


¿Cómo alcanza un robot la autonomía total?
Cuando la mayoría de la gente piensa en robots totalmente autónomos, se preocupa por escenarios imaginativos de IA que tienen poca base en los hechos reales y misterios que conocemos sobre la conciencia. Mientras se concentra en eso, se vuelve más difícil para las personas ver el valor práctico de los robots que pueden funcionar de forma independiente y sin una supervisión sustancial cuando hay una variedad de trabajos, procesos e industrias que NECESITAN mucha más ayuda para mejorar tanto su rentabilidad como su impacto positivo.
Al mismo tiempo, la autonomía del robot ha sido víctima de algunas definiciones descontroladas, y expectativas, que no son necesariamente útiles para comprender qué necesita un robot para volverse autónomo y dónde la autonomía se puede lograr más rápidamente.
Para permitir que un robot alcance la autonomía total, se deben cumplir varios criterios:
- El robot debe poder obtener información significativa sobre su entorno por sí solo
- El robot debe poder procesar esa información de una manera estructurada y utilizable
- El robot debe poder planificar sus acciones en respuesta a esa información
- El robot debe poder ejecutar el plan que genera de manera oportuna
En todas estas circunstancias, es importante comprender algunas cosas más en términos de cómo se estructuran estos parámetros:
- Un robot debe tener un objetivo. Si bien tradicionalmente asociamos la autonomía humana con la capacidad de establecer las propias metas, no existe un parámetro esperado dentro del cual los robots de hoy se vuelvan conscientes de sí mismos.
- La autonomía de un robot debe ser específica para cada caso de uso. Un automóvil completamente autónomo puede funcionar en diferentes niveles:algunos en la carretera, otros en todos los terrenos. Dependiendo de las circunstancias, ambos pueden ejercer el mismo grado de autonomía.
- El diseño funciona mejor cuando minimiza la necesidad de participación humana, mientras que ciertas aplicaciones "cobot" autónomas pueden ayudar a optimizar la productividad o el logro de un objetivo deseado, en la mayoría de las circunstancias, la autonomía no sería un calificativo adecuado cuando la participación humana directa se requiere.
Entonces, ¿cómo llegamos del punto A al B? ¿Cómo se vuelve completamente autónomo un robot "programable" tradicional? Bueno, ¡ahí es donde comienza la diversión!
