


Cómo programar un robot transportador sin volverse loco
Programar un robot transportador es más complicado de lo que mucha gente imagina. Una buena simulación es la clave del éxito, pero ¿cómo hacerlo sin volverse loco?
Las cintas transportadoras son una manera fácil de mover productos a su robot, ¿verdad?
Bueno en realidad no. A menudo pensamos en los transportadores como una solución simple pero, en realidad, son uno de los métodos más complicados de entrega de piezas de trabajo. Requieren que el robot detecte y rastree los objetos que se mueven en el transportador. Necesitan ser controlados a través del programa de robot. También sufren varios problemas mecánicos a lo largo de su vida útil, como seguimiento deficiente, desgaste de la correa y deslizamiento. Todo esto significa que los transportadores pueden volverte un poco loco.
En lugar de ser simples, pueden ser complicados de usar.
No podemos resolver los problemas mecánicos de sus transportadores; para eso, necesita un buen programa de mantenimiento como el que se muestra en esta práctica lista de verificación de Cisco-Eagle. Sin embargo, podemos ayudarlo a simular el transportador fácilmente para que pueda probarlo e integrarlo con la programación de su robot.
Aquí le mostramos cómo programar su robot transportador sin volverse loco.
Las 5 partes móviles complicadas de un transportador robótico
Primero, es importante entender por qué programar un transportador es un desafío.
Hay 5 "partes móviles" que dificultan la integración de la programación del robot con los transportadores.
1. Control del propio transportador
Puede parecer que el control del transportador es solo un trato de "encendido/apagado", pero generalmente es un poco más complejo que eso. Los transportadores tienen una variedad de opciones de control, según el modelo. Algunos tienen una velocidad fija mientras que otros pueden controlarse con velocidades variables. Algunos tienen un modo inverso, frenado activo o cambio rápido. Luego existen diferentes métodos de control, siendo los tres más comunes el control de pulsos, el control de velocidad y el control distribuido.

Es posible que deba controlar el transportador dentro del propio programa de robot. De lo contrario, es posible que deba interactuar con el transportador a través de una red. Ambas opciones agregan complejidad a la programación.
2. Seguimiento y detección de objetos
Para recoger objetos de un transportador en movimiento, el robot debe poder localizarlos de forma fiable. Esto significa que necesita algún tipo de sensor para detectar cuando un objeto llega frente al robot. Además, es posible que el robot necesite alguna forma de rastrear los objetos a medida que se mueve el transportador.
Los sensores más comunes para esto son sensores de visión (por ejemplo, cámaras 2D o 3D) y sensores de detección de piezas (por ejemplo, haces de luz, sensores magnéticos, sensores inductivos, etc.). Algunos son más simples de integrar que otros, pero todos ellos agregan una complejidad adicional a su programa.
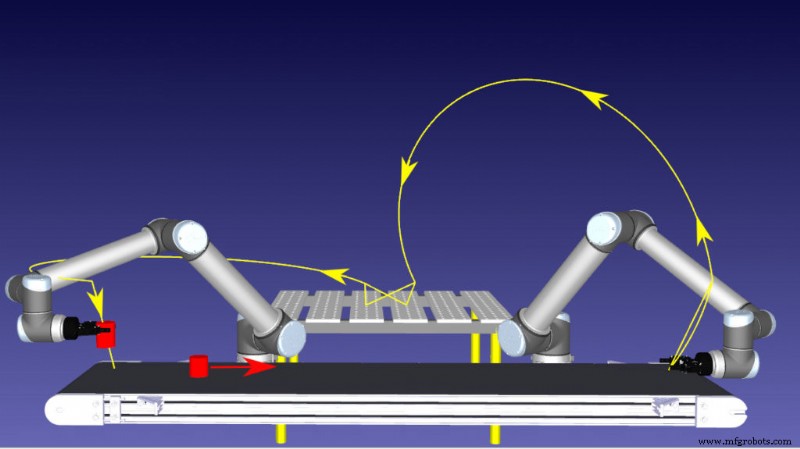
3. Manejo de objetos en movimiento
Un objetivo en movimiento siempre es más difícil de manejar que uno estático. Esto introduce complejidad cuando se toma de una cinta transportadora. El robot debe poder moverse a su posición, agarrar el objeto con firmeza y alejarse mientras siguen llegando nuevos objetos.
La velocidad del transportador debe ajustarse con precisión a la velocidad del robot, de lo contrario, se pueden perder objetos. Si has visto la famosa "escena del chocolate" de la comedia de 1950 I Love Lucy, sabrás a lo que me refiero (y aquí está si aún no la has visto).
4. Elección del efector final
El brazo robótico no es la única parte del sistema que necesita mantenerse al día. El efector final puede tener un efecto significativo en el tiempo del ciclo y, por lo tanto, en la velocidad del transportador. Algunos tipos de efectores finales son más rápidos que otros.
