots móviles autónomos, al tiempo que encuentra aún más usos en los sistemas de realidad virtual que los dieron a luz. El concepto, en lugar de sensores puramente visuales, tiene sus raíces en el Sistema de posicionamiento global (GPS) al mismo tiempo que encuentra una tracción relativa en todo, desde el monitoreo de HVAC hasta los dispositivos médicos.
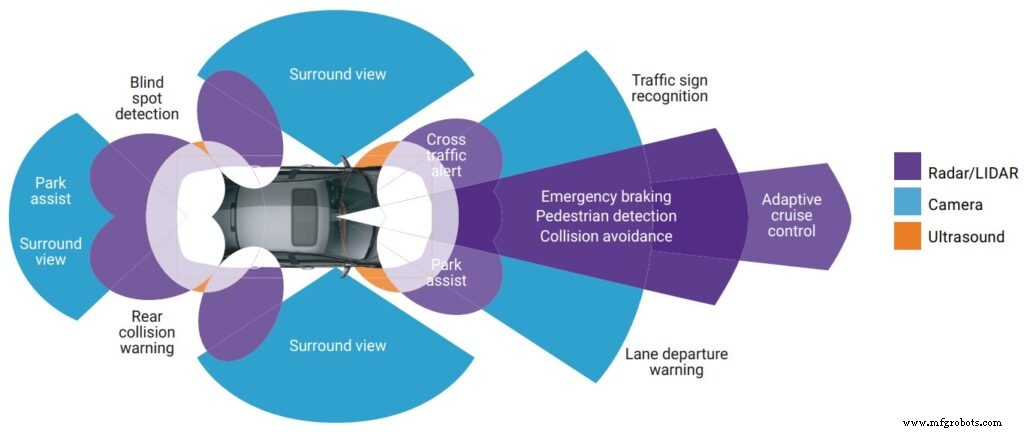
Sin embargo, para los fabricantes industriales, la fusión de sensores apenas está comenzando como una aplicación útil. Si bien muchos están montando la ola de la Industria 4.0 / IoT e intentan integrar sensores en más lugares para lograr un monitoreo remoto, casos de uso de procesamiento de bordes o mantenimiento predictivo, incorporar visión artificial y robótica es en realidad la mejor manera en que pueden tener algún tipo de capacidad de respuesta. sus robots en procesos industriales. Al brindarles a los robots la capacidad de identificar y procesar objetos en el espacio, pueden brindar la misma autonomía que viene con la tecnología de autos autónomos a los robots de su fábrica.
Algunas de estas aplicaciones existen en la actualidad, pero solo para escenarios altamente refinados o kits de desarrollo de sensores listos para usar que provienen de los principales fabricantes de robots industriales y equipos periféricos. Estos ofrecen un excelente punto de partida para integrar más robots en entornos de alta mezcla, pero se limitan principalmente a seleccionar casos de uso y no procesos de valor agregado, donde los cuellos de botella de producción son más comunes. En última instancia, hasta que un robot tenga la capacidad de generar un programa por sí mismo a partir de lo que ve, solo ofrecerá mejoras incrementales en entornos de alta mezcla.
Facilitar el paso a nuevas industrias
Como integrador de robótica, es posible que no tenga tiempo para generar nuevas soluciones que incorporen visión 3D, fusión de sensores o tipos nuevos y más elaborados de ofertas de alta mezcla. Muchos pueden estar bastante contentos con su negocio en la industria automotriz y similares. Muchos más pueden estar felices de ingresar lentamente a más talleres de máquinas y operaciones de alta mezcla donde el tamaño del lote es lo suficientemente grande como para justificar una solución robótica.
Sin embargo, para los integradores que buscan una forma de implementar más soluciones robóticas en industrias que aún no las han visto y no saben por dónde empezar, la tecnología Shape-to-Motion ™ de Omnirobotic puede ofrecer una forma. Esta tecnología VE, PLANIFICA y EJECUTA procesos de pulverización industrial identificando objetos de acuerdo con la forma, cualquiera que sea su posición en el espacio, utilizando visión 3D, luego utiliza inteligencia artificial y conocimientos de proceso para generar un movimiento de robot único para cada pieza que se procesa. Luego, puede ejecutar el proceso con un alto grado de refinamiento, calidad y mayor productividad al trabajar con controladores de movimiento de robots industriales existentes.
En última instancia, esta tecnología permite a los integradores de robótica manejar la implementación en escenarios de alta mezcla, ya sea aeroespacial, equipo pesado, muebles y electrodomésticos importantes. Estos son solo algunos, pero no todos, los escenarios en los que las aplicaciones de recubrimiento pueden beneficiarse de operaciones robóticas más precisas y mejoradas y, sin embargo, simplemente han tenido demasiados tipos de piezas para justificar el tiempo de programación requerido por cualquiera de las soluciones de programación manual actuales.
Omnirobotic proporciona tecnología de autoprogramación para robots que les permite ver, planificar y ejecutar procesos de acabado y pulverización industriales críticos. El equipo de Omnirobotic combina décadas de experiencia con nuevas capacidades de inteligencia artificial para proporcionar esto a través de algo llamado Tecnología Shape-to-Motion ™, que genera movimientos de robot únicos en tiempo real para cada pieza y requisito específico. Vea qué tipo de recuperación puede obtener aquí .
Robot industrial
- ¿Qué robots de pintura industrial funcionan mejor?
- Robot industrial
- Robots articulados:Guía del robot industrial más familiar
- Tipos de robots industriales y sus diferentes usos
- Las 12 aplicaciones y usos principales de robots industriales
- Mantenimiento preventivo para robots industriales
- 6 pasos para una integración exitosa de un robot industrial en su instalación
- Robots industriales en la industria automotriz
- Robótica industrial del siglo XXI
- Equipación de robots industriales para entornos de almacenamiento extremos
- Los 3 principales mitos sobre la integración robótica industrial