


Cómo decidir qué robot es mejor con la visualización del espacio de trabajo
¿Cómo puede saber si un robot se adaptará a las necesidades de espacio de su tarea antes de comprarlo?
Incluso cuando haya reducido su selección según todas las especificaciones y métricas habituales, es posible que todavía tenga algunas dudas persistentes.
¿El robot será tan grande que no cabe en el espacio que tiene disponible para él?
Si elige un robot más pequeño, ¿podrá llegar a todas las áreas que necesita para la tarea?
¿Existe alguna forma de optimizar el tamaño del robot para que sea más eficiente?
Antes de comprar un robot en particular, es difícil saber cómo será tenerlo a su lado en sus instalaciones. Puedes ver todos los videos de YouTube que te gustan, leer todas las hojas de datos e incluso ver otros robots en las instalaciones de otras personas...
Sin ver cómo encajará el robot en su tarea específica, a veces puede terminar como un juego de adivinanzas. Haces tantos cálculos como puedes, luego solo esperas.
O elige ser demasiado conservador y ceder grandes cantidades de espacio a un robot que no lo necesita.
Quizás ya haya leído nuestra Guía para elegir un robot para la fabricación.
Ha identificado qué tipo de robot necesita, qué efector final y qué accesorios. Ha reducido sus opciones a una selección de robots en función de su carga útil y repetibilidad. Y ha utilizado nuestras herramientas para seleccionar un alcance que parece más o menos razonable.
Pero aún no puede visualizar el espacio completo que ocupará cada robot.
Por qué es difícil imaginar el espacio que ocupará un robot
El problema con los robots es que son muy dinámicos.
Con una máquina CNC, por ejemplo, puede acercarse a una máquina en una feria comercial y ver exactamente cuánto espacio ocupará en su área de trabajo. El tamaño completo de la máquina es fácil de calcular:básicamente es un gran paralelepípedo.
Con un robot, el espacio que ocupa no es tan simple. Además de las dimensiones físicas del propio robot, también ocupa un espacio extendido que contiene todas las ubicaciones a las que llegará el efector final del robot cuando se mueva. Esto se conoce como el "área de trabajo" del robot.
La mayoría de los robots industriales de 6 grados de libertad tienen un espacio de trabajo que es algo así como una esfera. Los robots Delta tienen un espacio de trabajo complejo que parece un arco tridimensional. Los robots SCARA tienen un espacio de trabajo cilíndrico.
Es difícil saber con solo mirar un robot cómo será su espacio de trabajo.

¿Cómo puede asegurarse de que el robot que está considerando tendrá un espacio de trabajo que se adapte a sus necesidades?
La visualización del espacio de trabajo lo ayuda a tomar una mejor decisión
Afortunadamente, existe una forma de ver fácilmente el espacio de trabajo del robot y averiguar cómo afectará a su tarea específica.
Y puede hacer esto incluso antes de elegir qué robot desea comprar.
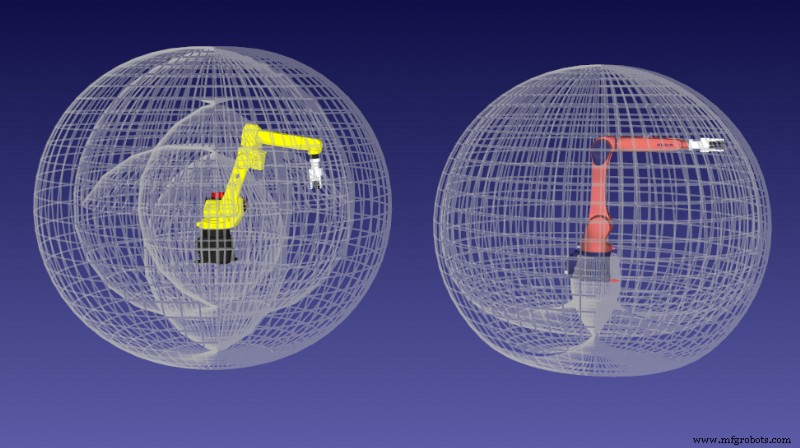
La visualización del espacio de trabajo es una herramienta que le permite visualizar los límites exteriores del espacio de trabajo de un robot como una forma 3D. En RoboDK, este espacio se muestra como un contorno gris que se coloca alrededor del modelo simulado del robot.
Puede usar esta función para informar su decisión sobre qué robot es el mejor para su tarea.
Al crear una maqueta virtual de su aplicación, puede cambiar rápidamente entre diferentes modelos de robot (sin tener que programar la tarea en sí) y usar la función de visualización del espacio de trabajo para ver si cada robot específico será el mejor para satisfacer sus necesidades.
Una vez que haya encontrado un robot que se ajuste a la tarea, en función de su espacio de trabajo, puede programar la aplicación en el simulador para asegurarse de que el robot elegido realmente pueda hacer el trabajo.
