


Convierte tu coche RC en coche RC Bluetooth
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
| |
|
Acerca de este proyecto




Los coches RC son realmente divertidos de piratear y proporcionan un buen chasis a bajo precio para hacer robots, pero seleccionar uno para hacer es un dolor de cabeza con millones de tipos. Mi hermano pequeño tuvo su cumpleaños recientemente y quería regalarle algo realmente genial, terminé regalándole este auto rc. La piratería de coches RC también es fácil y difícil, debido a la forma diferente en que se fabrican los coches RC, no es una forma fácil y definida de piratear el coche, pero este truco es universal. También intentaré cubrir lo básico sobre todas las partes y la teoría detrás de cada módulo. Hemos utilizado el módulo pero te animamos a hacer nuestro circuito, excepto el pro mini.
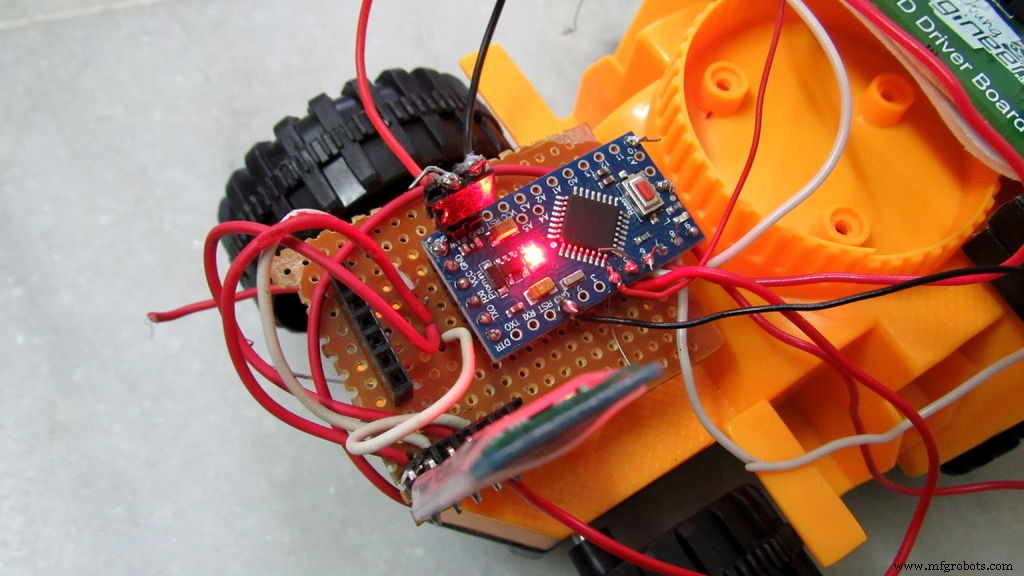
Me sentí realmente incómodo con promini porque era demasiado pequeño pero divertido.
Mira el video y asegúrate de suscribirte para los próximos videos
Paso 1:obtener el chasis correcto



Lista de piezas
- ProMini
- Módulo L293d
- hc-05
- Coche Rc
Conseguir el chasis correcto
Elegir el chasis es una cuestión de mecanismo de accionamiento, hay muchos mecanismos de accionamiento.
Hablemos de los dos mecanismos más populares.
Transmisión diferencial ¿Qué es la transmisión diferencial?
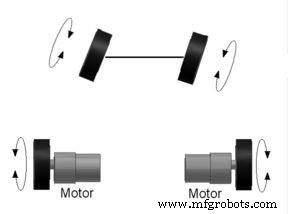
El término diferencial significa diferencia entre dos entidades, en el contexto de la robótica es solo la diferencia de velocidad entre dos motores. Basado en esta diferencia de velocidad, un robot se puede mover en cualquier dirección en un diseño 2D.