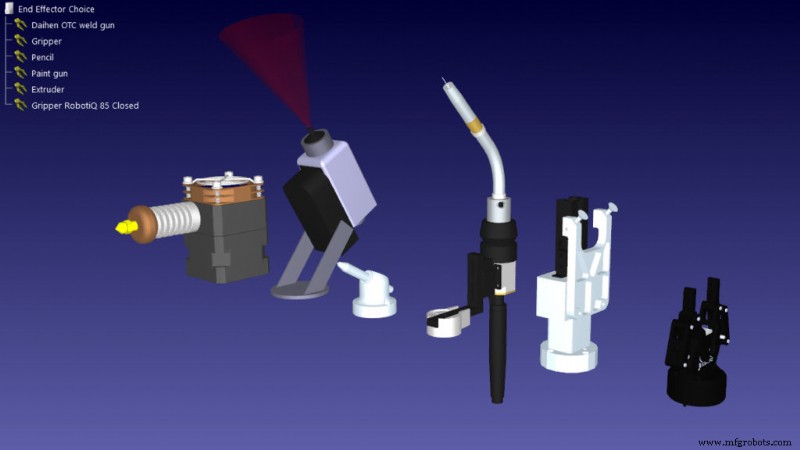
Esto significa que ahora tenemos que controlar y coordinar 3 velocidades independientes simultáneamente:la velocidad del transportador, la velocidad del brazo del robot y la velocidad de agarre del efector final.
5. Uso de accesorios
La parte móvil final, en realidad, no es una parte móvil en absoluto. Los accesorios son partes mecánicas estáticas que se fijan al transportador para mover los objetos a su posición. Son una forma fiable de ordenar los objetos en el transportador sin utilizar sensores.
Por ejemplo, puede usar un accesorio como alternativa al uso de un sensor de visión. Con una lámina de metal especialmente formada, puede canalizar objetos en una cola estática, lo que permite que el robot los recoja sin sensores adicionales. Simplifican la programación, pero aumentan la complejidad del diseño mecánico.
Cómo simular un transportador con RoboDK
Puede superar los cinco desafíos anteriores simulando su sistema robótico y probándolo minuciosamente antes de usar el sistema físico. Esto no siempre es fácil con los simuladores de robots, muchos de los cuales no tienen una capacidad simple para agregar transportadores.
Afortunadamente, los transportadores son bastante simples en RoboDK. Incluso hay dos opciones para agregarlos, dependiendo de cuánto control necesites.
Los dos tipos de transportadores en RoboDK son:
Opción 1:Programación en Python
El método más flexible para crear un transportador en RoboDK es programarlo en Python. Puede ver esto en acción en el video de ejemplo Simulación de transportador con RoboDK.
Las ventajas de la programación en Python son:
- Es muy flexible. El movimiento del transportador solo está limitado por su habilidad de programación. Puede programar el transportador simulado para que coincida con las propiedades de su banda real.
- Es completamente personalizable. Puede programar el transportador para que se mueva de la forma que desee. Tienes control total sobre sus movimientos y cómo maneja los objetos.
- Permite transportadores más complejos. Si su transportador tiene modos de control avanzados, estos pueden incluirse en el código python. Además, si ha colocado un accesorio para mover objetos al costado de la banda, por ejemplo, esto puede programarse en el código.
Las desventajas de la programación en Python son:
- Requiere conocimientos de programación . Tienes que saber programar en python. Este es uno de los lenguajes más fáciles de aprender, pero aún requiere una curva de aprendizaje si hasta ahora solo has usado la interfaz gráfica de RoboDK.
- Se tarda un poco más . En comparación con la opción de mecanismo lineal, la programación de Python lleva tiempo. Además, cuanto más complejo sea su transportador, más tiempo llevará programarlo.
Opción 2:Mecanismo lineal
La otra opción es crear un mecanismo lineal utilizando el asistente "Modelar mecanismo". Esto le permite crear un transportador simple con un solo eje lineal.
Las ventajas del mecanismo lineal son:
- Es rápido. Puede crear un mecanismo lineal en cuestión de minutos y agregar el transportador a su simulación de robot muy rápidamente.
- Utiliza el asistente gráfico. Puede crear el mecanismo usando el asistente usando solo marcos de referencia y objetivos.
- Requiere poca o ninguna programación. No tiene que hacer ninguna programación en Python para crear el transportador. Sin embargo, tenga en cuenta que probablemente tendrá que hacer alguna programación para detectar objetos en el transportador.
Las desventajas del mecanismo lineal son:
- Es limitado. La naturaleza simple del mecanismo significa que solo puede modelar un transportador de un solo eje.
- Es inflexible. Esta opción dificulta modelar las opciones de control más avanzadas de su transportador. También dificulta la detección de objetos que caen del transportador.
Cómo empezar
La opción que elija depende en gran medida de lo mucho que desee evitar la programación de Python. A menos que tenga una buena razón para elegir el mecanismo lineal, generalmente recomendamos elegir la opción de python. Es mucho más flexible y, creo (aunque soy programador), es más fácil de entender e implementar.
Cualquiera que sea la opción que elija, no tiene que crear la simulación del transportador desde cero.
Tenemos ambas opciones disponibles para descargar en nuestra Biblioteca de robots. Simplemente elija "Objeto" en el menú "Tipo" y verá las dos opciones:"Modelo de Python" para la opción de python; y "Mecanismo modelo" para la opción de mecanismo lineal.
Si te quedas atascado, siempre puedes publicar un comentario en el foro de RoboDK y haremos todo lo posible para ayudarte.
Robot industrial
- Cómo los robots de pulverización mejoran la coherencia
- Cómo los robots de pintura reducen el retrabajo
- ¿Cómo alcanza un robot la autonomía total?
- Transportadores locos
- Documento técnico:Cómo encontrar el potencial de su robot
- Guía definitiva:Cómo elegir un robot SCARA adecuado
- Robot Machine Tending:qué es y cómo funciona
- Robot Raspberry Pi:cómo construir un robot Raspberry Pi
- Cómo reducir el tiempo de capacitación para la soldadura robótica
- La forma correcta de simular un transportador robótico
- Cómo elegir la estructura del transportador