Obtener información sobre el medio ambiente
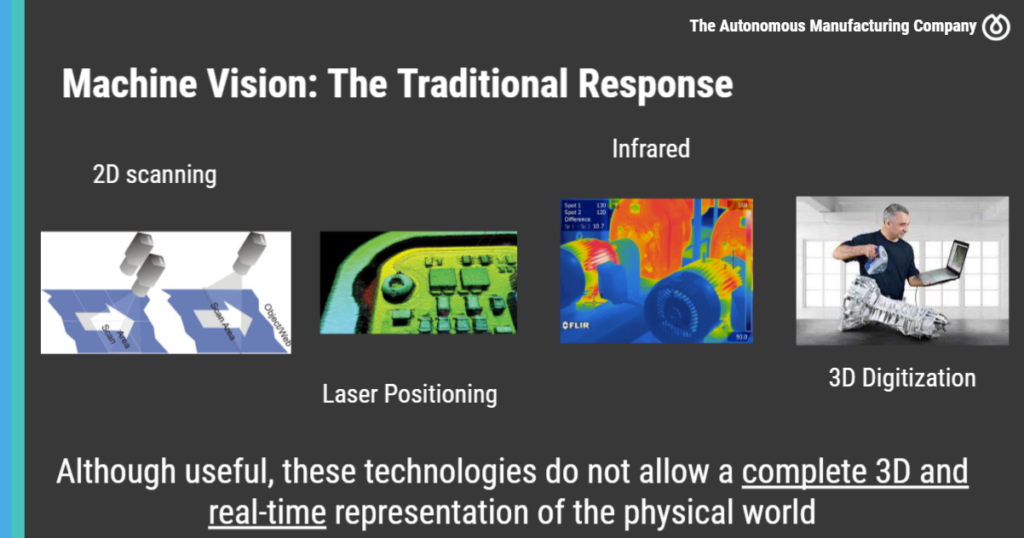
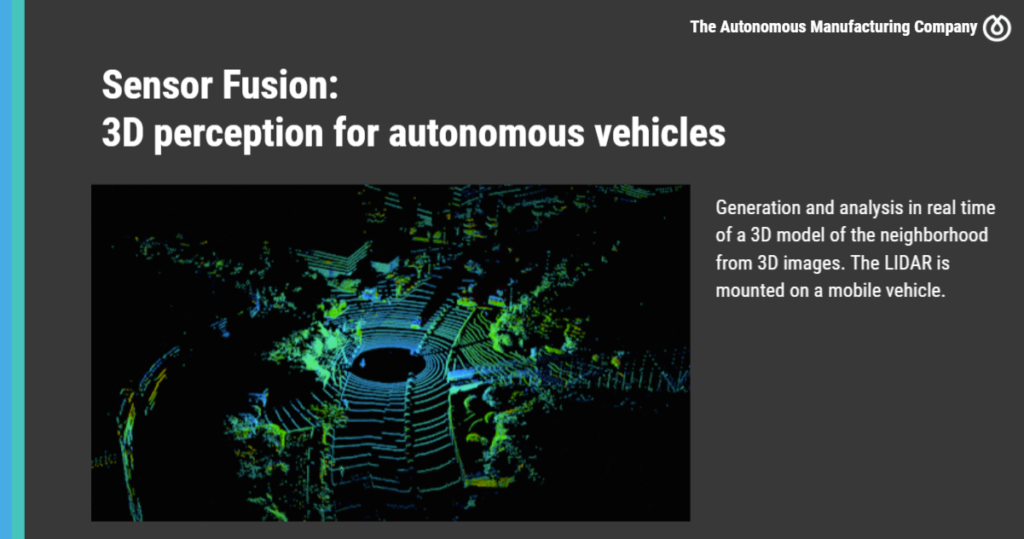
Existe una amplia gama de soluciones para que un robot sepa lo que sucede a su alrededor. Lidar, radar, sonar, sensores táctiles, todo tipo de sistemas de visión, un sinfín de mecanismos de comunicación diferentes desde sensores extra-robóticos, cámaras o sistemas de información local que pueden ser de audio o video por naturaleza. Todos estos son simplemente un intento de dar a los robots los mismos tipos de sentidos que tiene un humano, y han sido durante mucho tiempo el estándar en campos como el control automático de máquinas para procesos de automatización altamente especializados.
Es importante tener en cuenta que la detección no es la única limitación aquí. Por ejemplo, en sistemas industriales que ahora están habilitados para IoT (Internet de las cosas), o al menos conectados en red, se pueden conectar diferentes procesos y controladores lógicos programables en diferentes cadenas que se utilizan para ejecutar diferentes procesos. Sin embargo, lo que se puede hacer a partir de ahí es incorporar esa información en procesos robóticos para comprender la posición, la orientación y la manipulación necesaria para que tenga lugar en un objeto.
Fuera de las circunstancias industriales, se pueden aplicar los mismos modelos, pero deben contextualizarse con los tipos correctos de información conectada. Por ejemplo, si alguien está buscando crear un robot para atención médica o de ancianos, las capacidades de detección externa pueden ser útiles para administrar la salud de un paciente, pero sin la seguridad y el anonimato adecuados, también podrían ofrecer privacidad o riesgos de agencia cuando se trata de quién está siendo cuidado y por qué robot bajo qué circunstancias.
De la misma manera, 5G se considera una gran oportunidad para coordinar entre los futuros automóviles autónomos y generar eficiencias en la automatización de todos los aspectos de la conducción y el transporte, todo mientras se optimizan aspectos como las condiciones de las carreteras, los cuellos de botella, las carreteras bloqueadas y más. Si bien estas son aplicaciones muy poderosas, la forma en que la información se traduce a un robot debe manejarse con delicadeza. Después de todo, un gran poder conlleva una gran responsabilidad.