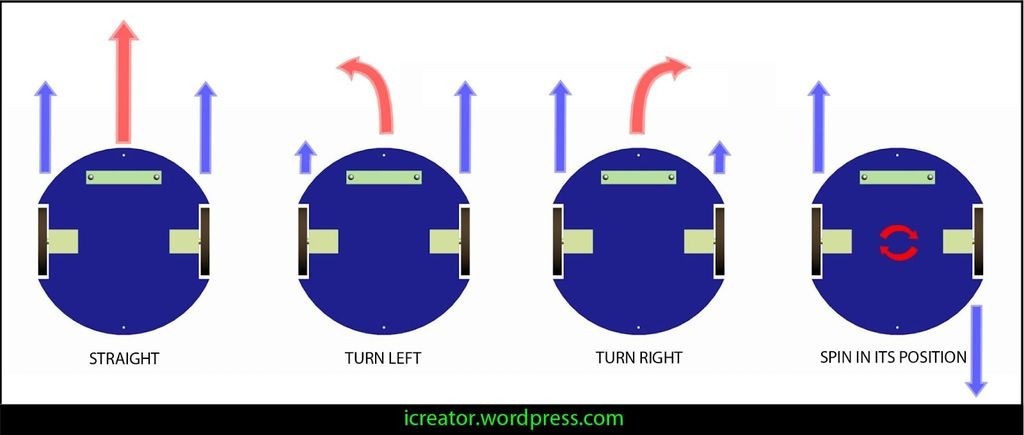
Cuando dos motores están conectados a ruedas en una línea, opuestos entre sí (al igual que un par de ruedas conectadas a un solo eje), la velocidad con la que gira cada motor determina la dirección del movimiento. Cuando ambas ruedas giran a la misma velocidad, la diferencia entre los motores es cero. Esto hace que el robot se mueva hacia adelante en línea recta. El robot puede moverse en dirección inversa si se invierte la dirección de rotación de ambos motores. Esto volverá a estar en línea recta si la diferencia de velocidad es cero. Ahora, cambiar la velocidad de cualquier motor dará como resultado un movimiento en una dirección que se aleja de la línea recta. Por ejemplo, reducir la velocidad del motor derecho dará como resultado una diferencia de velocidad y, por lo tanto, un cambio de dirección. La fuerza resultante es tal que el robot gira a la derecha. Este cambio de dirección se puede controlar al ángulo requerido reduciendo aún más la velocidad del motor. Más lento es el motor derecho, más agudo es el giro a la derecha. Esto es exactamente lo mismo para el giro a la izquierda.
Como conclusión, motor derecho más lento, giro a la derecha más cerrado. Motor izquierdo más lento Giro a la izquierda más pronunciado. A continuación se muestran algunos escenarios que explican el funcionamiento del mecanismo de accionamiento diferencial. M1 y M2 son motores que impulsan las ruedas a la izquierda y a la derecha respectivamente.
Conducir con dirección
¿Qué es la conducción de tipo Steer?
La unidad de tipo automóvil es la más común en el mundo real, pero no en el mundo de los robots. Se caracteriza por un par de ruedas motrices y un par de volantes independientes. La traslación y la rotación son independientes entre sí. Pero la traslación y la rotación están interrelacionadas, por lo que este sistema se enfrenta a un grave problema de planificación de trayectorias. Las cuatro ruedas son más eficientes en comparación con tres o dos ruedas. Las dos primeras de las cuatro ruedas se pueden utilizar para dirigir y las dos siguientes para conducir el robot. Equilibrar un robot de cuatro ruedas nunca es un problema. La mayoría de los automóviles que utilizamos a diario son de cuatro ruedas y el ejemplo es suficiente para demostrar su existencia y capacidades.
Desventajas de la conducción tipo coche :El mecanismo de giro debe controlarse con precisión. Una ligera inexactitud puede causar grandes errores de odometría. El sistema no es holonómico, por lo que la planificación de la ruta es extremadamente difícil e imprecisa. No hay actuadores direccionales directos
Por lo tanto, es mejor utilizar la unidad diferencial debido a su simplicidad y facilidad de uso.