Cómo funciona la visualización del espacio de trabajo
Cuando mira la hoja de datos de un robot, normalmente verá una representación pictórica básica del espacio de trabajo de ese robot. Por lo general, esto consiste en una vista lateral y otra desde la parte superior del robot.
Estas imágenes son útiles, pero no lo suficiente.
Una visualización del espacio de trabajo es básicamente una versión 3D de dichas imágenes. Se produce moviendo algorítmicamente todas las articulaciones del robot a través de todas las posiciones posibles y mapeando la posición resultante del efector final en una forma 3D.
Como el cálculo se realiza en 3D, le brinda una perspectiva mucho más holística sobre las capacidades de un robot en particular que la que tendría si solo mirara la hoja de datos del robot.
El impacto de agregar un efector final
Los cambios que realice en el robot a veces también afectarán su espacio de trabajo. Por ejemplo, cuando agrega un efector final, las dimensiones de ese efector final cambiarán el tamaño y, a veces, también la forma del espacio de trabajo. En RoboDK, puede elegir ver el espacio de trabajo del robot con y sin su efector final.
Siempre que agregue un efector final a su robot, es una buena práctica usar la función de visualización del espacio de trabajo para ver cómo afectará el espacio de trabajo del robot.
Cómo comenzar a usar la visualización del espacio de trabajo
Con RoboDK, es muy fácil usar la visualización del espacio de trabajo para ayudarlo en sus decisiones de compra de robots.
Estos son los pasos para ver el espacio de trabajo de cualquier robot en particular:
- Cargue el modelo de robot en RoboDK desde nuestra extensa biblioteca de robots.
- Abra el panel de propiedades del robot haciendo clic derecho sobre él en el árbol de programas.
- Vaya a la sección llamada WorkSpace y elija ver el espacio de trabajo del propio robot (desde su pestaña) o con la herramienta actual adjunta.
- Ahora verá el espacio de trabajo del robot visualizado alrededor del propio robot.
Por supuesto, no está restringido a ver solo el espacio de trabajo de un robot a la vez. Puede cargar varios robots en la simulación y comparar sus espacios de trabajo uno al lado del otro.
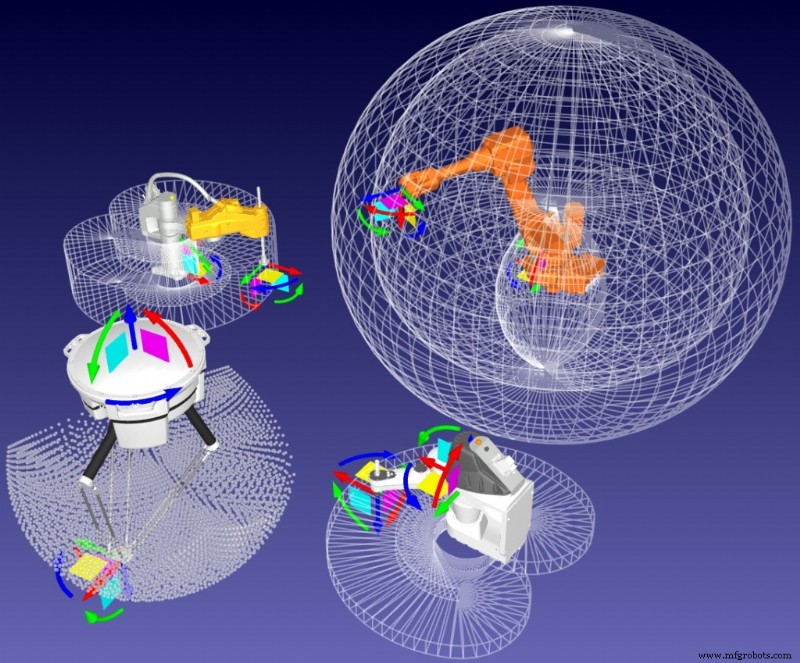
Esto puede ser útil cuando intenta decidir entre dos modelos de robot diferentes. Pero también puede ser útil cuando utiliza varios robots en una sola tarea y desea averiguar cómo sus espacios de trabajo pueden interactuar y superponerse.
¿Cómo podría ayudar la visualización del espacio de trabajo a la implementación de su robot? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- ¿Qué robots de pintura industrial funcionan mejor?
- Los 10 mejores fabricantes de robots SCARA
- Cómo decidir qué empresa de ingeniería es la adecuada para usted
- Entrenamiento gratuito de robots con RoboDK
- Robot Drilling 101:Cómo implementar un sistema de perforación robótica
- Cómo Hollywood crea impresionantes accesorios con fresado robótico
- 10 trucos para lograr los mejores resultados con la soldadura robótica
- Cómo convencer a la gerencia para que acepte el mecanizado robótico
- Cómo un ingeniero logró un grabado robótico sin polvo con RoboDK
- Cómo comenzar con la programación de robots de Yaskawa
- Calibración de robots:¿Qué piezas deben calibrarse?