


¡Kravox! Instrumento inalámbrico, sensor de movimiento y táctil
Componentes y suministros
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 5 | ||||
 |
| × | 2 | |||
| × | 2 | ||||
 |
| × | 3 | |||
| × | 5 | ||||
| × | 3 | ||||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
| ||||
| ||||
| ||||
| ||||
| ||||
| ||||
 |
| |||
|
Aplicaciones y servicios en línea
 |
| |||
|
Acerca de este proyecto
Un nuevo Tipo de instrumento
Kravox ha sido creado como parte de un proyecto de investigación en la Universidad de Lund (Suecia) con el objetivo de dar a los controladores de instrumentos musicales digitales la sensación de instrumentos mecánicos convencionales.
Ahora Kravox será accesible para todos y servirá como una plataforma de experimentación musical, por lo que este tutorial detallado ha sido creado para permitir que tantas personas como sea posible utilicen este nuevo y emocionante instrumento.
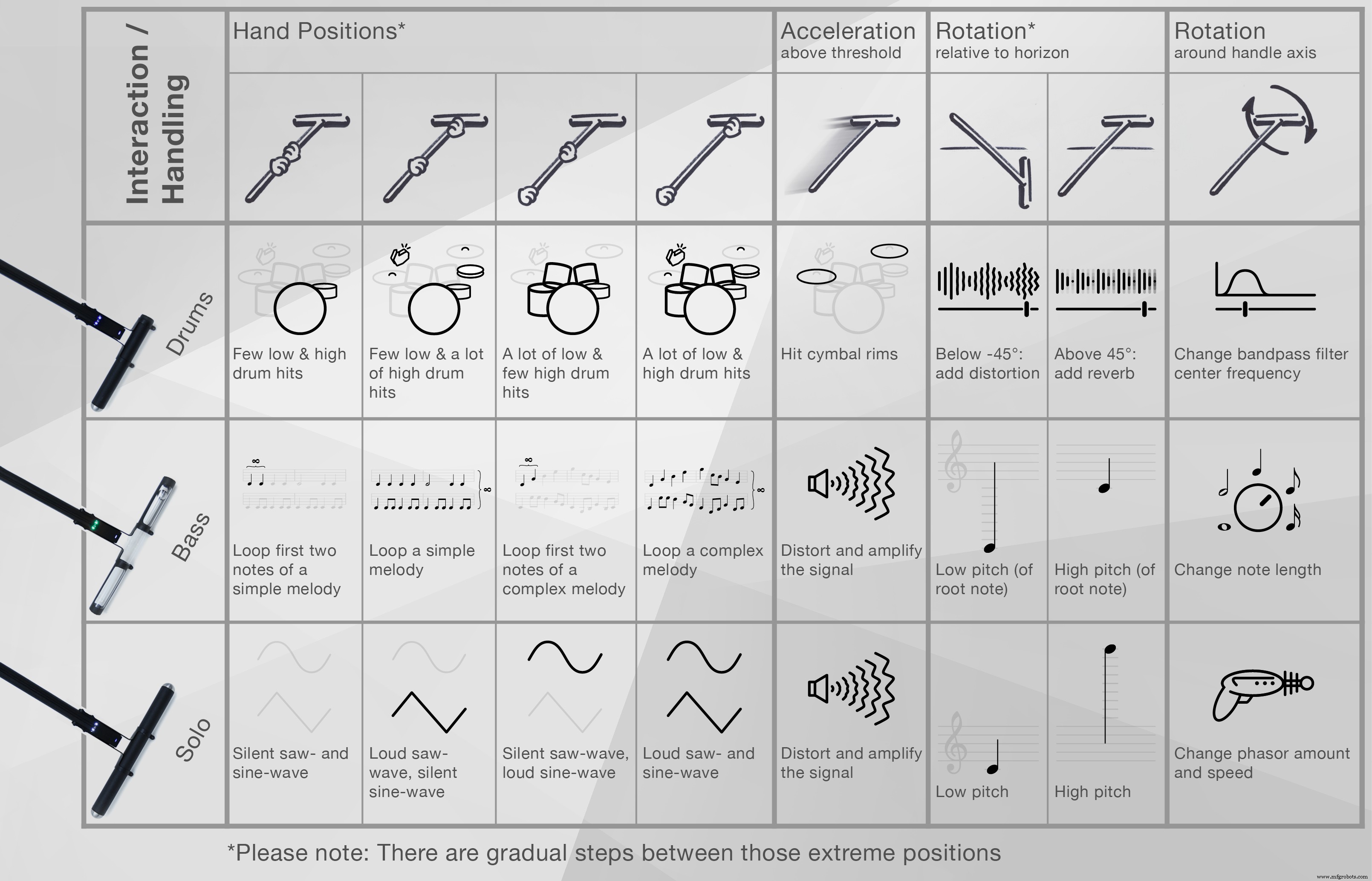
Cómo jugar Kravox
Jugar a Kravox es bastante sencillo. Solo imagina que estás jugando con un objeto común como una escoba y la forma en que lo tocas y lo mueves por el espacio controla cómo se genera el sonido. Vea y escuche cómo jugar Kravox en este video.
¿Qué es Kravox?
Kravox es un instrumento musical digital de código abierto compatible con plataformas cruzadas que consta de tres componentes:controlador (es), receptor y software.

Controlador / es
Se pueden conectar hasta tres dispositivos de control inalámbrico. Cada controlador procesa datos de orientación y aceleración de un giroscopio digital MPU-6050 y datos táctiles de dos placas de sensores táctiles MPR121 conectadas a un Arduino Nano. El controlador envía los datos a un dispositivo receptor a través del transceptor de radio nRF24L01.
Si se utilizará más de un controlador, el segundo y tercer controlador deben obtener direcciones individuales asignadas. Para obtener más información sobre la asignación de la dirección, consulte la información en la sección DECLARACIONES / NRF24L01 del código del controlador.
Receptor
El receptor pasa los datos recibidos del controlador o controladores a través de USB a una computadora conectada, junto con los datos recopilados de varios potenciómetros. El código del dispositivo receptor proporcionado permite la comunicación con hasta tres controladores, pero también funcionará con solo uno o dos sin ajustes.
Software
Los datos del receptor se procesan en un programa escrito en Pure Data Vanilla que emite sonido.
Qué crearemos en este tutorial:guía paso a paso

La belleza de Kravox es que se puede ajustar su forma, cómo suena y cómo se toca. Esto me dio la oportunidad de diseñar una versión de Kravox fácil de replicar para este tutorial.
(En caso de que sienta curiosidad:en mi canal de youtube también puede encontrar un timelapse de cómo hice la versión más grande de Kravox)
Tanto el video anterior como este tutorial le mostrarán todos los pasos necesarios para construir controladores y un receptor completamente funcionales a partir de componentes eléctricos y cartón fácilmente disponibles.
Parte 1:Recopilación de componentes y herramientas
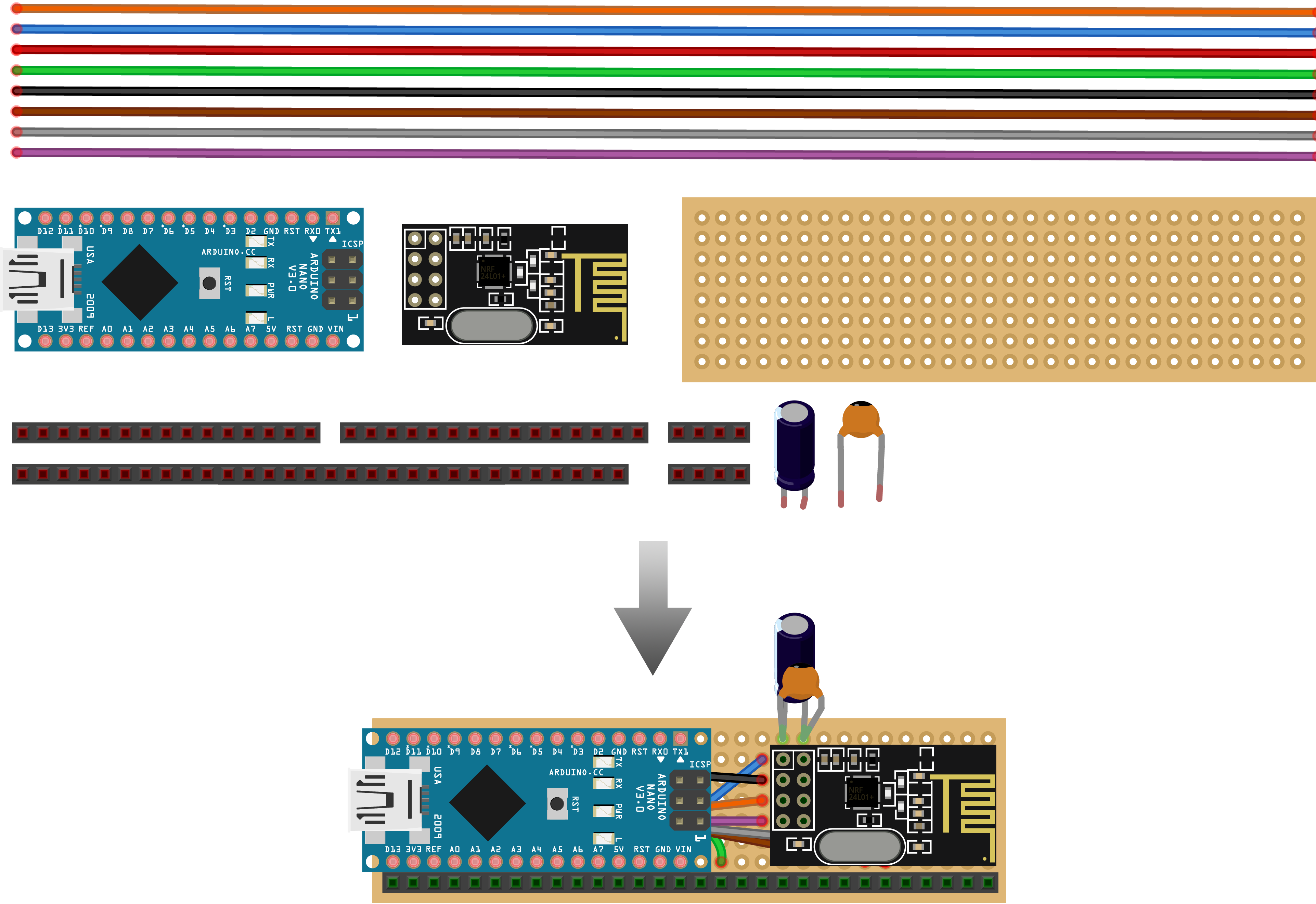
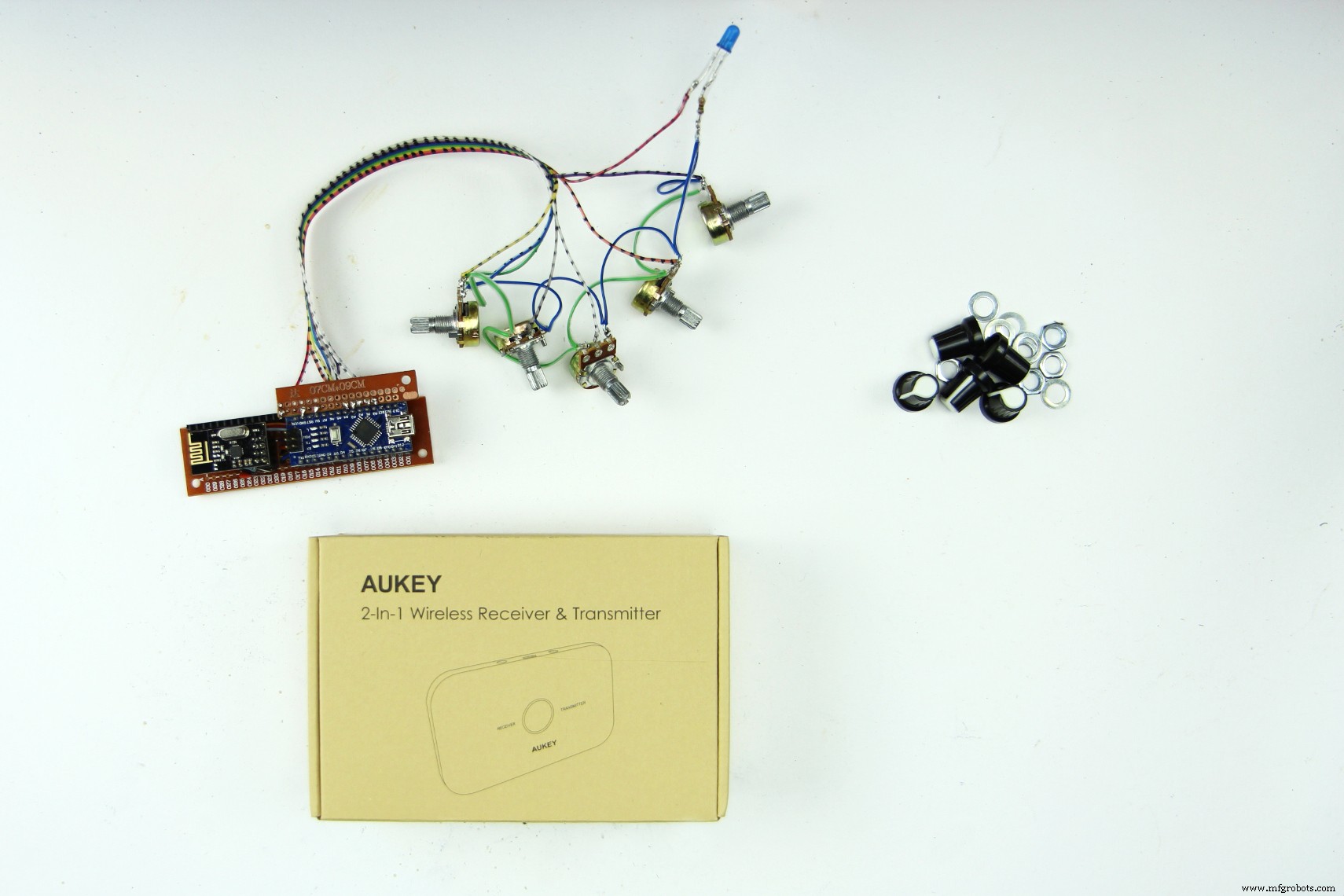
Necesitará los siguientes componentes para construir un controlador Kravox + estación receptora:

{1x} Tablero perfilado de 50 * 24 orificios (tamaño mínimo), {5x} conectores hembra de 40 pines, {5x} conectores macho de 40 pines, {5x} potenciómetros de 10 kiloohmios y perillas para ellos, {3x} estándar azul de 5 mm LED, {3x} resistencias de 150 ohmios, {2x} condensadores de 10 micro-faradios, {2x} condensadores de 100 nano-faradios, {2x} transceptores de radio NRF24L01, {2x} nanos Arduino, {3x} resistencias de 220 ohmios, {2x} Placas de sensor táctil MPR121, {1x} giroscopio digital GY-521 MPU 6050, {2x} cables USB-A a USB-C, {1x} 4 metros (mínimo) de cinta de cobre de 1 cm de ancho, {1x} powerbank, {2x } 7 metros (mínimo) de cable en muchos colores y, opcionalmente, {1x} 0, 2 metros de tubo retráctil de ø =3 mm.