Procesamiento de la información de forma estructurada
¿Cómo se supone que uno puede digerir la información de una manera utilizable? Cuando pensamos en cómo lo hacemos como humanos, es una segunda naturaleza o, a menudo, instintivo en términos de cómo tomamos decisiones. Lo que a menudo no nos damos cuenta es que muchas de nuestras decisiones se basan en rasgos adquiridos evolutivamente, social o conductualmente, así como en características de nuestras personalidades, que hacen que la forma en que operamos a veces parezca determinista, ¡aunque no sin sorpresas o diversión!
Sin embargo, cuando se trata de robots, ¡no nos gustan las sorpresas! Felices sorpresas, claro:cosas como descubrir que un robot es mejor o más eficiente de lo que podríamos esperar son geniales, pero si eso significa que debemos anticipar todas las funciones posibles de un robot autónomo, ya sea en la entrega, el transporte, la prestación de atención. , manejo de materiales, inspección, mantenimiento predictivo, procesos industriales o simplemente un perro robot que hace volteretas hacia atrás:administrar nuestras expectativas es mucho más preferible que una “falla en el funcionamiento”.
Debido a esto, es importante darse cuenta de que la creación de un robot autónomo rara vez significará que las cosas funcionen de inmediato. Si bien algunas empresas y académicos están trabajando en formas de simplificar los modelos fundamentales de detección y procesamiento de los robots autónomos, esos modelos deben contribuir en última instancia a los modelos de proceso que simplifican la capacidad de un robot para usar la información de una manera procesable.
Planificación de acciones a partir de datos
Los datos generados por los mecanismos de detección de un robot se pueden digerir de diversas formas. En última instancia, para los datos visuales en 3D, la forma más sencilla posible es descomponer y reintegrar los datos de una forma en un objeto completo. Este es un proceso paralelo que requiere la acumulación de muchas operaciones pequeñas, mientras que el cerebro humano funciona de manera muy flexible de esta manera, generar modelos confiables para este tipo de procesamiento requiere una repetición y validación significativas.
El aspecto más útil de este proceso es inyectar datos en un modelo de proceso general para lo que sea que el robot necesite hacer. ¿Levantar y llevar algo? ¿Dejar el correo en un buzón? ¿Pintar o soldar algo? Cada una de estas acciones requiere una comprensión holística de la naturaleza, ubicación, posición y resultados de incumplimiento de un objetivo (por ejemplo, el correo va en la casilla, pero hay un agujero en la parte inferior y cae en un arbusto).
Al mismo tiempo, para ampliar este ejemplo de correo, se deben establecer objetivos de reserva para alcanzar un resultado aún aceptable de forma automatizada sin sobrecargar las principales prioridades de la función autónoma del robot. Más simplemente:los robots autónomos deben poder improvisar, pero planificar esa improvisación requiere mucho trabajo.
Como dijo una vez Mark Twain:"Por lo general, me lleva más de tres semanas preparar un buen discurso improvisado". Esto no es simplemente una palabrería, sino que en realidad es muy instructivo en cuanto a cómo funcionan los humanos. Si bien a menudo podemos estar enfocados en las tareas que tenemos entre manos, tenemos un conjunto sofisticado de hábitos subconscientes con talentos adicionales como la "propiorecepción", que no son bien reconocidos.
Si bien estas son habilidades perfectas para un robot que necesitará hacer de todo, desde columpiarse de los árboles hasta cazar en la sabana y tal vez inventar la rueda y disparar un poco después. Se necesitaron millones de años para desarrollar estas capacidades, así que no se sorprenda de que conseguir que un robot funcione de forma autónoma pueda llevar más de una tarde.