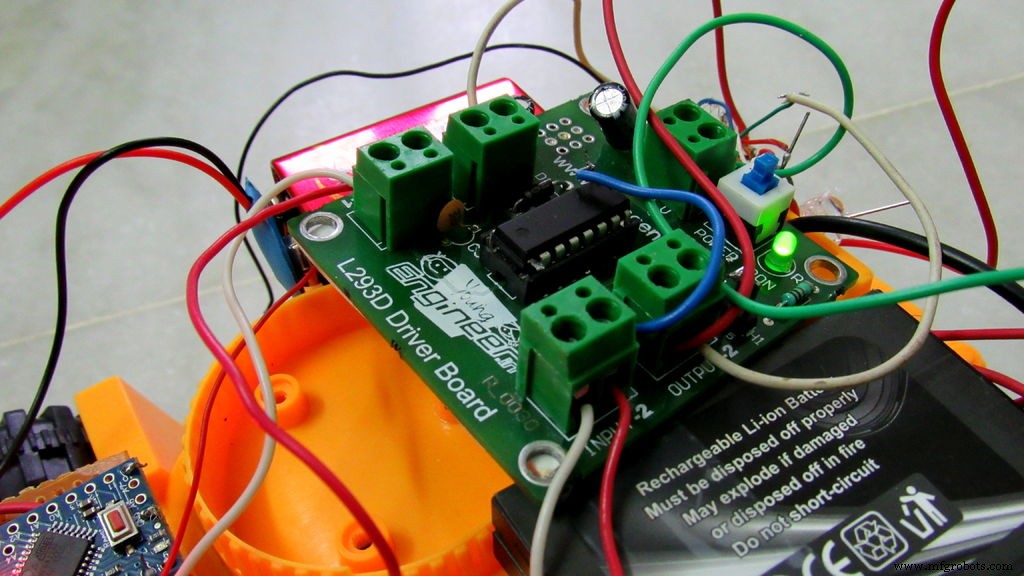
Paso 2:controlar los motores
Para controlar el motor, necesitamos algo llamado controlador de motor.
¿Qué es un controlador de motor?
Un controlador de motor es un pequeño amplificador de corriente; la función de los controladores de motor es tomar una señal de control de baja corriente y luego convertirla en una señal de corriente más alta que pueda impulsar un motor.
Hay muchos controladores de motor de los cuales estoy usando el módulo de controlador de motor l293d.
L293D es un circuito integrado de controlador de motor que se utiliza para impulsar motores de CC que giran en cualquier dirección. Es un IC de 16 pines que puede controlar un conjunto de dos motores de CC simultáneamente. El L293D usa 5 V para su propia energía y se necesita una fuente de energía externa para impulsar los motores, que pueden ser de hasta 36 V y consumir hasta 600 mA. El L293D funciona con el concepto de puente en H típico, un circuito que permite que el alto voltaje fluya en cualquier dirección. En un solo L293D IC hay dos circuitos de puente H que pueden hacer girar dos motores de CC de forma independiente.