Además, necesita herramientas para ensamblar los componentes:
y posteriormente también unas cajas de cartón vacías o similar:

Y pegamento, una pistola de pegamento, cinta adhesiva, una o más abrazaderas y bandas de goma para hacer los cerramientos:

Parte 2:Fabricación de la placa controladora
A continuación, explicaré cómo hacer la electrónica del controlador paso a paso a partir de las partes mencionadas anteriormente
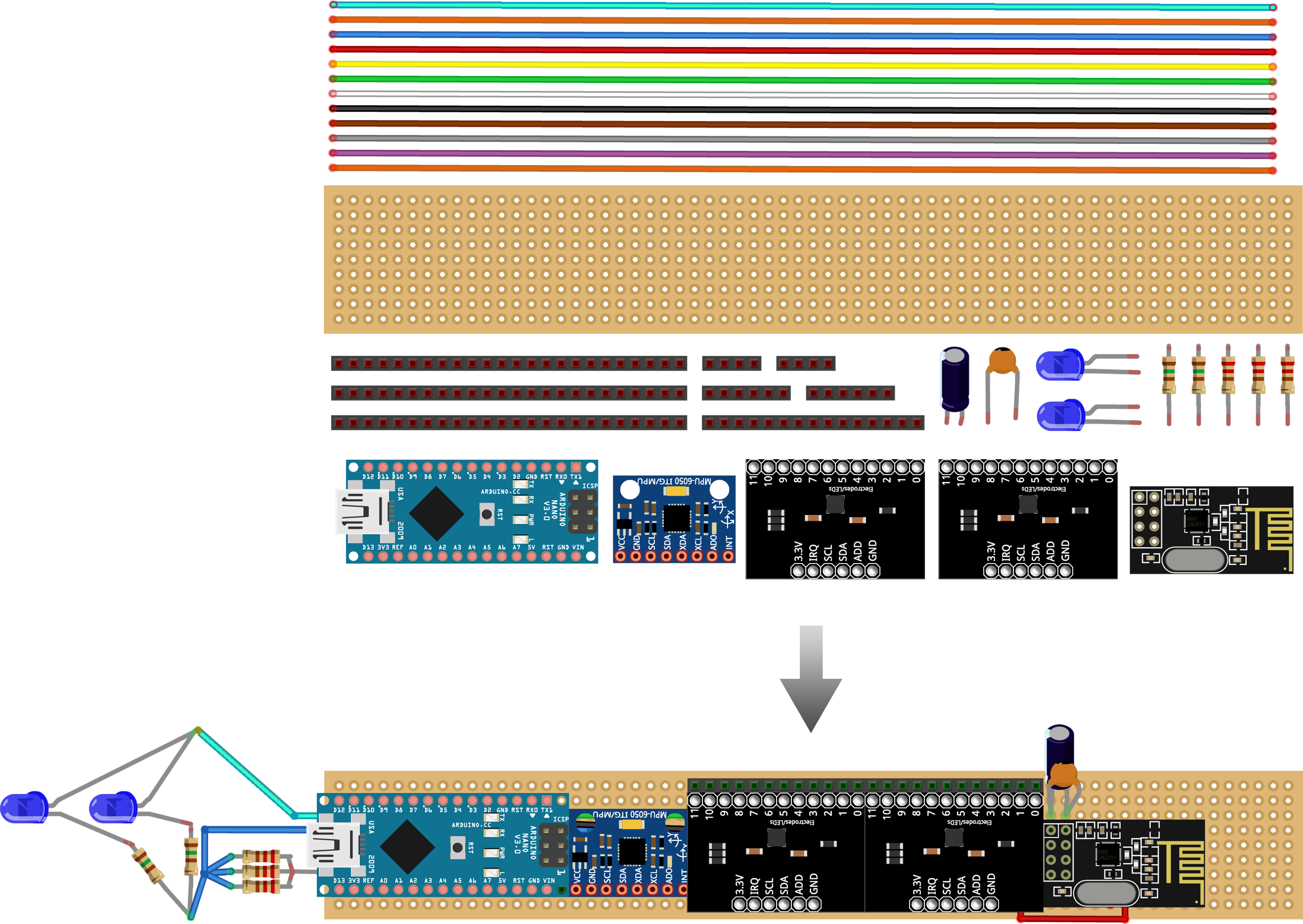
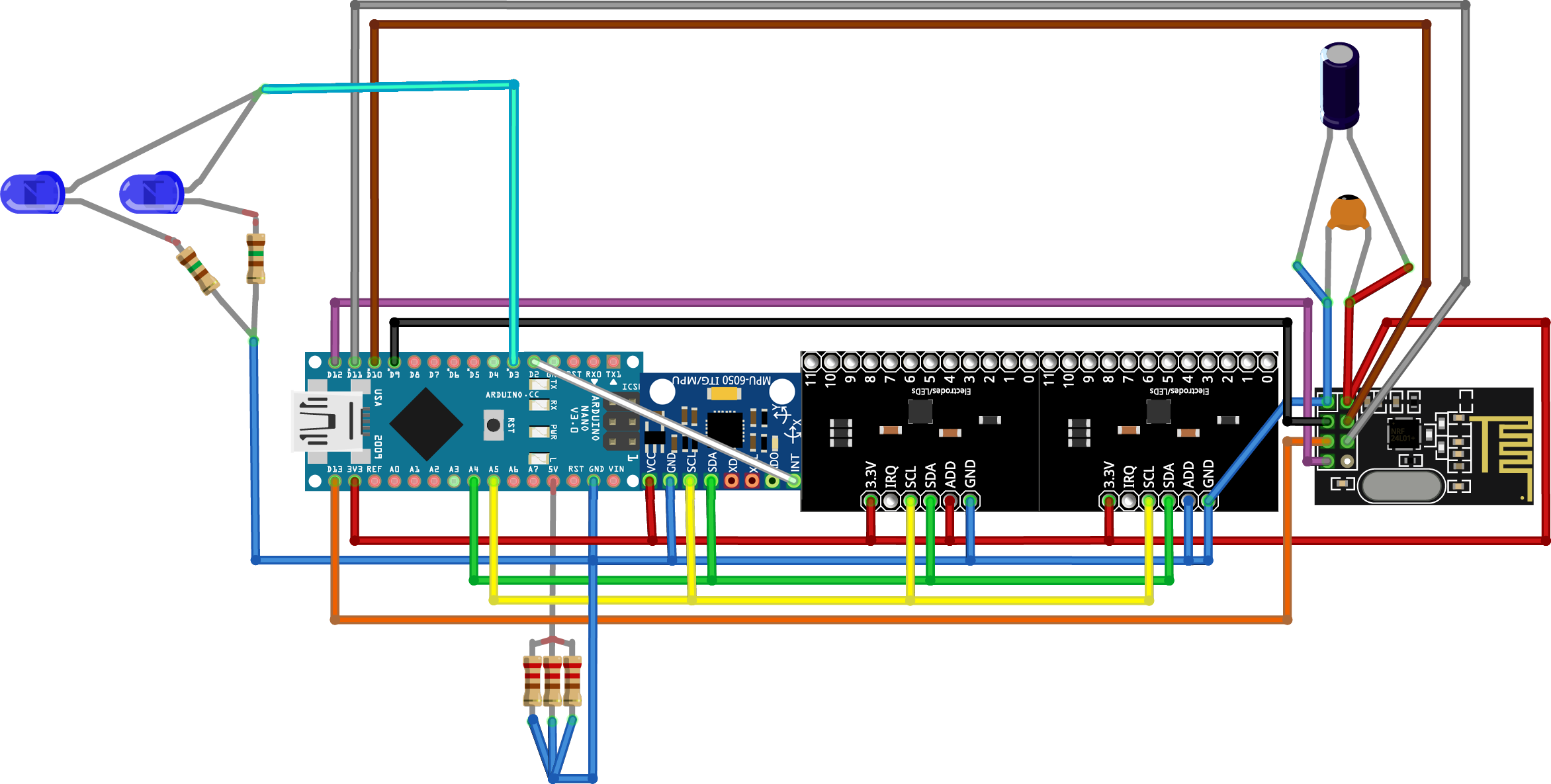
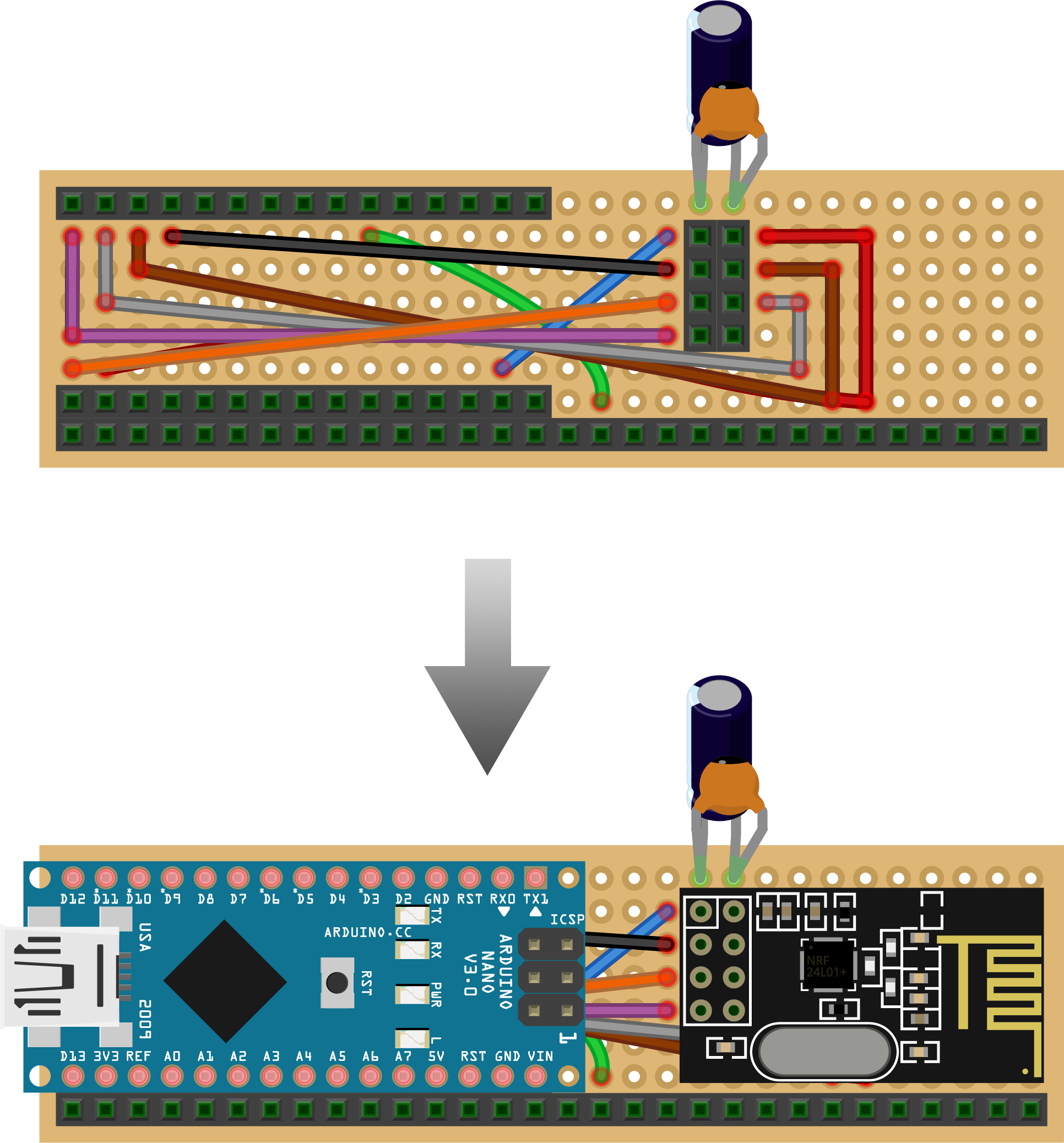
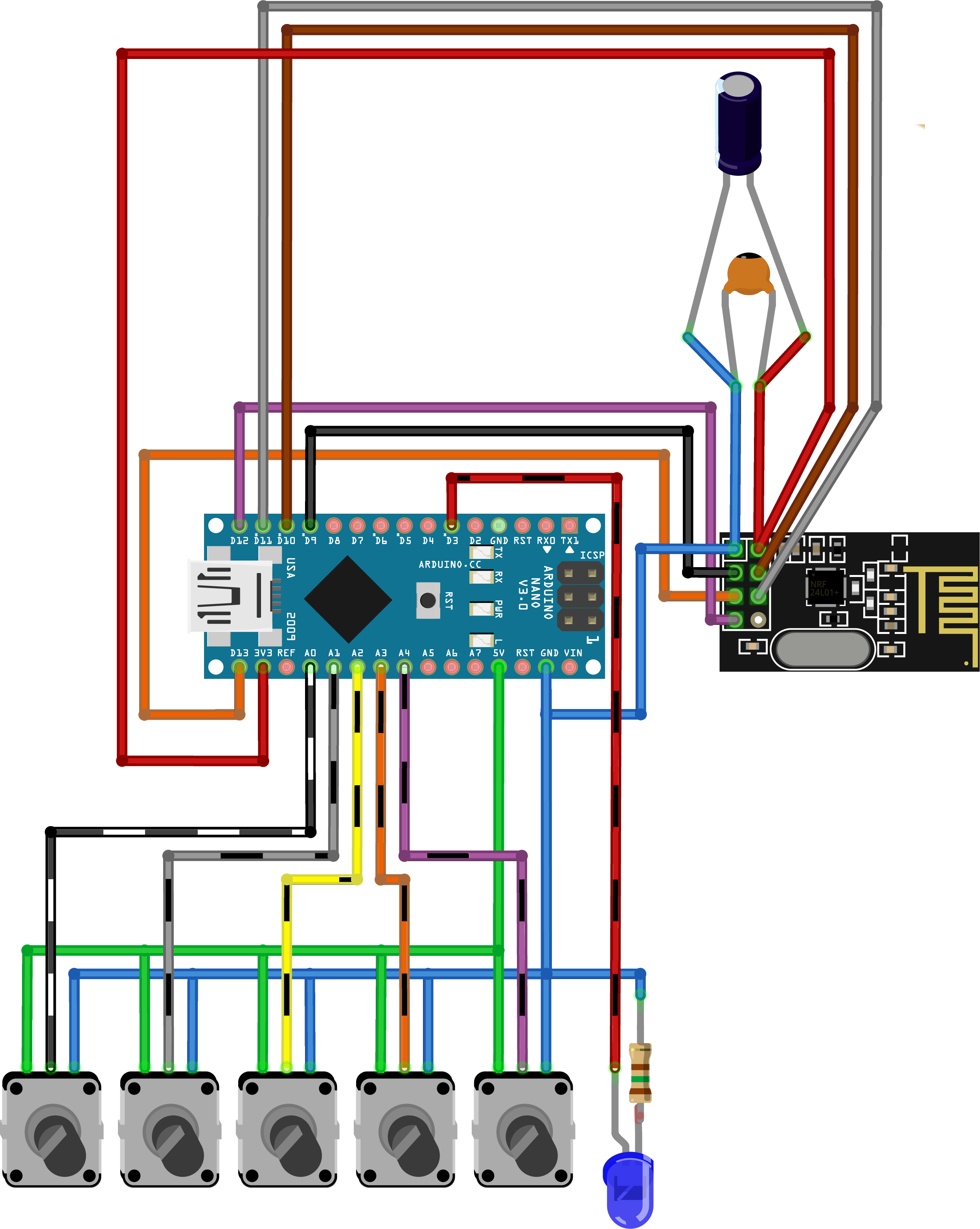
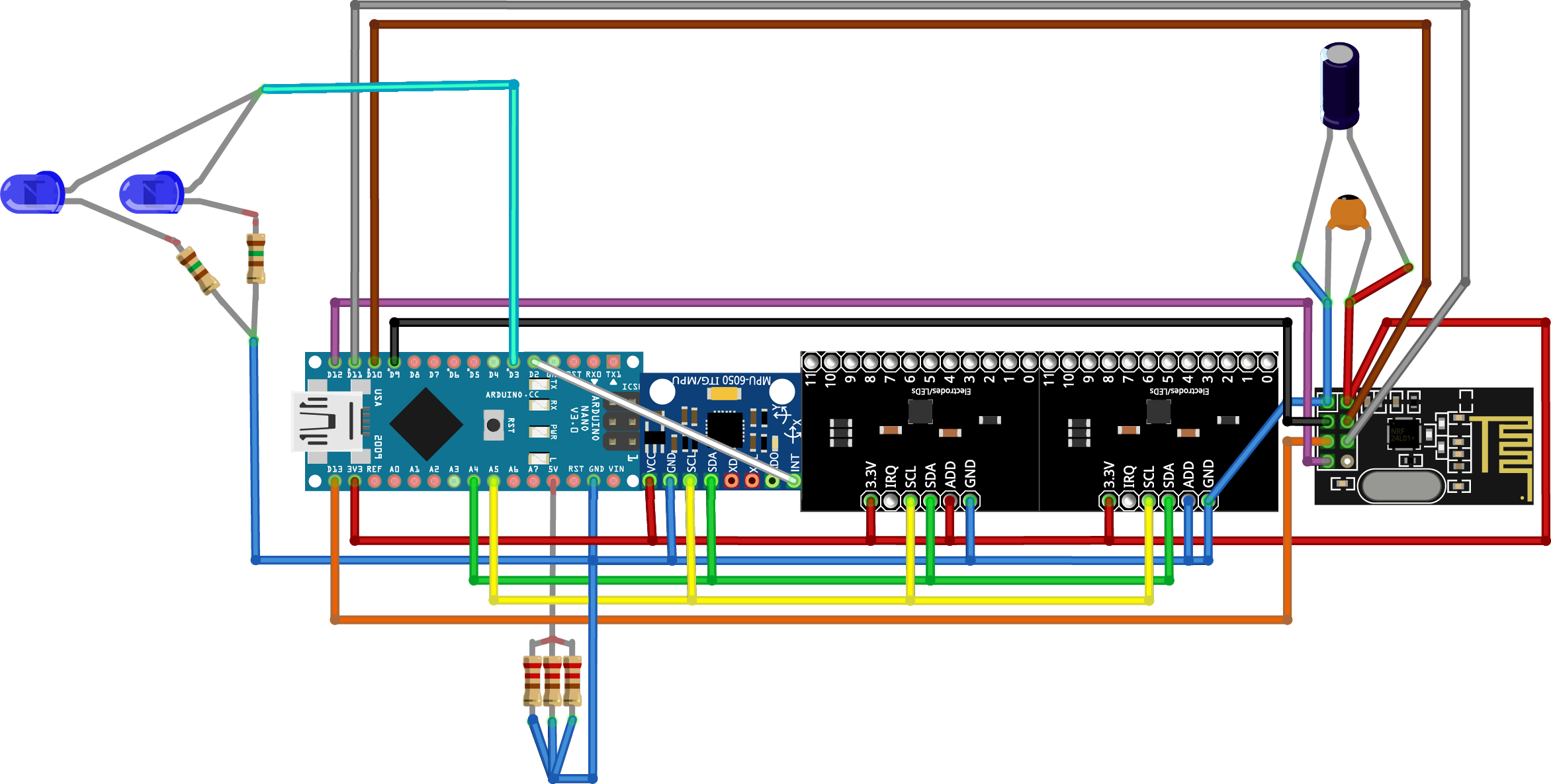
En caso de duda sobre dónde soldar un cable, siempre puede volver al diagrama de circuito a continuación y verificar si los componentes estarán conectados correctamente, una vez que conecte el arduino y las placas de sensores a la placa de circuito que estamos creando.
