


Walbi, el bípedo ambulante
Componentes y suministros
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
¿No sería genial si pudiéramos hacer un robot bípedo con algunos servos? The Inner Geek pensó que sí y este es el resultado ...
Ese es Walbi, el WALink BIped, un robot que creamos para un proyecto de aprendizaje automático que nunca despegó (tampoco lo hizo Walbi, pero eso se debe a que tiene ambos pies firmemente plantados en el suelo).
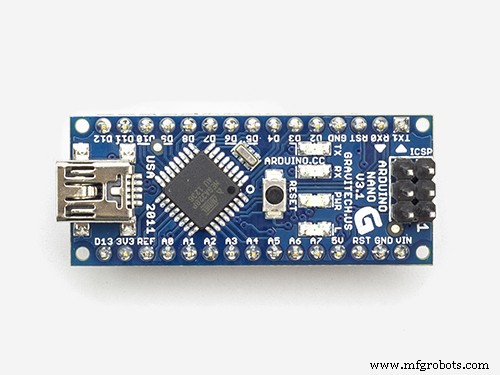
Walbi usa un Arduino Nano para "cerebro", servos LX-16A para "músculos" y piezas de plástico impresas en 3D para "huesos". Los servos LewanSoul LX-16A son servos de ensueño para proyectos robóticos pequeños (ish), ya que son livianos, pueden mover más de 19 kg.cm y están conectados con un solo cable, que va de servo a servo, lo que hace que el cableado del robot infantil jugar.
Walbi es un humanoide de escala 2:1 y sus piernas miden 55 cm de altura (21,7 pulgadas) desde el talón hasta la cintura y pesan 1,1 kg (2,4 libras). Las partes blancas de su cuerpo fueron impresas en 3D, pero podrían haberse hecho fácilmente con madera resistente y liviana.
Programar Walbi es muy simple. Puede descargar a continuación los dos programas necesarios para realizar la captura y reproducción de movimiento, y luego puede hacer que Walbi camine, gatee, trepe, salte o baile. Solo tienes que mover sus piernas a la pose deseada, grabar esa pose, darle forma a Walbi en otra pose, grabarla y así sucesivamente, y luego, cuando hayas grabado la secuencia completa, puedes sentarte hacia atrás y ver cómo realiza hábilmente el movimientos que le enseñaste.
Tal vez puedas enseñar al tuyo a bailar en el río 😀
Construyendo el Walbi
Walbi se imprimió en 3D en plástico PLA, utilizando una impresora FlashForge Creator Pro. Puede descargar los archivos STL de Thingiverse o utilizar un método alternativo para construir los pies, los "huesos" de las piernas y la cintura, utilizando madera o metal. Los soportes de los servos se conectan a estas partes, a los servos y entre sí.
Necesitará soportes metálicos de los cuatro tipos diferentes disponibles para unir los servos a las piezas impresas y entre sí (más información y fotos disponibles en el blog Release The Inner Gook).
Cableado
Para controlar los servos LX-16A, necesita una placa de depuración LewanSoul.
Recibirá comandos de un puerto serie en el Arduino Nano. Como usamos la serie de hardware de Arduino para comunicarnos con la computadora, usamos la biblioteca SoftwareSerial para crear un segundo puerto serial en el Nano, con el fin de conectarnos a la placa de depuración.
El cableado se minimiza con los servos en serie. Hay un cable de cada servo al siguiente (cable serial provisto con los servos) y los servos en la cintura se conectan directamente a la placa de depuración. Su computadora se conecta al puerto USB del Arduino y el Arduino está conectado a la placa de depuración usando tres cables de puente (TX, RX y GND) conectados a los pines de Arduino que configura para SoftwareSerial; usamos los pines 10 y 1 en el código 1 .
Los servos utilizan una velocidad en baudios de 115200 (si sabe cómo cambiarla, infórmenos, ya que es demasiado alta). Esta velocidad en baudios es alta para SoftwareSerial, por lo que tuvimos que implementar funciones de verificación de errores y reinicio. En algunos casos, se requirió persistencia para obtener una lectura correcta.
Poder
Los servos pueden proporcionar 19,5 kg.cm a 7,4 v. Usamos 6v y la corriente de bloqueo estaba por debajo de tres amperios.
Programación
Puede obtener el código Arduino en el repositorio del proyecto Github.
Se utilizan dos programas para capturar y reproducir el movimiento, una técnica similar a la que se utiliza en las películas. Empiece por dar forma al robot en una pose. Como los servos tienen el motor apagado por defecto, puede girar los servos con la mano. Una vez que tenga el robot en la pose deseada, use el programa Walbi_record para leer y mostrar todos los ángulos de servo. Luego, ingresa esas lecturas de ángulo en la variable poseAngles en Walbi_play, y usa el programa para reproducir la secuencia de poses grabadas, a una velocidad establecida usando la variable timeToMove (en milisegundos).
Esperamos que haya disfrutado del proyecto. Siéntete libre de compartir tu amor dejando un comentario, suscribiéndote al blog o cualquier otro tipo de acción de retroalimentación. ¡Te lo agradecemos!
Inner Geek Nuggets
A continuación, se muestran algunos consejos y trucos aprendidos al crear Walbi:
- Los soportes para el LX-16A solo se acoplan al servo en UNA posición, por lo que es muy fácil conectarlos incorrectamente, especialmente a las partes impresas en 3D. Tuvimos que volver a montar Walbi un par de veces para corregir errores de montaje que eran bastante difíciles de detectar.
- Los servos venían con ID 1 por defecto. Asigne a cada servo una ID diferente antes de montarlos en el robot, o será imposible comunicarse con varios servos en serie conectados con la misma ID.
- El uso de bridas para cables realmente mejora la apariencia
- Los servos vienen con los tornillos necesarios para conectar los cuernos a los servos y los cuernos a los soportes. Los soportes vienen con los tornillos necesarios para sujetarlos a los servos. Deberá comprar tornillos por separado para el soporte de las conexiones de soporte y el soporte de la conexión de las piezas de plástico. Usamos tornillos y tuercas DIN912 M2-6 y M2-10.
- Puede mejorar la tracción pegando almohadillas de silicona en las plantas de los pies del robot.
- Es preferible usar cuernos de servo de metal, ya que los de plástico que vienen con los servos se rasgarán si (cuando) las patas chocan entre sí durante las pruebas. Si los cuernos se rompen, el robot se aflojará y la reproducción del movimiento perderá precisión (lo que, de lo contrario, es sorprendentemente bueno).
Código
Programas Arduino para control de movimiento y reproducción
https://github.com/ptavaressilva/WalbiPiezas y carcasas personalizadas
STL para piezas impresas en 3D
Originalmente impreso en un archivo ProCAD de Flash Forge Creator en thingiverse.comProceso de manufactura
- El futuro de la televisión en vivo
- Oda al prototipo
- El 555 IC
- La fórmula cuadrática
- Monitoreo de temperatura en Raspberry Pi
- Rastreo de rostro con movimiento horizontal / vertical con raspberry pi
- El Drone Pi
- Arquímedes:El búho robot con IA
- Las consecuencias de olvidar
- El UGI® 4313 +A
- El mejor soplador de hojas