


Tiempo de ciclo del robot:cómo calcular y optimizar su tiempo
Si desea maximizar su inversión en robótica, debe optimizar el tiempo de ciclo del robot.
El tiempo (como dicen) es dinero. Los robots realizan muchos ciclos por día. Cuando un robot se mueve innecesariamente lento o de manera ineficiente, esto puede significar que está perdiendo dinero.
Incluso recortar 2 segundos del tiempo de ciclo del robot puede ahorrar cientos de horas de trabajo en el transcurso de un año.
¿Cómo lo calculas?
¿Y cómo puede asegurarse de no perder dinero sin saberlo?
Aquí tienes una guía clara para ti.
¿Qué es el tiempo de ciclo del robot?
El tiempo de ciclo del robot es el tiempo que tarda un robot en completar un ciclo completo de su tarea programada. Incluye tanto el tiempo de valor agregado (cuando el robot se está moviendo o realizando la operación) como cualquier tiempo de espera sin valor agregado.
La investigación ha demostrado que los tiempos de ciclo más bajos resultan en costos reducidos por pieza de trabajo. Cuanto más largo sea el tiempo de su ciclo, más le costará crear sus productos.
Debido a que los robots son muy consistentes, el tiempo de ciclo tiene un impacto poderoso en la productividad general del robot. Cualquier ineficiencia o pérdida de tiempo ocurrirá en cada ciclo. Así, la ineficiencia se multiplica.

¡El tiempo es dinero! La necesidad de optimizar el tiempo del ciclo
¿Por qué es importante reducir el tiempo de ciclo de un robot? ¡Porque el tiempo es dinero!
Imagine que tiene un robot que realiza 1000 ciclos por día durante 5 días a la semana. Recortar solo 2 segundos del tiempo del ciclo le ahorraría 33 minutos por día. ¡Esto es un ahorro de 144 horas por año!
Como dice el integrador de sistemas Adil Shafi, el tiempo de ciclo es “una de las justificaciones financieras más importantes en el caso comercial de la robótica. Cada fracción de segundo en que algo se puede hacer más rápido se traduce directamente en dólares”.
Siempre debe estar atento a las formas en que puede reducir el tiempo de ciclo de su robot, incluso si es solo un poco. Con el tiempo, esto puede representar grandes ahorros.
¿Qué factores afectan el tiempo de ciclo del robot?
Varios factores afectan el tiempo de ciclo de su robot. Algunos de estos están bajo su control para cambiar. Otros no lo son.
Los factores que lo afectan incluyen:
- El modelo del robot
- El modelo y la configuración del controlador
- Específicos de la tarea que está realizando
- La velocidad y aceleración del robot
Algunos factores se relacionan con diferencias sutiles entre los robots físicos. Como resultado, no siempre es posible obtener un cálculo del tiempo de ciclo completamente preciso en un simulador de robot. Pero puedes acercarte bastante con la herramienta adecuada.
Cómo calcular el tiempo de ciclo del robot con RoboDK
Antes de que pueda mejorar su tiempo de ciclo, primero debe calcularlo. Aquí es donde puede beneficiarse de un buen simulador de robot.
RoboDK incluye la estimación del tiempo de ciclo como una funcionalidad central del software.
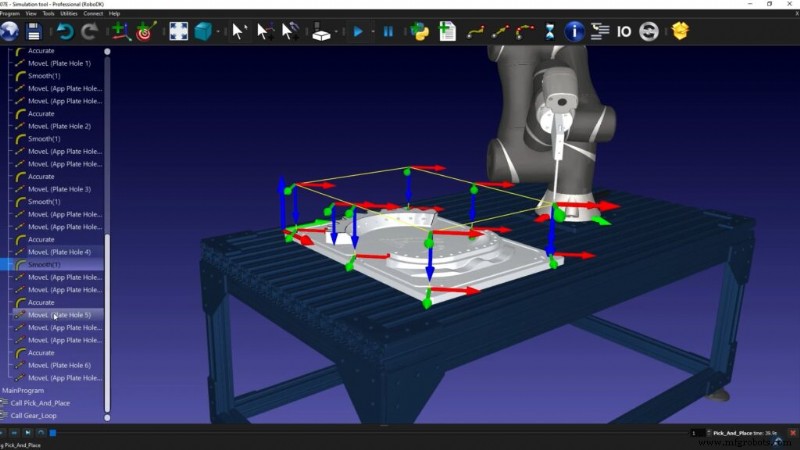
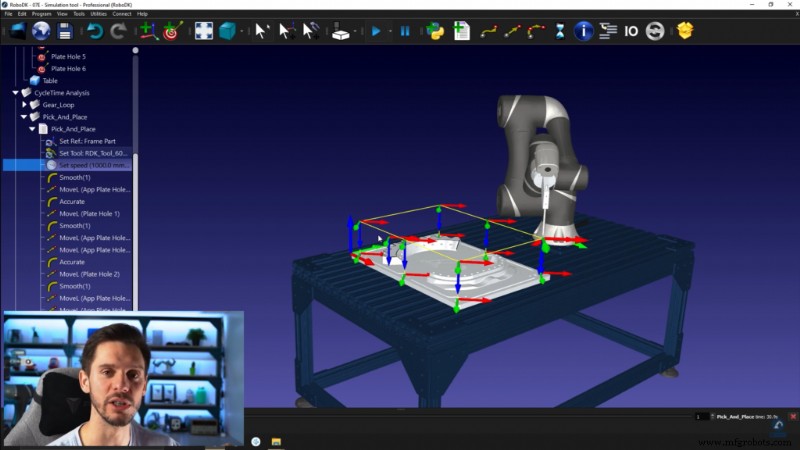
Los pasos para estimar el tiempo de tu ciclo en RoboDK son:
- Establezca la velocidad y la aceleración de las articulaciones de su robot con la mayor precisión posible.