2.1
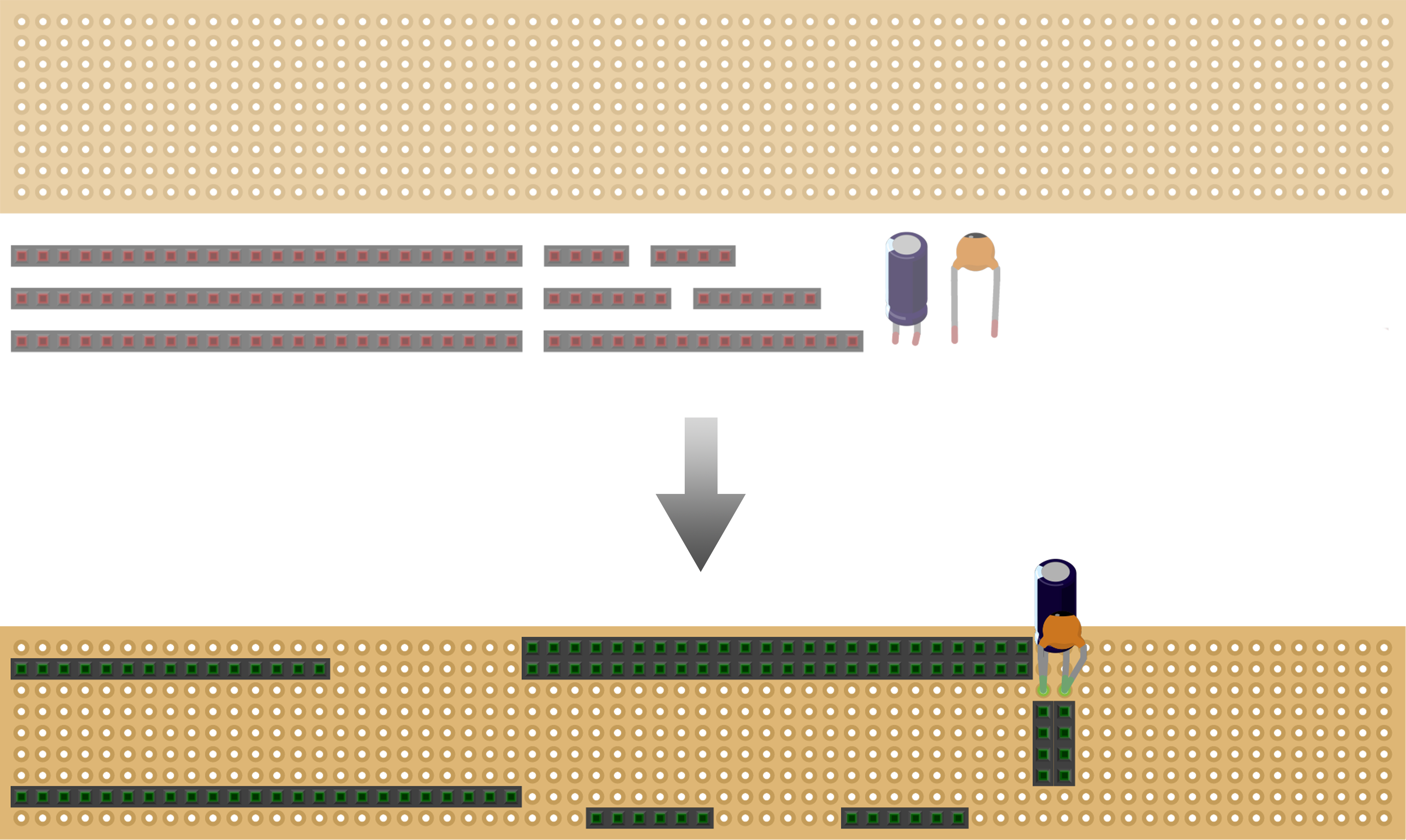
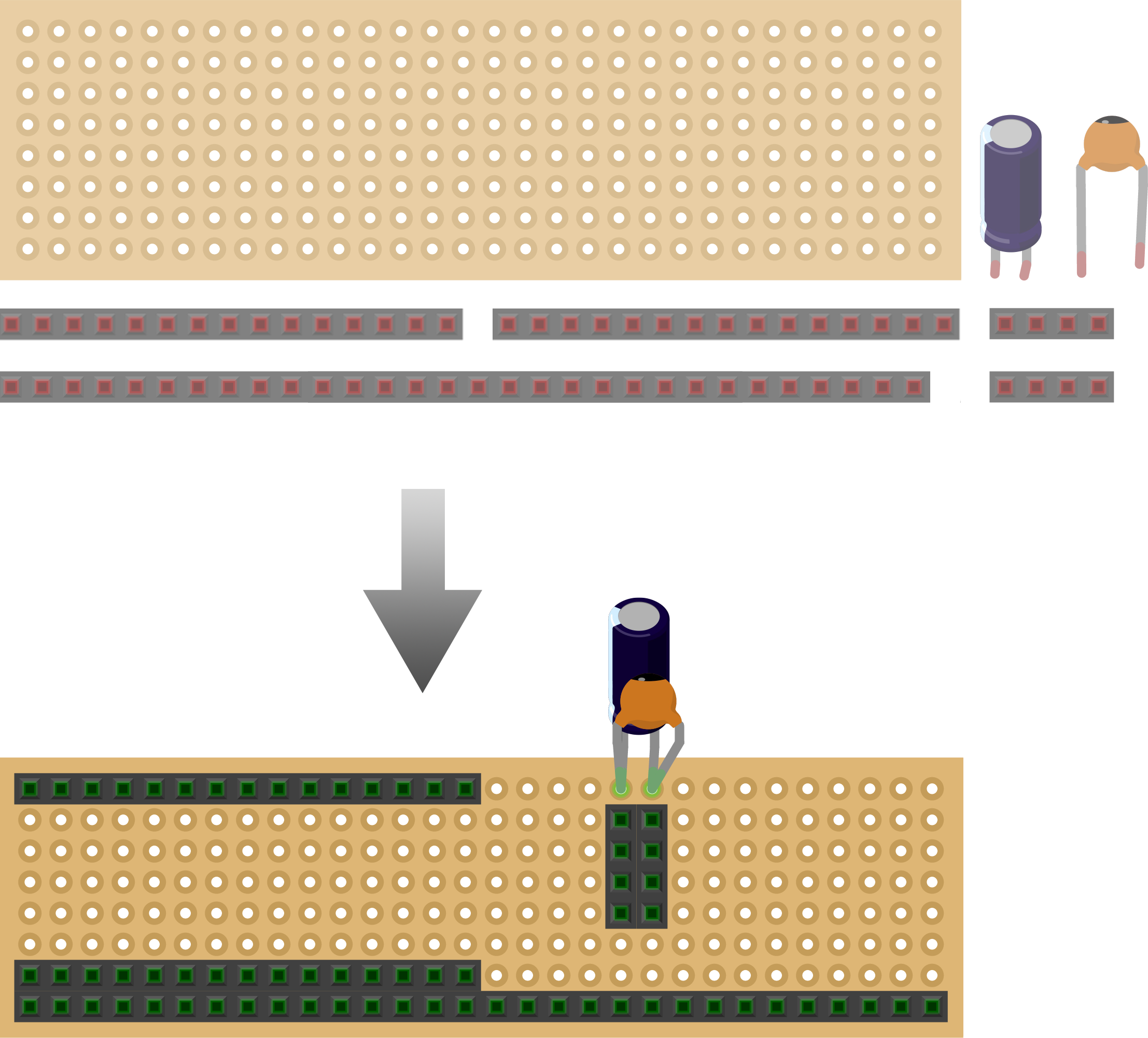
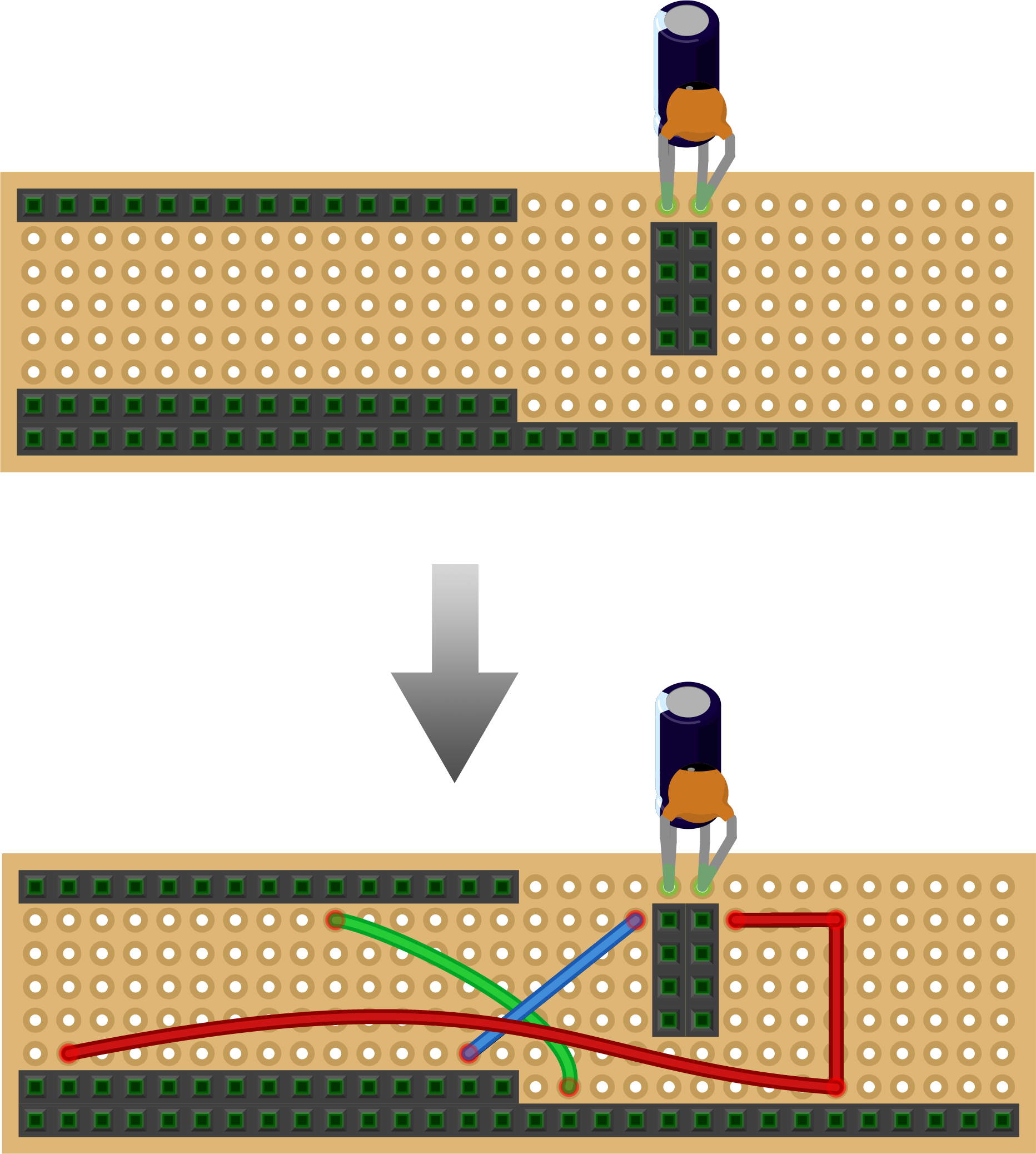
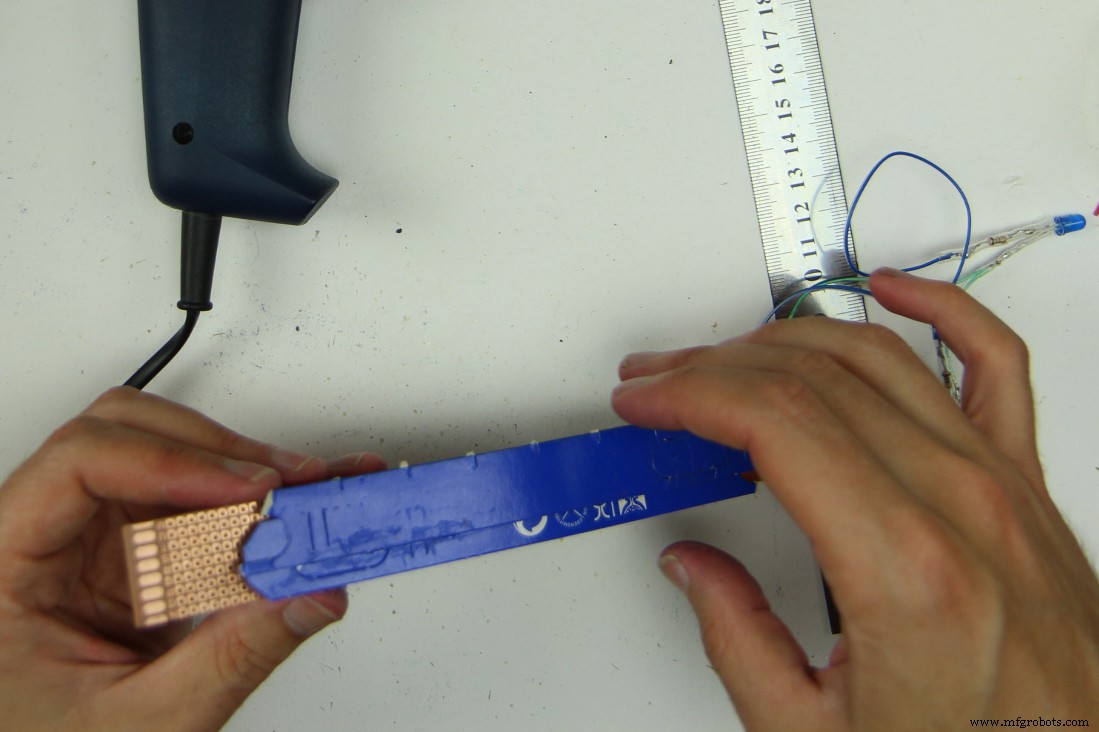
El primer paso es cortar la placa de perforación y los conectores hembra de los pines al tamaño adecuado y ensamblarlos con un condensador grande y uno pequeño que ayuden a aumentar la confiabilidad del transceptor de radio:
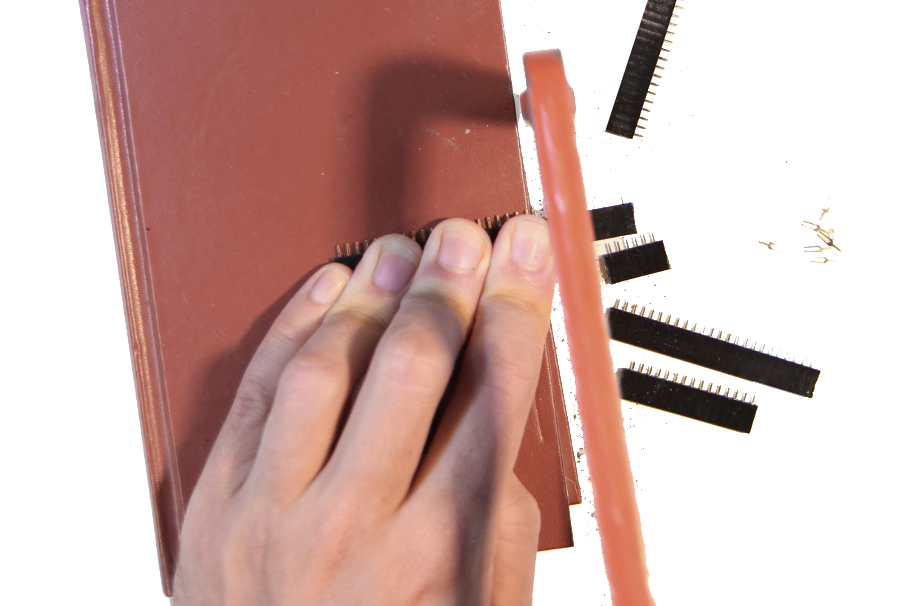
Corta la placa perfilada con una navaja:

Cortar los encabezados de los pines hembra con una sierra de sierra (los puse en un libro para nivelarlos desde la mesa):
Soldar en las piezas. Ya puede conectar cada par de pines de los dos cabezales hembra largos que se encuentran uno al lado del otro. Para