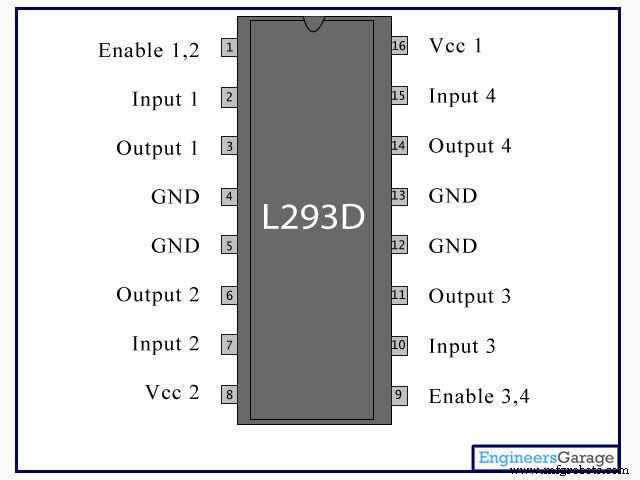
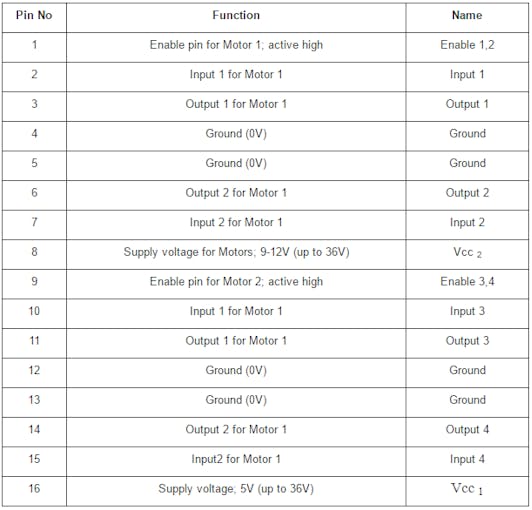
Descripción del pin de L293d
1 Habilitar pin para Motor 1; activo alto Habilitar 1,2 2 Entrada 1 para Motor 1 Entrada 1 3 Salida 1 para Motor 1 Salida 1 4 Tierra (0 V) Tierra 5 Tierra (0 V) Tierra 6 Salida 2 para Motor 1 Salida 2 7 Entrada 2 para Motor 1 Entrada 2 8 Tensión de alimentación para motores; 9-12 V (hasta 36 V) Vcc 2 9 Pin de habilitación para el motor 2; activo alto Habilitar 3,4 10 Entrada 1 para Motor 1 Entrada 3 11 Salida 1 para Motor 1 Salida 3 12 Tierra (0 V) Tierra 13 Tierra (0 V) Tierra 14 Salida 2 para Motor 1 Salida 4 15 Entrada2 para Motor 1 Entrada 4 16 Voltaje de suministro; 5V (hasta 36V) Vcc 1
Paso 3:Acerca de la aplicación


Hay muchas aplicaciones para controlar que hice con una. La lógica es muy simple, todo el botón envía un carácter cuando se presiona a través de Bluetooth y el arduino lo procesa.
Funciones de los personajes
X Estado nulo F Movimiento hacia adelante B Movimiento hacia atrás L Girar a la izquierda R Girar a la derecha
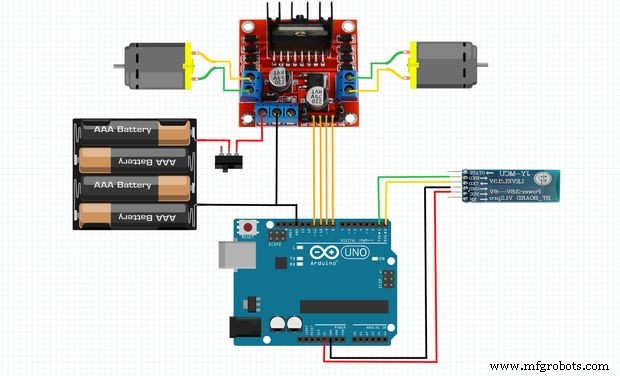
Paso 4:Conecta toda la pieza
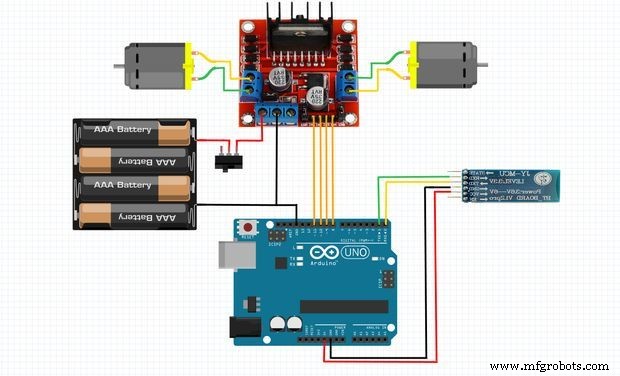

Las conexiones son simples
aquí está la conexión de la siguiente manera
El módulo Bluetooth
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
El conductor del motor
Controlador de motor Arduino pin 2 8 pin 7 7 pin 10 6 pin 4 9 pin 3 y 6 Motor 1 pin 11 y pin 14 Motor 2 pin 1 5v pin 9 5v
Paso 5:codificación


void setup () {Serial.begin (9600); pinMode (8, SALIDA); pinMode (7, SALIDA); pinMode (9, SALIDA); pinMode (6, SALIDA); pinMode (5, SALIDA); pinMode (4, SALIDA); digitalWrite (4, BAJO); digitalWrite (5, LOW);} // la función de bucle se ejecuta una y otra vez forevervoid loop () {var =Serial.read (); if (var =='F') {digitalWrite (6, LOW); digitalWrite ( 7, HIGH); digitalWrite (8, LOW); digitalWrite (9, HIGH);} if (var =='H') {digitalWrite (frled1, HIGH);} if (var =='B') {analogWrite ( speeden, 150); escritura digital (6, ALTA); escritura digital (7, BAJA); escritura digital (8, ALTA); escritura digital (9, BAJA); digitalWrite (bcled1, HIGH);} if (var =='X') {digitalWrite (9, LOW); digitalWrite (8, LOW); digitalWrite (7, LOW); digitalWrite (6, LOW); digitalWrite (frled1, LOW); digitalWrite (bcled1, LOW);} if (var =='L') {digitalWrite (6, LOW); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW);} if (var =='R') {escritura digital (6, ALTA); escritura digital (7, BAJA); escritura digital (8, BAJA); escritura digital (9, BAJA);;}} Espero que disfrutes haciendo el proyecto como yo lo he hecho. Estoy publicando algunos proyectos más interesantes pronto, así que sígueme para obtener todas las actualizaciones. También me gusta mi página https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Código
- Fragmento de código n. ° 1
Fragmento de código n. ° 1 Texto sin formato
void setup () {Serial.begin (9600); pinMode (8, SALIDA); pinMode (7, SALIDA); pinMode (9, SALIDA); pinMode (6, SALIDA); pinMode (5, SALIDA); pinMode (4, SALIDA); digitalWrite (4, BAJO); digitalWrite (5, LOW);} // la función de bucle se ejecuta una y otra vez forevervoid loop () {var =Serial.read (); if (var =='F') {escritura digital (6, BAJA); escritura digital (7, ALTA); escritura digital (8, BAJA); escritura digital (9, ALTA); } if (var =='H') {digitalWrite (frled1, HIGH); } if (var =='B') {analogWrite (speeden, 150); escritura digital (6, ALTA); escritura digital (7, BAJA); escritura digital (8, ALTA); escritura digital (9, BAJA); digitalWrite (bcled1, HIGH); } if (var =='X') {digitalWrite (9, LOW); digitalWrite (8, BAJO); digitalWrite (7, BAJO); digitalWrite (6, BAJO); digitalWrite (frled1, LOW); digitalWrite (bcled1, BAJO); } if (var =='L') {escritura digital (6, BAJA); escritura digital (7, BAJA); escritura digital (8, ALTA); escritura digital (9, BAJA); } if (var =='R') {digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, LOW); digitalWrite (9, LOW);; }} Esquemas
Proceso de manufactura
- Constructor C#
- Convierte tu Raspberry Pi en un rastreador de ejercicios para hámster
- Su teléfono inteligente y el automóvil conectado
- Cómo convertir su cadena de suministro en un centro de ganancias
- ¿Cómo convertir tus diseños creativos en realidad?
- Cómo arreglar el aire acondicionado de tu auto en unos pocos pasos
- ¿Cómo elegir un turbocompresor para su automóvil?
- Cómo arreglar la manija de la puerta de tu auto
- Cómo recargar el aire acondicionado de tu coche
- ¿Cómo reparar el óxido de tu coche?
- ¿Por qué tienes que cambiar el aceite del motor de tu coche?