


Cinemática inversa en robótica:lo que necesita saber
¿Qué es la cinemática inversa?
¿Cuánto necesita saber al respecto para aprovechar al máximo su robot?
La cinemática inversa para la robótica es un tema enorme y, a menudo, complejo. Dependiendo de su proyecto, es posible que necesite conocerlo con gran detalle o manejarlo con conocimientos básicos.
Esta es la información esencial que necesita saber sobre cinemática inversa para robótica.
¿Qué es la cinemática inversa?
La cinemática inversa es un proceso matemático que se utiliza para calcular las posiciones de las articulaciones que se necesitan para colocar el efector final de un robot en una posición y orientación específicas (también conocida como su "postura"). Se necesita una solución cinemática inversa confiable para programar un robot para realizar tareas.
Es importante tener claras las diferencias entre la cinemática inversa y la cinemática directa del robot.
La cinemática directa determina dónde estará el efector final si las juntas se establecen en una posición específica. Solo hay una solución para la ecuación cinemática directa. Cuando las juntas se establecen en una posición específica, el efector final siempre terminará en el mismo lugar.
Con la cinemática inversa, a menudo hay múltiples soluciones diferentes y múltiples enfoques para calcular la solución cinemática inversa.
Porque necesitamos la cinemática inversa en robótica
Si no tuviéramos cinemática inversa, la programación de robots sería extremadamente difícil... si no imposible.
Cuando desee que el efector final de su robot se mueva a un punto particular en su espacio de trabajo, tiene sentido que ingrese la pose deseada en el programa.
Pero no puede simplemente decirle a un robot que vaya a su X, Y y Z deseados. coordenadas y espera que el robot entienda tus instrucciones... no sin cinemática inversa.
La mayoría de los robots industriales están construidos con varias juntas articuladas controlables de forma independiente. Cada junta está conectada a una o más de las otras juntas, a veces en configuraciones complejas. El efector final se adjunta al final de toda la "cadena cinemática". Cuando mueva cualquier articulación, esto afectará la pose del efector final de varias maneras.
Esto significa que no existe una relación simple y directa entre la posición del efector final y cualquier articulación en particular.
Por ejemplo, si desea que el efector final del robot se mueva 1 mm linealmente a lo largo del eje Z, es posible que deba mover todas las articulaciones en una cantidad diferente.
Por último, los algoritmos de cinemática inversa calculan la posición exacta de cada una de las articulaciones del robot requeridas para alcanzar la pose deseada del efector final.
Cómo encontrar la cinemática inversa de un brazo robótico
Cuando investiga un poco sobre cinemática inversa para robótica, a menudo encontrará páginas y páginas de ecuaciones, fórmulas y descripciones de algoritmos. Esto se debe a que el cálculo de la cinemática inversa es un campo bien establecido en la investigación de la robótica. No mucha gente habla de cinemática inversa fuera del campo de la investigación (a excepción de los animadores 3D).
Sin embargo, cuando estamos utilizando robots para aplicaciones industriales, existen 2 opciones básicas para encontrar una solución de cinemática inversa:
- Puede hacer todo el trabajo matemático y de programación usted mismo para crear un solucionador de cinemática inversa para su robot específico.
- Puede usar un solucionador cinemático inverso existente para su robot específico que funciona "listo para usar".
Cuál de estos elija dependerá de su situación particular.
Si ha construido el robot usted mismo, es decir, lo construyó desde cero conectando motores y enlaces mecánicos, probablemente tendrá que elegir la opción 1.
Si está utilizando un robot industrial que proviene de un fabricante de robots, la opción 2 casi siempre será más rápida y sencilla.
El método difícil:crear un solucionador de cinemática inversa
Si elige crear su propio solucionador cinemático inverso, ¡prepárese para una programación seria!
Hay 2 enfoques fundamentales para calcular la cinemática inversa:
1. Soluciones cinemáticas inversas analíticas
Un solucionador cinemático inverso analítico podrá tomar la pose deseada del efector final y (casi) escupir inmediatamente las posiciones conjuntas requeridas.
Esto se debe a que, "debajo del capó", la cadena cinemática del robot se ha reducido a una expresión de forma cerrada:para cualquier pose del efector final, hay una definición matemática de las posiciones articulares requeridas.