los encabezados restantes, es suficiente simplemente unirlos con un poco de soldadura, preferiblemente los pines que, de acuerdo con el diagrama del circuito, no tendrán conexión más adelante de todos modos. Al soldar los condensadores, preste atención a la polaridad del condensador electrolítico de 10 micro-faradios (el más grande de los dos). Un lado tendrá una raya y, por lo general, también una pierna más corta. Ese lado debe estar conectado a tierra. El condensador más pequeño de 100 nanofaradios no está polarizado y se puede soldar de cualquier manera.
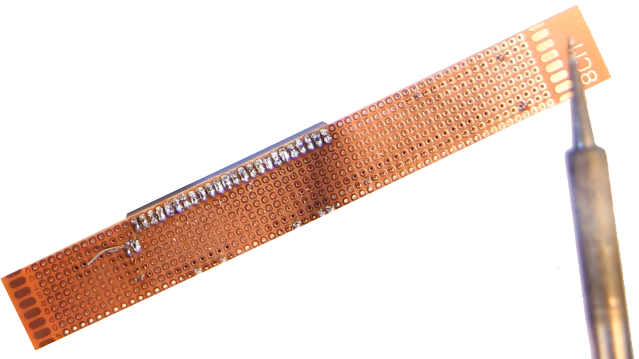
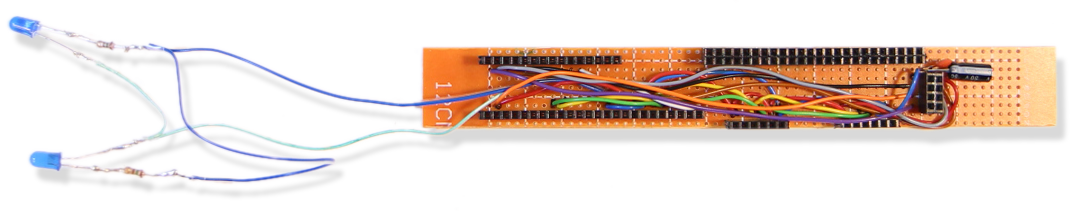
El resultado debería verse similar a esto:

2.2
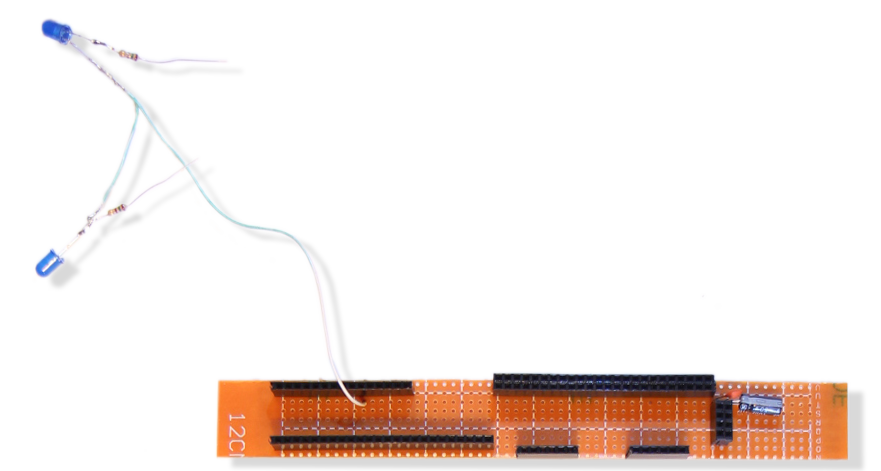
El segundo paso es soldar los dos LED con sus resistencias limitadoras de corriente.