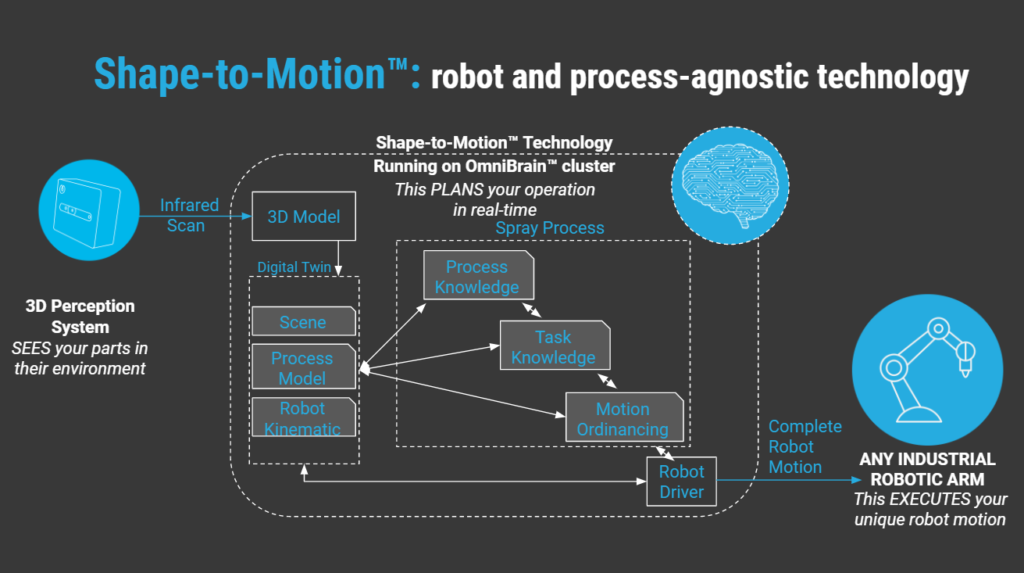
Entonces, en este contexto, ¿cuál es la respuesta para los robots? Bueno, de la misma manera que los humanos visualizan sus acciones antes de realizarlas, generando simulaciones o gemelos digitales de una función de robots autónomos y usándolos para inyectar expectativas del modelo de proceso (como dónde suele estar un buzón de correo o cómo se ve) es el El paso más grande que puede dar para crear un robot autónomo útil.
Ejecución del plan
Una vez que tenga un modelo de proceso, suficientes simulaciones y los mecanismos de detección correctamente calibrados, la ejecución es simplemente una cuestión de observación y optimización. Si el robot autónomo que está construyendo cumple con sus estándares desde el primer momento, entonces ni siquiera es necesario hacerlo. El valor fundamental de los robots es su consistencia, y los robots industriales modernos existentes son extremadamente confiables. Agregar capas de percepción e inteligencia para hacerlas receptivas a diferentes partes y posiciones crea ese nuevo mundo de autonomía que todos estamos buscando explorar
¿Qué sigue para esa autonomía? Simplificando la forma en que se construyen las aplicaciones, como se mencionó anteriormente, pero también aumentando la variedad de sensores, arreglos de robots, tareas, entornos y más que se pueden ejecutar. Lo tonto es que la automatización genera productividad, lo que en última instancia aumenta el crecimiento, los ingresos y la demanda de mano de obra. Ver la automatización como una amenaza para la fuerza laboral es la amenaza real , al tiempo que lleva la automatización a más espacios que no les gustan a los trabajadores hará que los trabajos sean más creativos, innovadores y divertidos que nunca, si es que la gente necesita trabajar. ¡Disfruta!

Omnirobotic proporciona tecnología robótica autónoma para procesos de pulverización, lo que permite a los robots industriales ver piezas, planificar su propio programa de movimiento y ejecutar procesos de acabado y revestimiento industriales críticos. Vea qué tipo de recuperación puede obtener aquí , u obtenga más información sobre cómo puede beneficiarse sistemas de fabricación autónomos .
Robot industrial
- Cómo los robots de pulverización mejoran la coherencia
- Cómo los robots de pintura reducen el retrabajo
- Documento técnico:Cómo encontrar el potencial de su robot
- ¿Cuánto cuesta la automatización robótica?
- Centro de soluciones virtuales:¿Cómo ayuda la simulación de robot a la integración del robot?
- Materiales para construir un robot:una lista completa
- Guía definitiva:Cómo elegir un robot SCARA adecuado
- Robot Machine Tending:qué es y cómo funciona
- ¿Cómo aprovecha Facebook la automatización para llegar a audiencias clave?
- Cómo reducir el tiempo de capacitación para la soldadura robótica
- Cómo comenzar con la programación de robots de Yaskawa