- Agregue redondeo a cualquier movimiento de robot relevante (ver más abajo).
- Tenga en cuenta los retrasos y las pausas en el programa del robot. El software también los agregará al tiempo del ciclo.
- Mueva su robot a la posición de inicio deseada. Esto asegura que RoboDK no agregue un movimiento innecesario al inicio del cálculo.
- Ejecute el programa del robot por completo. Cuando finalice el programa, verá el tiempo de ciclo estimado en la esquina inferior derecha de la pantalla.
¡Simple!
¿Qué tan precisa es la estimación del tiempo de ciclo de RoboDK?
Por las razones explicadas anteriormente, la estimación del tiempo de ciclo no puede ser completamente precisa. No puede decirle el tiempo de ciclo exacto que logrará en el robot físico.
En las pruebas que hemos realizado, es común que el tiempo de ciclo tenga una precisión de alrededor del 95-99 % en comparación con ejecutar la misma tarea en el robot físico. Esto suele ser más que suficiente para comenzar a optimizar su tarea de robot.
Cuanto más precisa sea su simulación, más precisa será la estimación del tiempo de ciclo.
Herramienta adicional:Estudio detallado del tiempo de ciclo
Hay una herramienta adicional en RoboDK que le brinda información útil adicional sobre el tiempo de ciclo de su tarea.
Cuando vaya al menú Herramientas y seleccione "Ejecutar secuencia de comandos", verá las siguientes 3 herramientas:
- Estudio del tiempo del ciclo — Esto le ayuda a elegir las mejores velocidades conjuntas para su robot. Le brinda una comparación detallada de las diferentes velocidades lineales y articulares de su robot, con el tiempo de ciclo estimado para cada una con su programa actual.
- Visualización de tiempo de ciclo — Esto muestra el tiempo de ciclo de su robot actual según lo calculado anteriormente para un programa de robot específico.
- CicloTiempoMostrarTodo — Esto muestra las estimaciones de tiempo de ciclo para todos los programas de robot en su árbol de proyecto actual.
3 formas inteligentes de optimizar el tiempo de ciclo del robot
Ahora que conoce el tiempo de ciclo de su robot, ¿cómo puede optimizarlo?
Aquí hay 3 excelentes maneras de optimizar el tiempo del ciclo:
1. Agregue redondeo a los movimientos de su robot
El redondeo es un método para reducir este arranque y parada haciendo que el robot se mueva a lo largo de una ligera curva en lugar de ir a la esquina. Esto reduce el tiempo de ciclo. Solo debes usarlo para rutas en las que no necesites un movimiento muy preciso.
Cada vez que su robot se mueva a una esquina de un movimiento, tendrá que detenerse y reiniciar su movimiento. Por ejemplo, para un robot que sigue un camino cuadrado, se detendrá en cada una de las esquinas del cuadrado.
2. Optimice la velocidad y la aceleración del robot
Hay un delicado equilibrio entre la velocidad y la aceleración del robot. Cambiar uno de ellos, o ambos, puede tener un impacto significativo en la duración de su ciclo.
La velocidad y las aceleraciones son diferentes para cada modelo de robot. Experimente con diferentes velocidades y aceleraciones para encontrar la mejor configuración para su robot y tarea.
3. Realice un seguimiento de las métricas y mejore continuamente
La mejor manera de optimizar algo es realizar un seguimiento y mejorarlo continuamente con el tiempo. Esto requiere que elijas las métricas correctas.
La primera métrica a seguir al optimizar su tarea de robot es el "tiempo de ciclo" en sí mismo. Para cada cambio que realice en el programa del robot, anote su efecto en el tiempo del ciclo. Con el tiempo, también puede realizar un seguimiento de métricas como "número de ciclos por día" o "ciclos completados".
Vea nuestro entrenamiento gratuito sobre Robot Cycle Time
¿Quiere ver cómo utilizar la función de RoboDK para mejorar su propia célula robótica?
Puede aprender aún más en nuestro video de capacitación gratuito. En la lección de tiempo de ciclo, descubrirá el proceso de principio a fin.
Puedes ver la lección del tiempo del ciclo aquí.
En primer lugar, es una buena idea ver primero la lección sobre redondeo y la lección sobre aceleración de robots.
¿Qué preguntas tienes? Cuéntanos en los comentarios a continuación o únete a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK. Además, mira nuestra extensa colección de videos y suscríbete al canal de YouTube de RoboDK
Robot industrial
- ¿Cómo obtener la fecha y hora actuales en Python?
- Cómo optimizar los sistemas de fabricación y ahorrar tiempo
- Cómo crear y optimizar un programa de mantenimiento preventivo
- Cómo optimizar su programa de MP
- El qué, el por qué y el cómo de Wrench Time
- Documento técnico:Cómo encontrar el potencial de su robot
- Cómo calcular y mejorar la disponibilidad de la máquina
- ¿Cómo elegir su máquina industrial?
- Cómo optimizar su fabricación y envío
- Cómo reducir el tiempo de capacitación para la soldadura robótica
- ¿Cómo sé si es hora de comprar un robot?