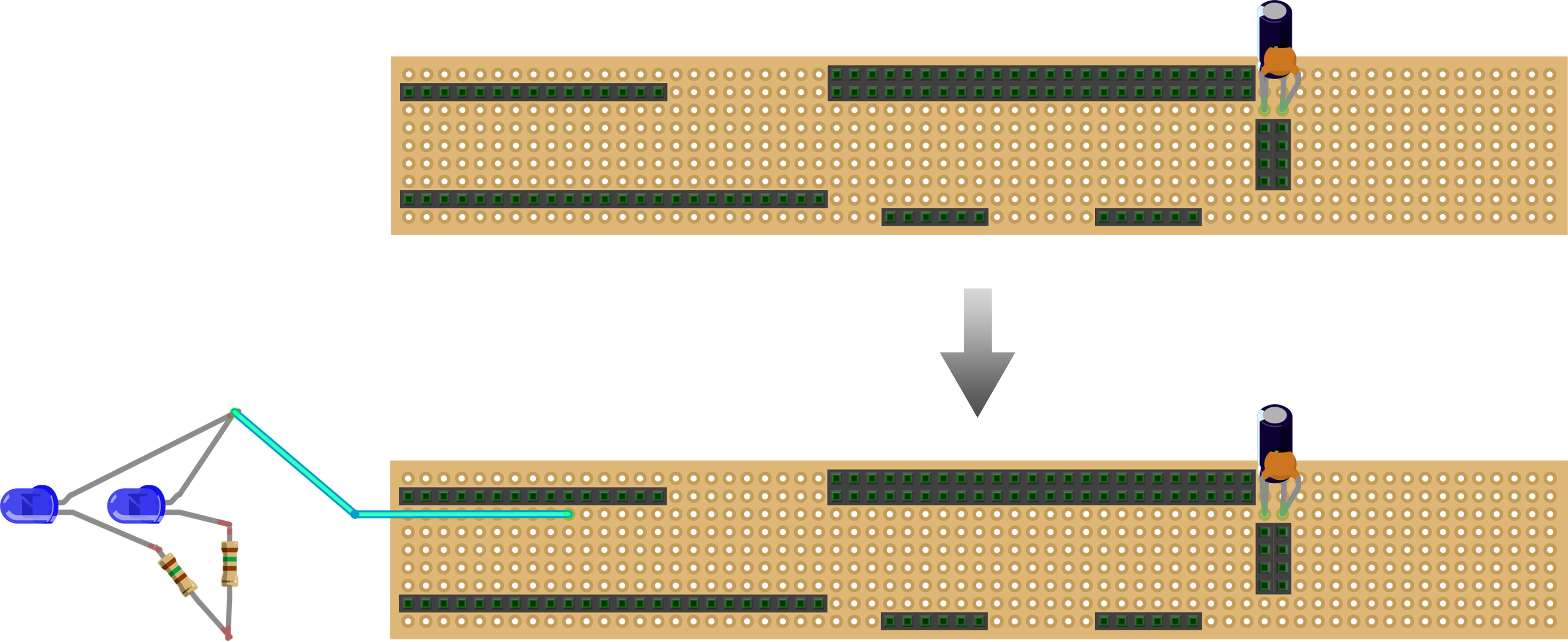
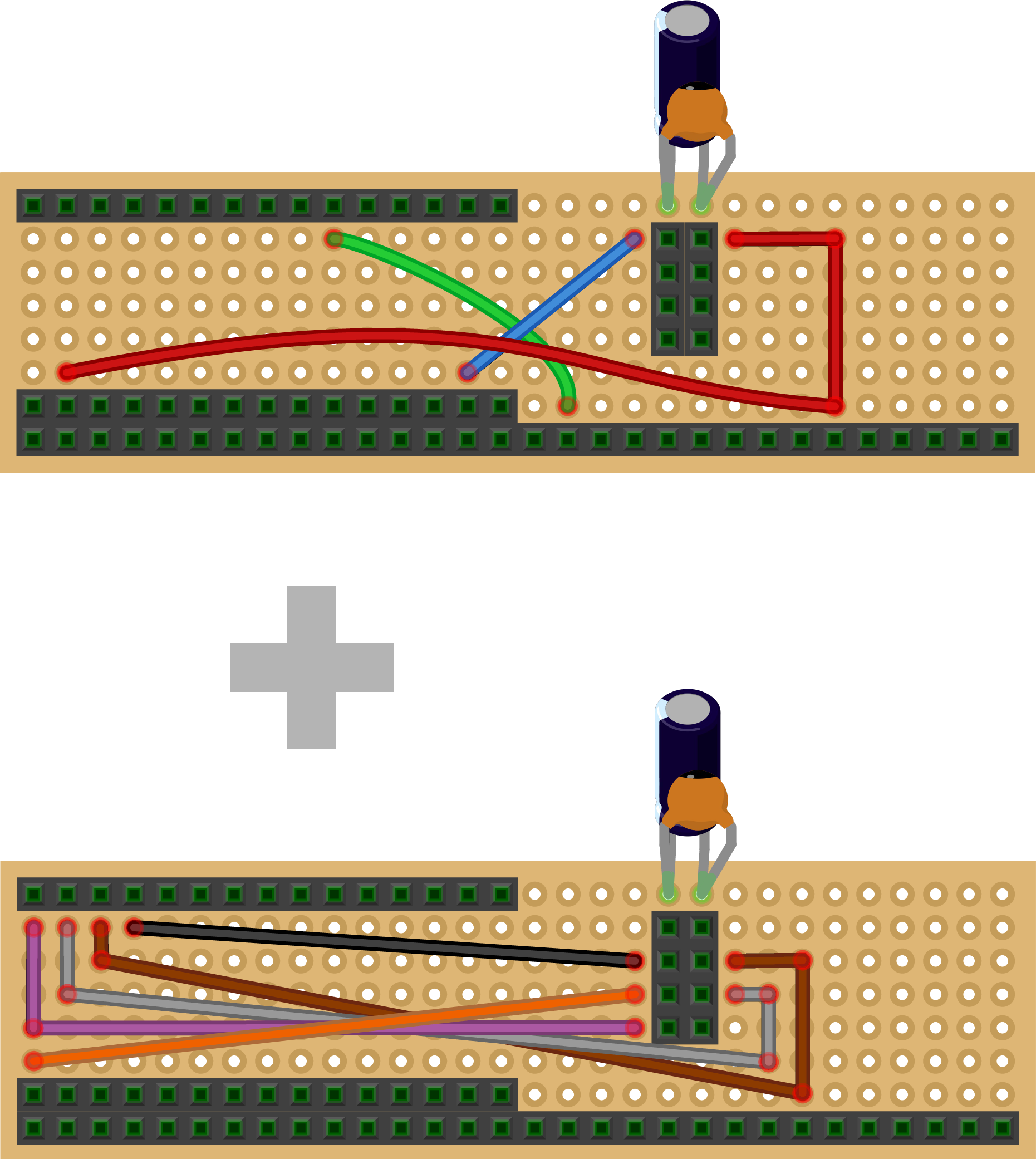
Preste atención a la polaridad del LED:un lado está aplanado y normalmente también tendrá una pata más corta. Ese lado debe estar conectado a tierra en el paso 2.3. El otro lado ahora lo conectaremos con un cable de color cian al conector donde se ubicará el pin D3 de Arduino cuando se conecte:
2.3
A continuación, agregamos todos los cables de alimentación rojo y azul. El rojo es para 3.3 voltios y el azul para tierra (GND)
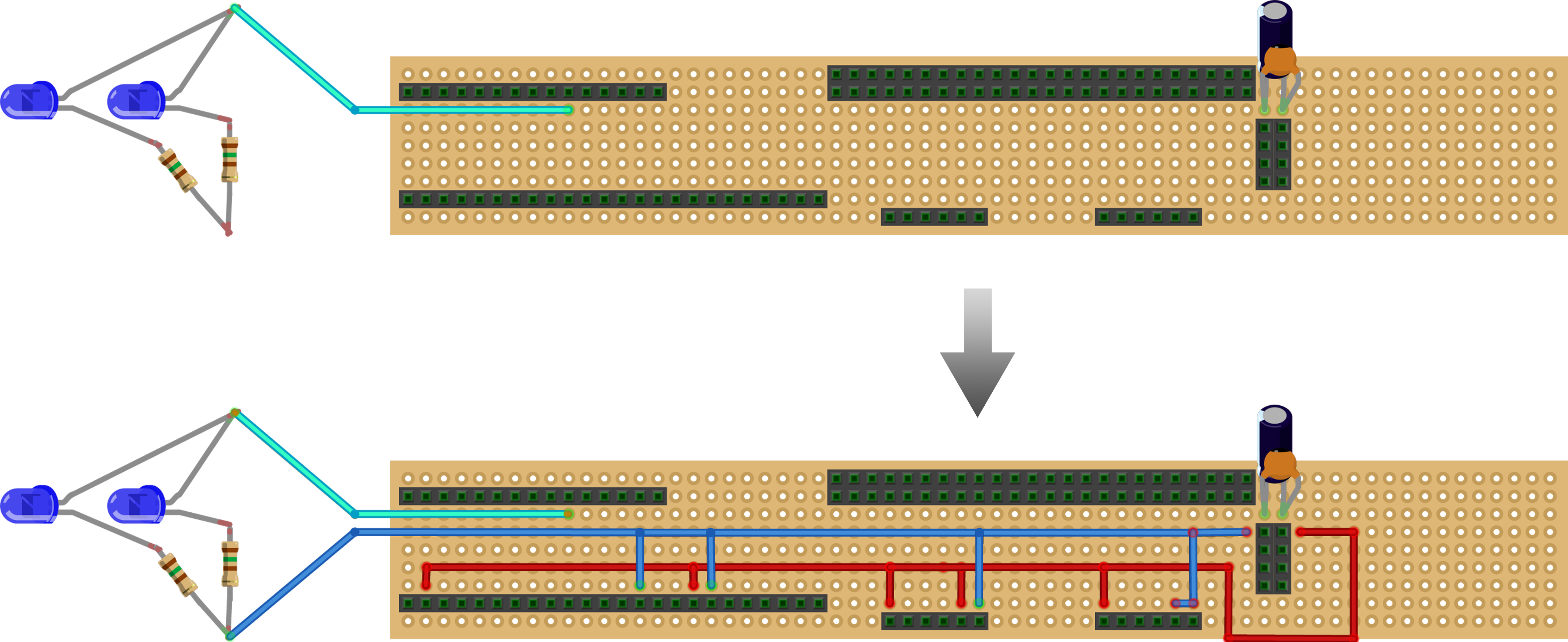
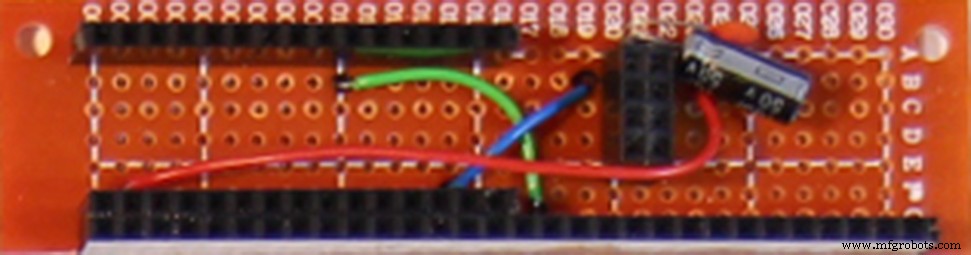
El resultado debería verse similar a esto:
2.4
En el cuarto paso ya está un poco abarrotado en el tablero. Las tres placas de sensores se comunican a través del protocolo I2C (circuito interintegrado). Eso