Aunque podría realizar el trabajo de generar la expresión de forma cerrada usted mismo (a mano), esto no suele ser necesario. En estos días, la biblioteca IKFast hace que esta tarea sea mucho más fácil de lo que solía ser en el pasado.
2. Solucionadores numéricos/iterativos de cinemática
No todos los robots tienen una solución cinemática inversa analítica. Cuando la estructura cinemática del robot es compleja o inusual, la única opción es utilizar un solucionador numérico de cinemática inversa.
Además, en una solución numérica, no hay una expresión clara de forma cerrada. En cambio, cuando ingresa la posición deseada del efector final, un algoritmo iterativo trabaja para encontrar una solución para las posiciones articulares requeridas al tratarlo como una solución de optimización.
En cada iteración, el algoritmo ingresa algunas posiciones articulares en la ecuación cinemática directa del robot para averiguar dónde termina el efector final. En la próxima iteración, utiliza esta información para modificar aún más las posiciones conjuntas. Esto moverá gradualmente el efector final hacia la pose deseada.
Debido a este enfoque iterativo, las soluciones de cinemática inversa numérica son más lentas que las soluciones analíticas.
El método fácil:utilice un solucionador probado de cinemática inversa
Crear tu propio solucionador de cinemática inversa es un buen ejercicio intelectual cuando estás en la universidad o si estás construyendo tu propio robot desde cero.
Pero, si solo desea utilizar su robot en un entorno de producción, es poco probable que necesite crear su propio solucionador de cinemática inversa.
Es mucho más fácil y rápido usar un solucionador existente que ya está incorporado en el entorno de programación de su robot.
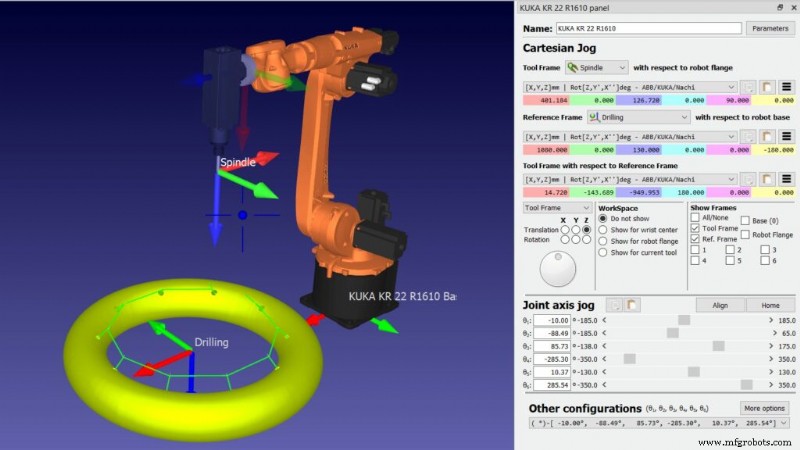
Todos los robots de la Biblioteca de robots de RoboDK vienen con sus propios solucionadores cinemáticos inversos. Esto le permite comenzar a programarlos inmediatamente sin tener que pensar en ello.
La mayoría de nuestros solucionadores son soluciones analíticas generadas previamente que vienen empaquetadas con el archivo del robot. Sin embargo, algunos de los robots más complejos de la biblioteca utilizan solucionadores numéricos. Incluso con los solucionadores numéricos, la velocidad reducida de cálculo no es un problema con RoboDK, ya que estará programando su robot fuera de línea antes de enviar su programa al propio robot.
Después de todo, solo cree su propio solucionador cinemático inverso si realmente es necesario.
De lo contrario, su tiempo estará mucho mejor invertido en crear el programa de robot para su tarea y ponerlo en producción más rápido.
¿Qué preguntas tiene sobre la cinemática inversa en robótica? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- Mantenimiento predictivo:lo que necesita saber
- Lo que necesita saber sobre la certificación CMMC
- Lo que necesita saber sobre el ensamblaje de PCB
- Mecanizado preciso de metales:lo que necesita saber
- Lo que necesita saber sobre el proceso de sobremoldeo
- Lo que necesita saber sobre la exportación de maquinaria
- Motores de CA y CC:lo que necesita saber
- Lo que debe saber sobre el frenado dinámico
- Lo que necesita saber sobre los frenos de asistencia hidráulica
- Lo que debe saber sobre el material de fricción industrial
- Lo que necesita saber sobre la financiación de equipos