significa que todos se pueden conectar a los mismos dos pines Arduino, por lo que soldamos cables amarillos y verdes entre ellos y los pines Arduino A4 y A5. También agregamos un cable blanco para la conexión del pin de interrupción del giroscopio.
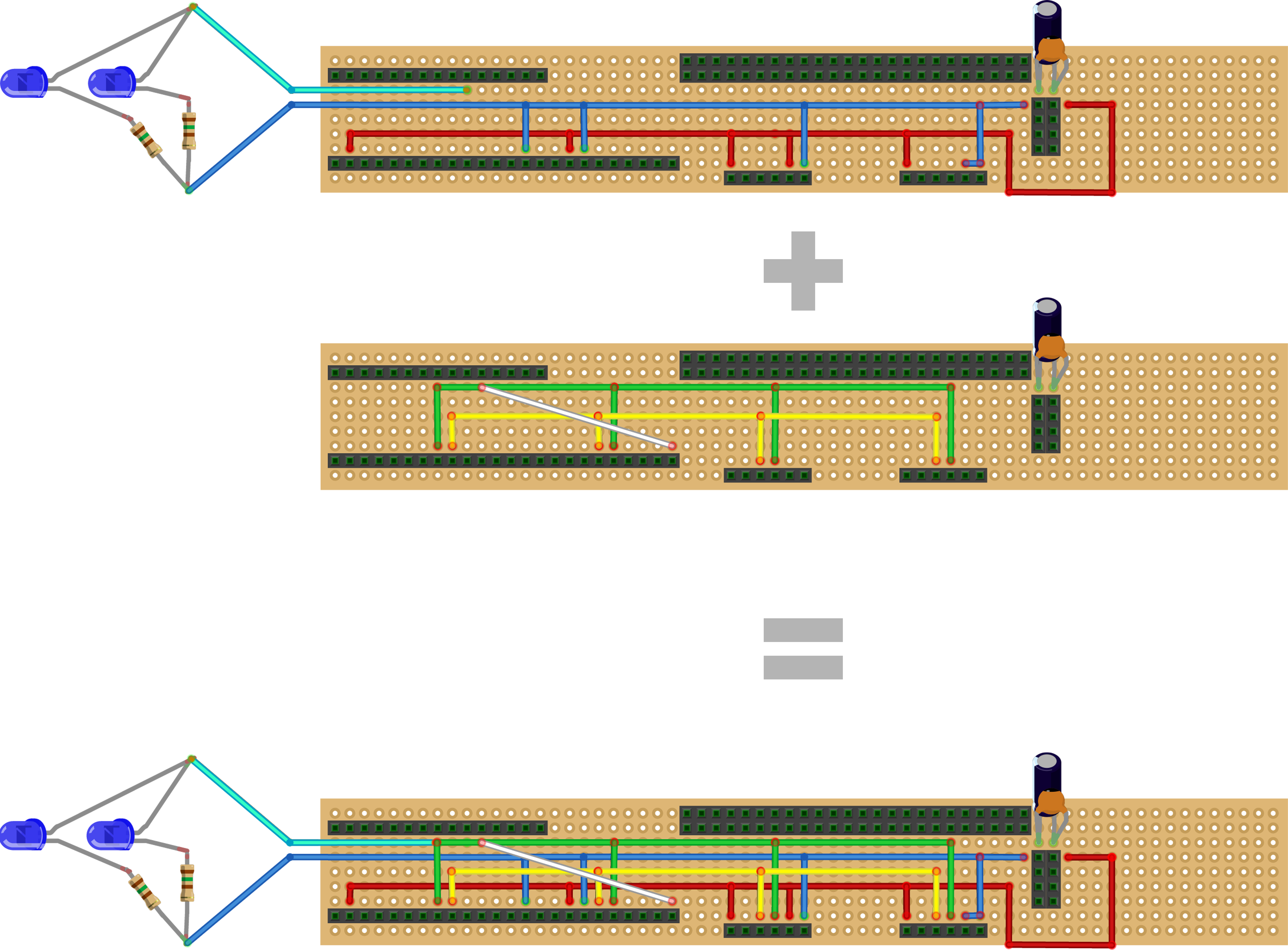
Una vez hecho esto, el tablero se verá así:
2.5
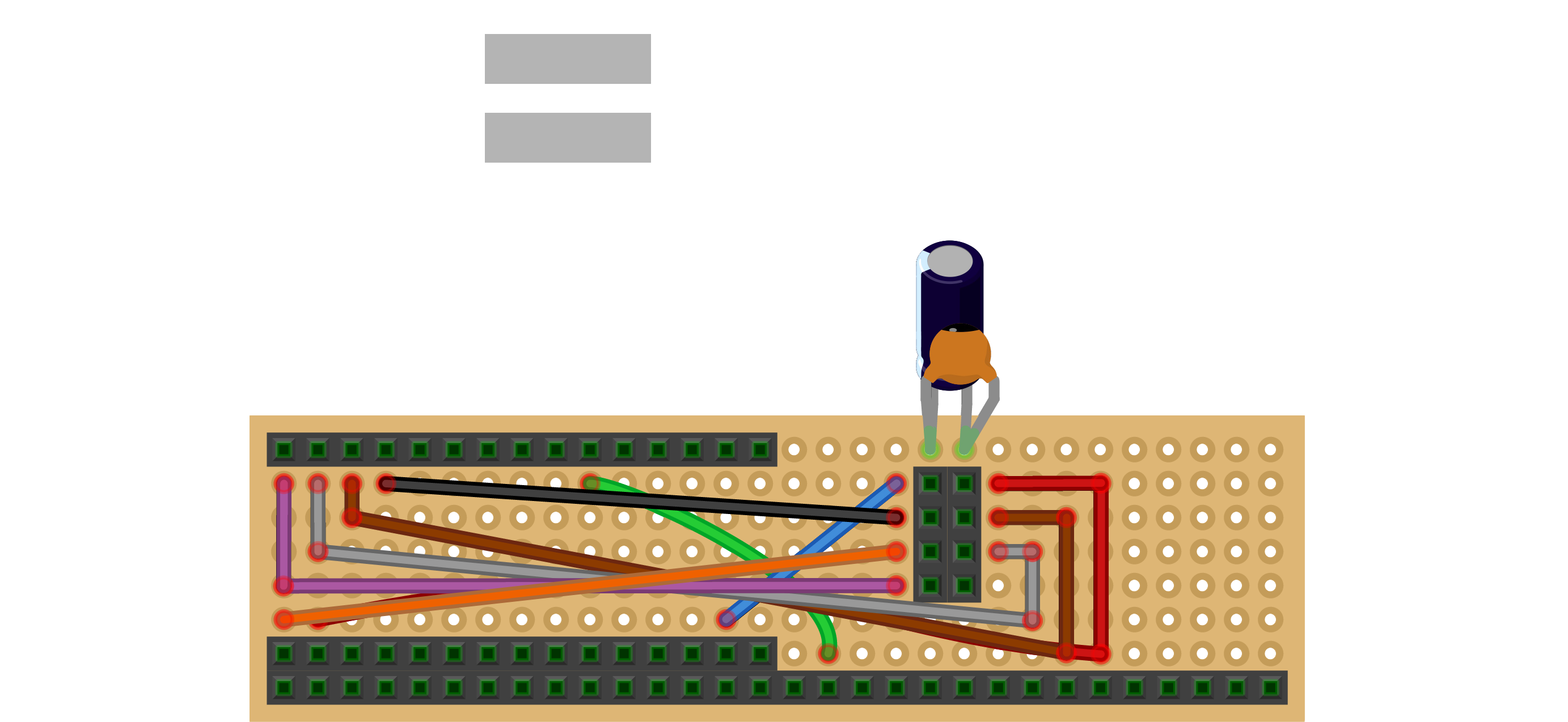
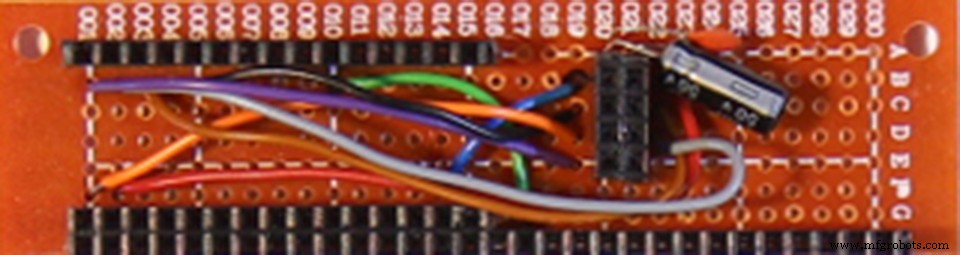
El transceptor de radio se comunica a través del protocolo SPI (interfaz periférica en serie) que requiere más conexiones que I2C, por lo que agregamos cables negros, grises, marrones, morados y naranjas:
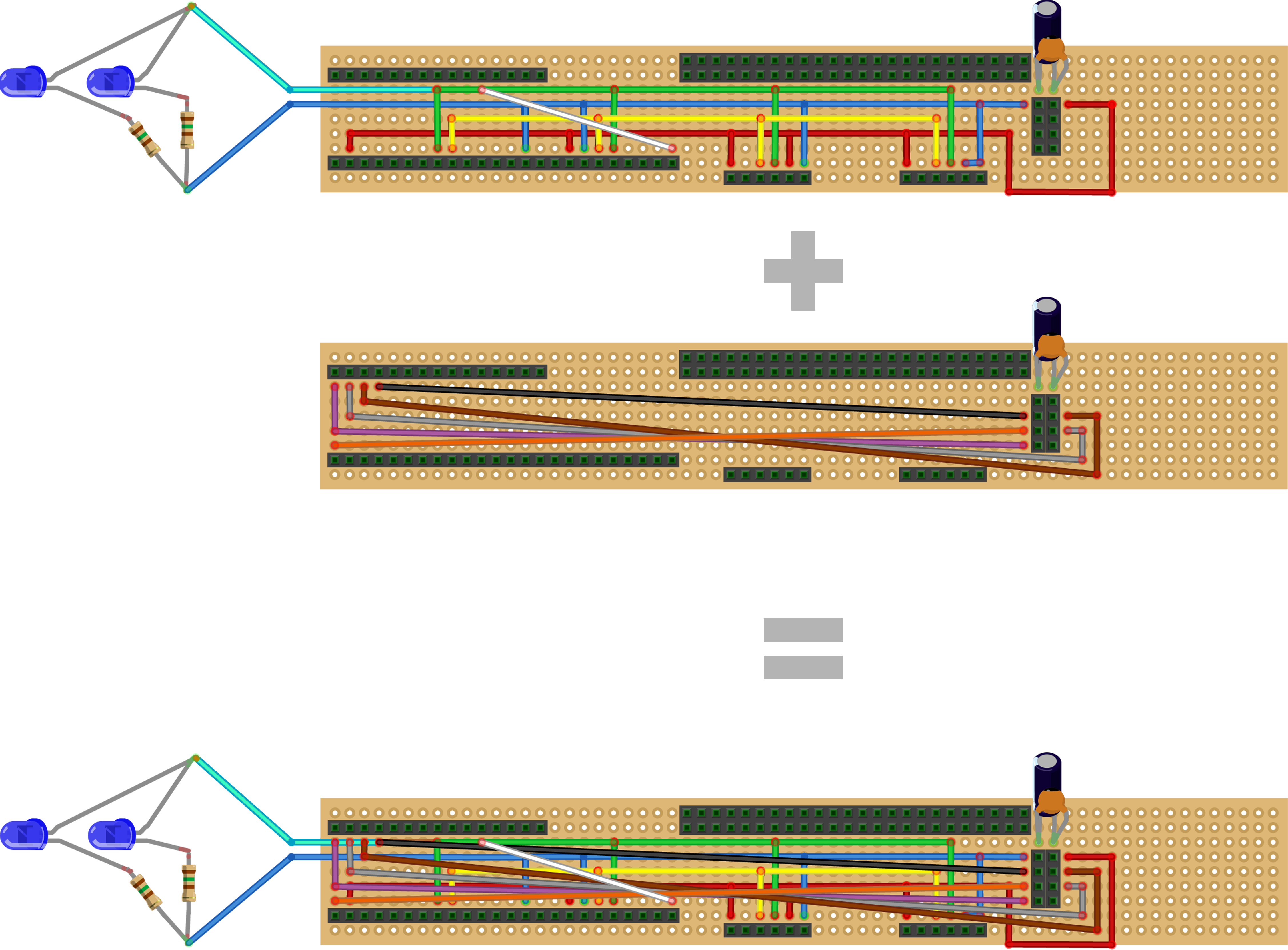
Esto es lo que obtendrá:
2.6
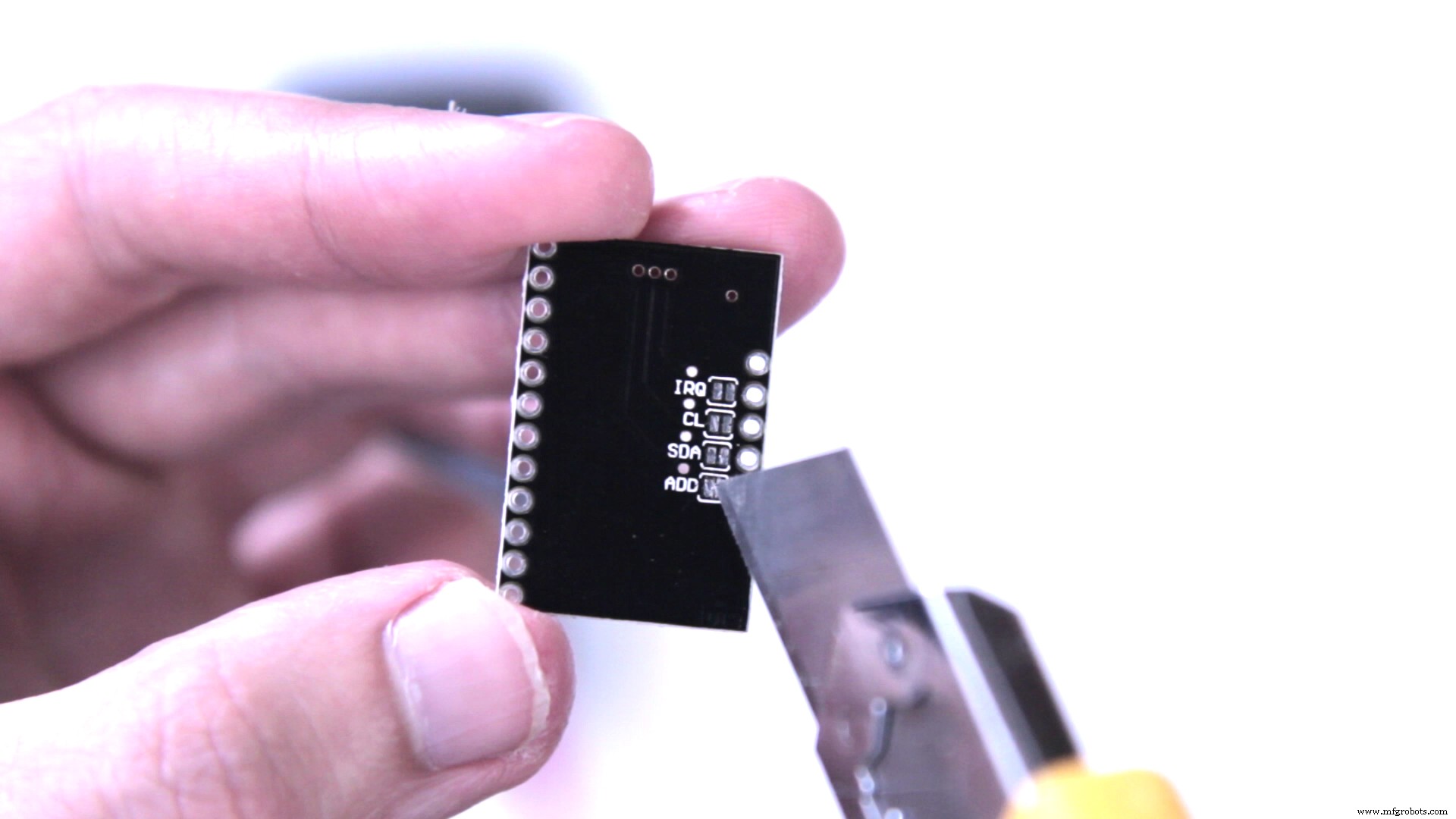
Ahora es el momento de preparar los componentes.
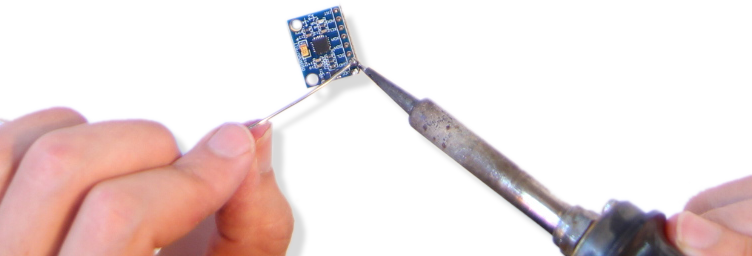
Aparte de soldar en los cabezales de clavija macho si no están soldados previamente, ¡preste especial atención a las placas de sensores táctiles! Los modelos baratos de China tienen su pin de dirección cableado a tierra sin una resistencia de extracción en el medio, por lo que debe cortar físicamente esta conexión en la parte inferior de la placa con un cuchillo. Corte entre las dos almohadillas de soldadura al lado de donde está escrito ADD. Recomiendo usar un multímetro para verificar que no quede ninguna conexión entre las almohadillas después:
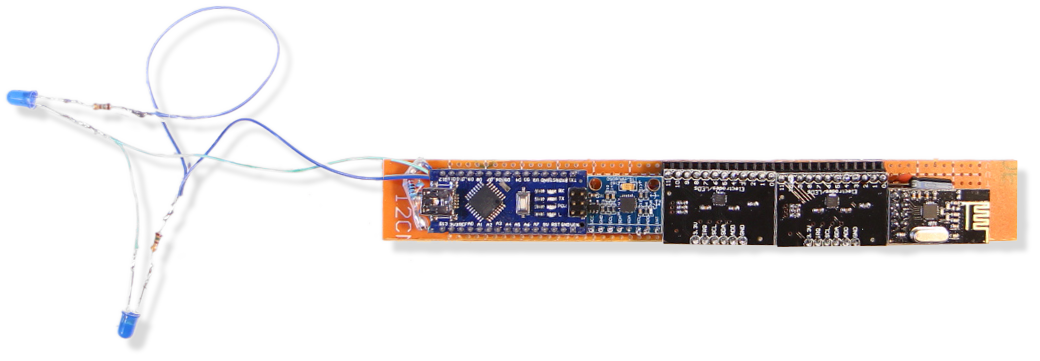
Cuando todos los componentes tienen sus cabezales de clavijas soldados y las placas de sensores táctiles están preparadas, puede conectar el Arduino Nano, el giroscopio, las dos placas de sensores táctiles y el transceptor de radio en la placa del controlador:
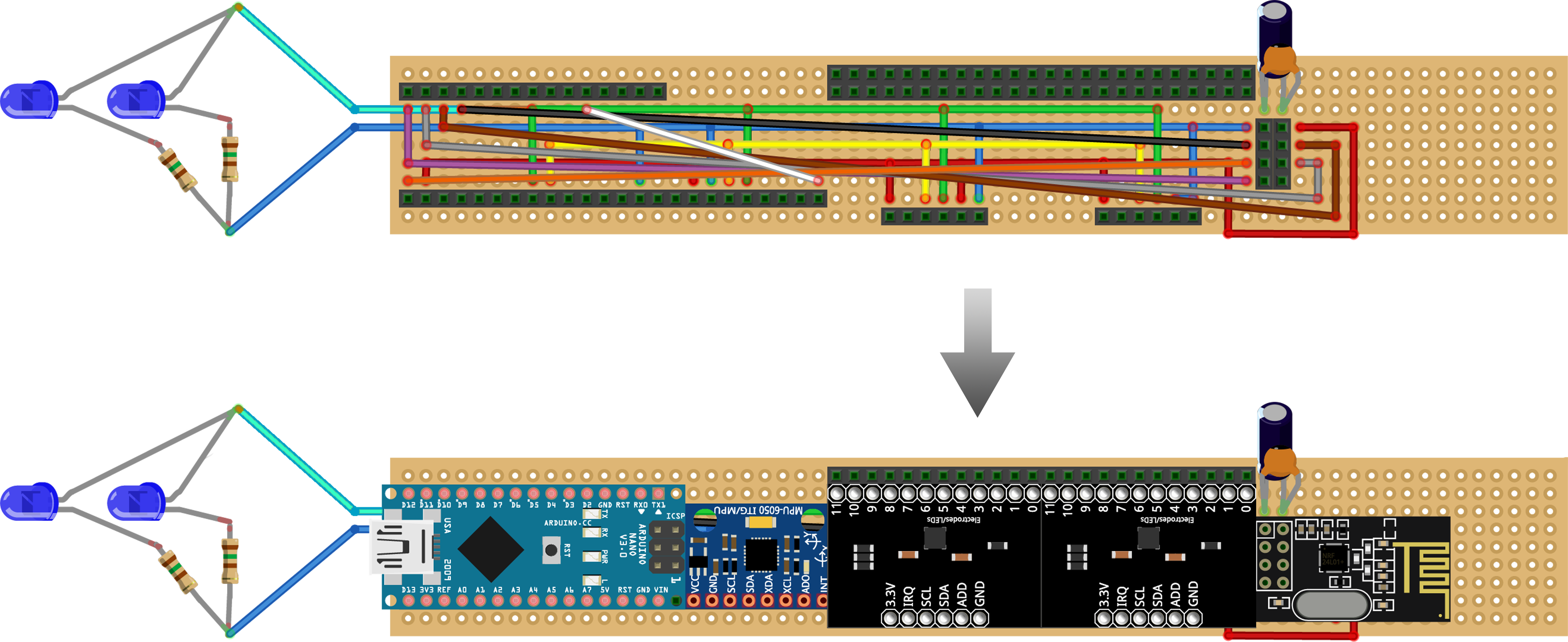
La placa controladora (tal vez) terminada:

2.7
Después de verificar dos veces, si todo está cableado correctamente, el siguiente paso es cargar el código del controlador Kravox provisto (ver archivos adjuntos) al Arduino nano, pero antes de poder hacerlo, deberá instalar bibliotecas para el giroscopio, el tarjetas de sensores táctiles y el transceptor de radio. Si es nuevo en las bibliotecas Arduino, descubra cómo instalarlas aquí.
- El giroscopio MPU-6050 requiere las bibliotecas "I2Cdev.h" y "MPU6050_6Axis_MotionApps20.h" de Jeff Rowberg que se pueden descargar aquí.
- Las placas de sensor táctil MPR121 necesitan la biblioteca "MPR121.h" de Bare Conductive que se puede encontrar aquí. Existen al menos dos versiones de la biblioteca. Asegúrese de instalar la versión desarrollada por Bare Conductive y no la desarrollada por Adafruit.
- La placa transceptora de radio NRF24L01 requiere las bibliotecas "nRF24L01.h" y "RF24.h" de TMRh20 que se pueden descargar aquí. Tenga en cuenta:también existen al menos dos versiones de esas bibliotecas con nombres idénticos. Asegúrese de instalar los desarrollados por TMRh20 y no los de maniacbug.
Tan pronto como se instalen las bibliotecas, puede cargar el código del controlador Kravox. Si ya desea verificar, si el controlador está funcionando, puede dejar que emita datos de los sensores táctiles y el giroscopio a través del Monitor serial. Para eso necesitas descomentar la última sección del código del receptor antes de cargar:

eliminando las marcas de comentario al principio (/ *) y al final (* /) para que el código se vea así:
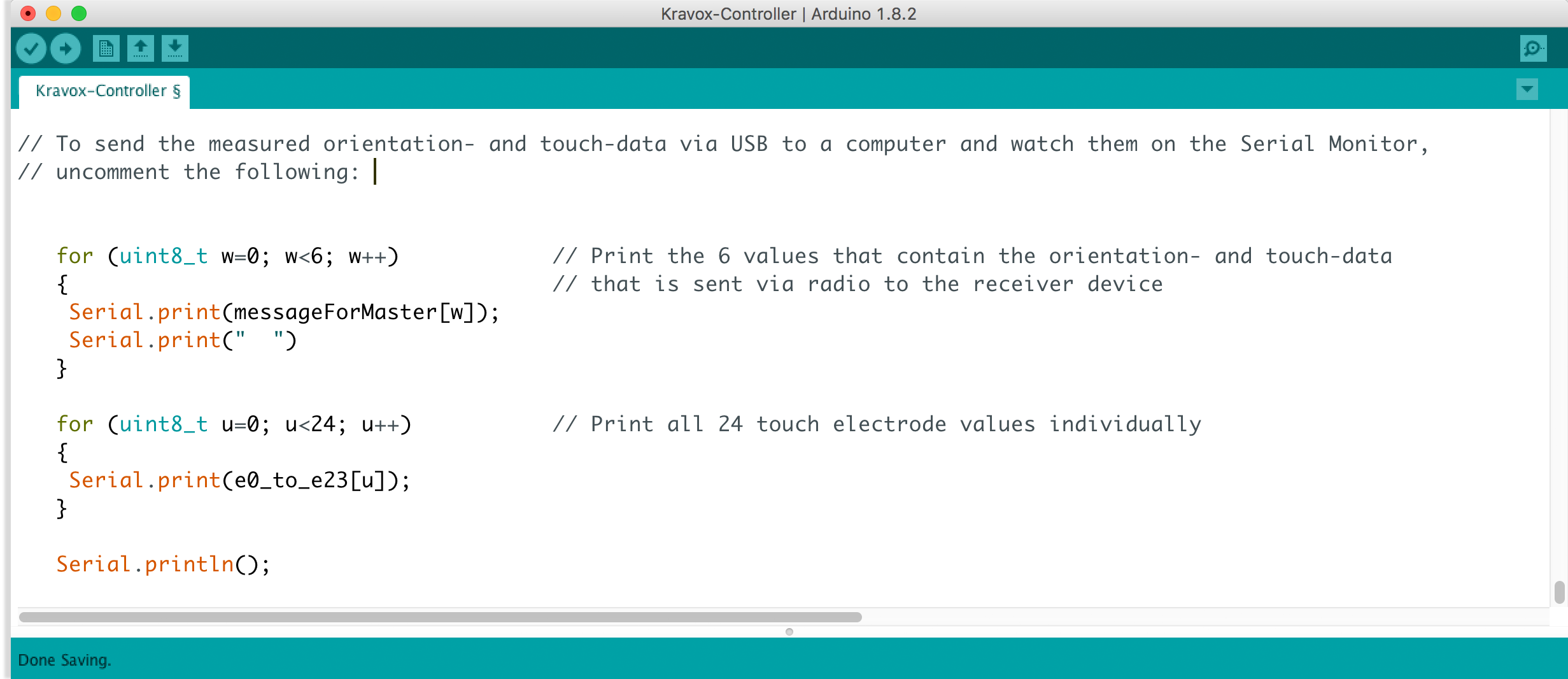
Después de cargar el código con esa variación, abra el Monitor en serie y configúrelo en una velocidad en baudios (velocidad de transferencia de datos) de 115200. Ahora debería poder ver los datos de los sensores que cambian cuando mueve la placa del controlador y toca los pines de las placas MPR121 que están etiquetadas de 0 a 11.
Si nada funciona o solo obtiene ceros, verifique su cableado cuidadosamente y compárelo con el diagrama de circuito anterior. Si obtiene un resultado extraño del Monitor en serie, verifique si lo ha configurado con la velocidad en baudios correcta.
2.8
Conecte su placa controladora al banco de energía que desea usar con ella.
Si la placa (o más precisamente la batería externa) no se apaga automáticamente después de un tiempo, su placa controladora está terminada y puede continuar con la Parte 3. De lo contrario, realice el paso 2.9
2.9
En principio, la placa controladora está lista, pero algunos powerbanks se apagarán automáticamente después de unos segundos cuando se conecten a la placa controladora como está ahora porque consume muy poca energía
Como solución sucia, podemos simplemente agregar tres resistencias de 220 Ohm en paralelo entre los pines 5V y GND del Arduino. Esas resistencias disiparán energía adicional y la transformarán en calor, por lo que el controlador consume lo suficiente para que el banco de energía permanezca encendido. No se preocupe:incluso con un banco de energía pequeño, seguirá funcionando durante días sin parar sin recargar
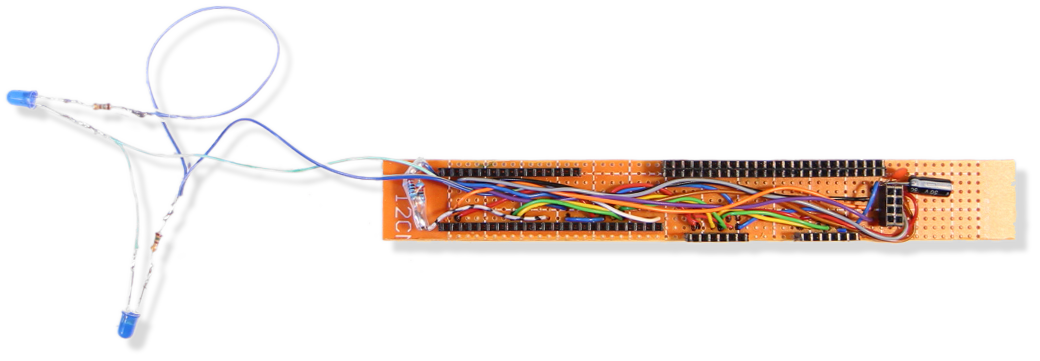
Retire el Arduino Nano y suelde las resistencias de esta manera:

Entonces el tablero se ve así:
y después de volver a conectar los componentes, la placa controladora (definitivamente) terminada se ve así:
Parte 3:Fabricación de la placa receptora
En esta parte del tutorial te mostraré cómo hacer la placa receptora. El proceso es bastante similar a hacer la placa del controlador
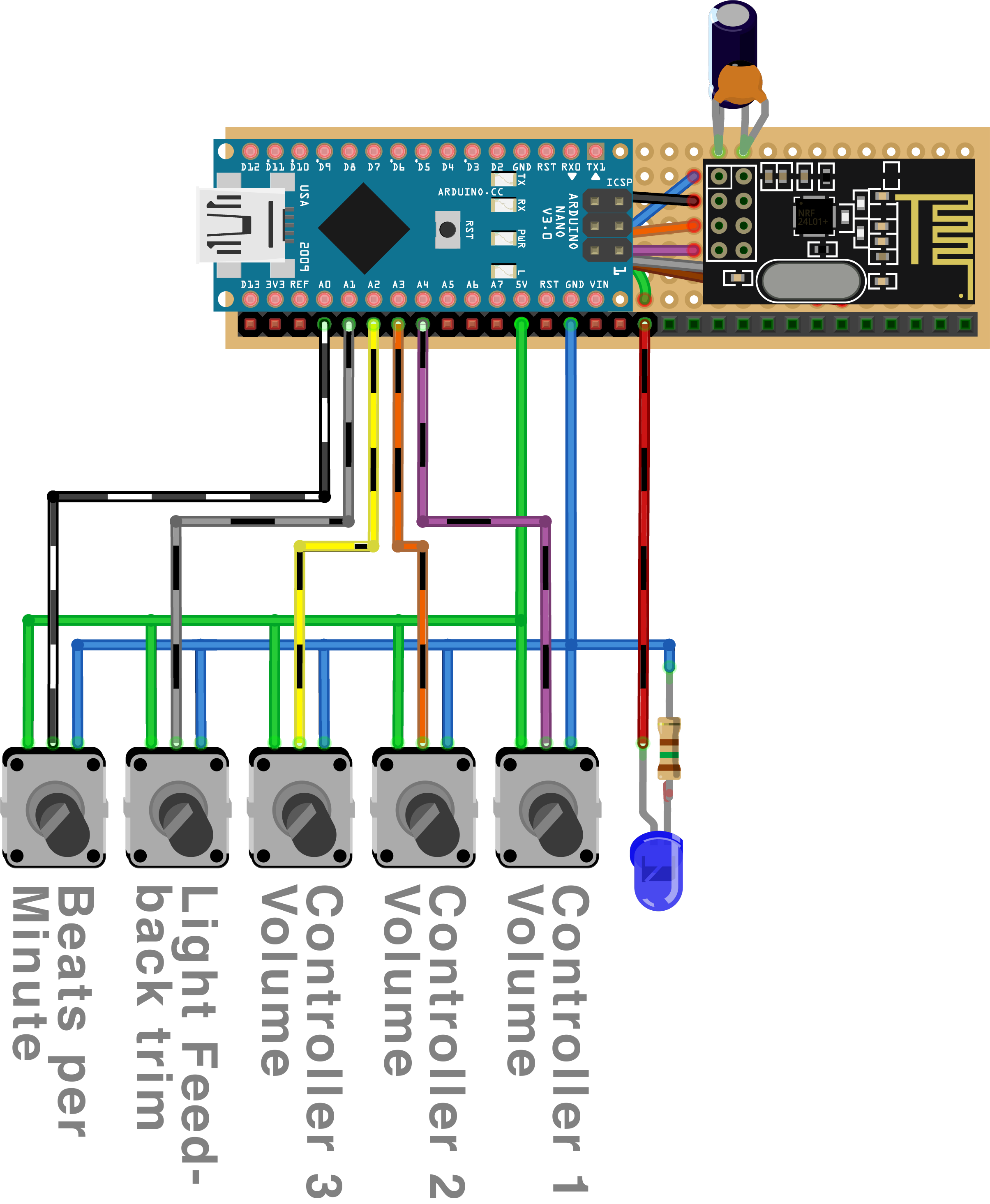
Si desea verificar dónde se debe conectar un determinado cable, puede consultar este diagrama de circuito:
3.1
El primer paso es nuevamente cortar la placa de perforación y los conectores hembra de los pines al tamaño adecuado y ensamblarlos junto con un capacitor pequeño y uno grande que ayuden a aumentar la confiabilidad del transceptor de radio. El encabezado de pin hembra más bajo se deja intencionalmente más tiempo de lo necesario, por lo que potencialmente puede usarlo para otros proyectos como un sintetizador granular Arduino más adelante. Puede comparar este paso con el paso 2.1 para obtener más información
Una foto del tablero al final del paso 3.1:
3.2
A continuación, agregamos todos los cables de alimentación rojo y azul. El rojo es para 3.3 voltios y el azul para tierra (GND)
Así es como debería verse:
3.3
Soldadura en los cables para comunicación SPI:
3.4
Adjuntar los componentes:

La placa del receptor está terminada ahora, pero antes de que podamos cargar el código del receptor Kravox de los archivos adjuntos al Arduino Nano, primero necesitamos crear una interfaz para el receptor
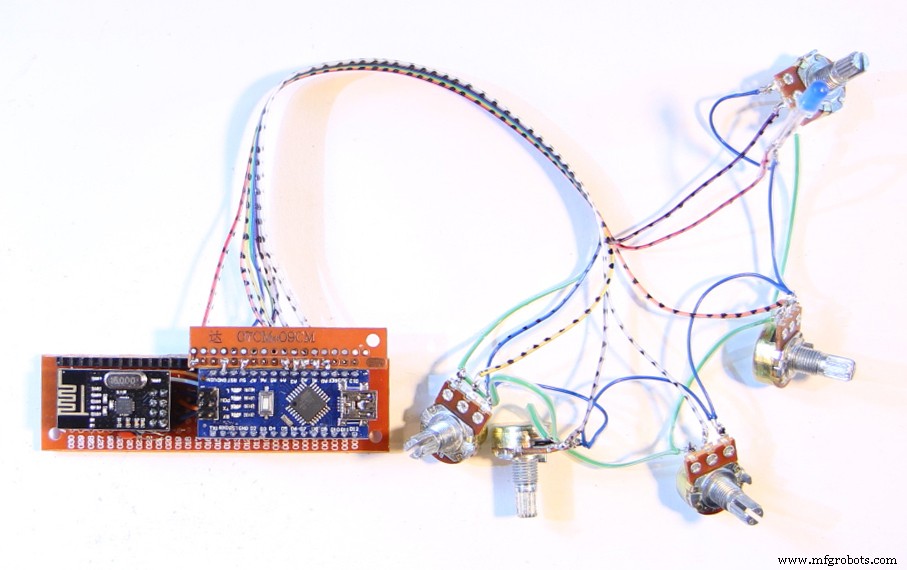
Parte 4:Creación de la interfaz del receptor
En esta parte del tutorial te muestro cómo hacer una interfaz con 4 potenciómetros y un LED para el receptor. La interfaz está cableada así:
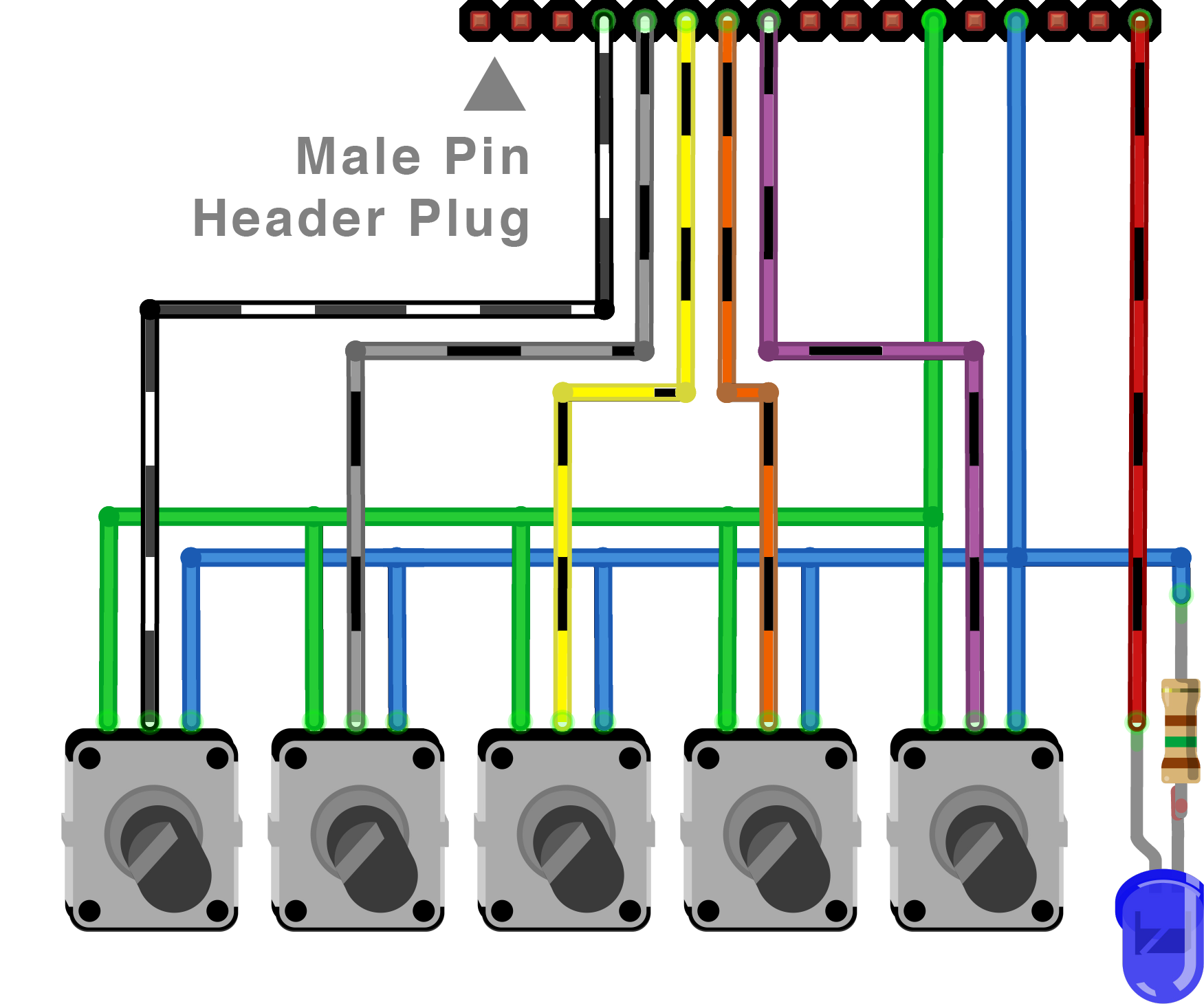
Y se conectará a la placa del receptor de esa manera:
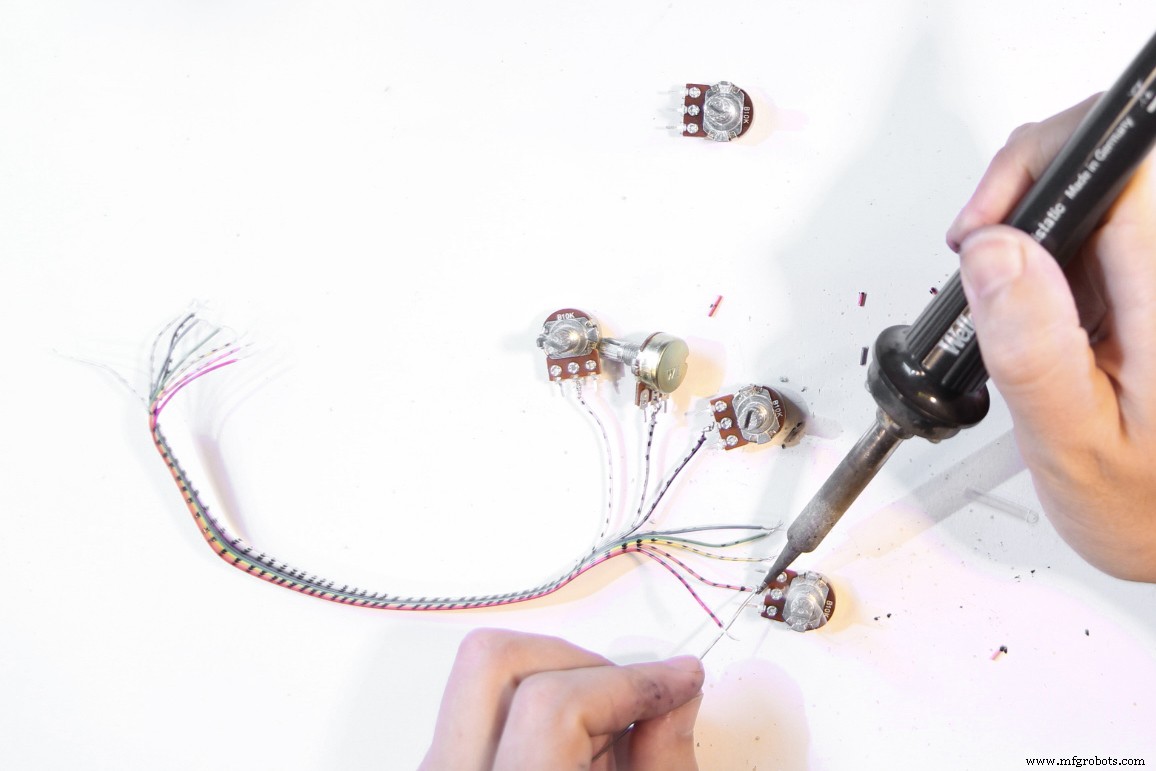
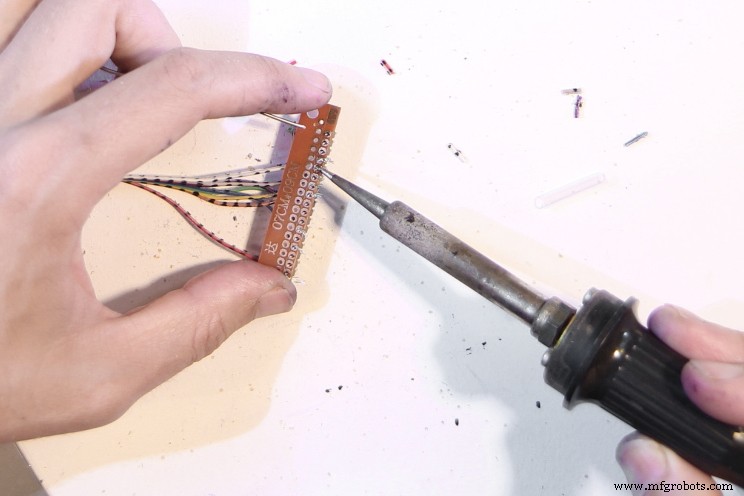
Proceda así:Primero tome una hebra de cable de 8 cables y suelde 5 de ellos a las clavijas del medio de los potenciómetros. Preferiblemente use los mismos colores para no confundirse:
A continuación, corte una placa perforada de 2 * 17 orificios de ancho y un cabezal de clavija macho de 17 pines al tamaño

Conecte los cables y el encabezado de pines a la placa. Preste atención al diagrama de circuito anterior para asegurarse de conectar los cables en los lugares correctos
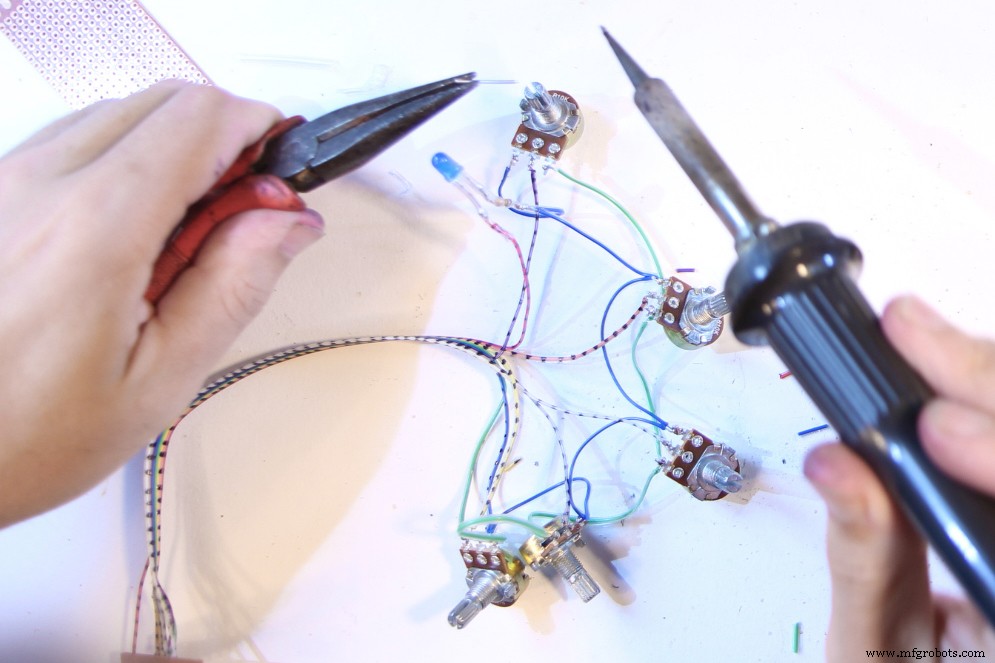
Ahora conecte un lado de todos los potenciómetros con cables azules de conexión a tierra (y tal vez use cables un poco más largos que yo). También agregue el LED azul con su resistencia de limitación de corriente de 150 ohmios. Nuevamente, preste atención a la polaridad del LED (compare con el paso 2.2)
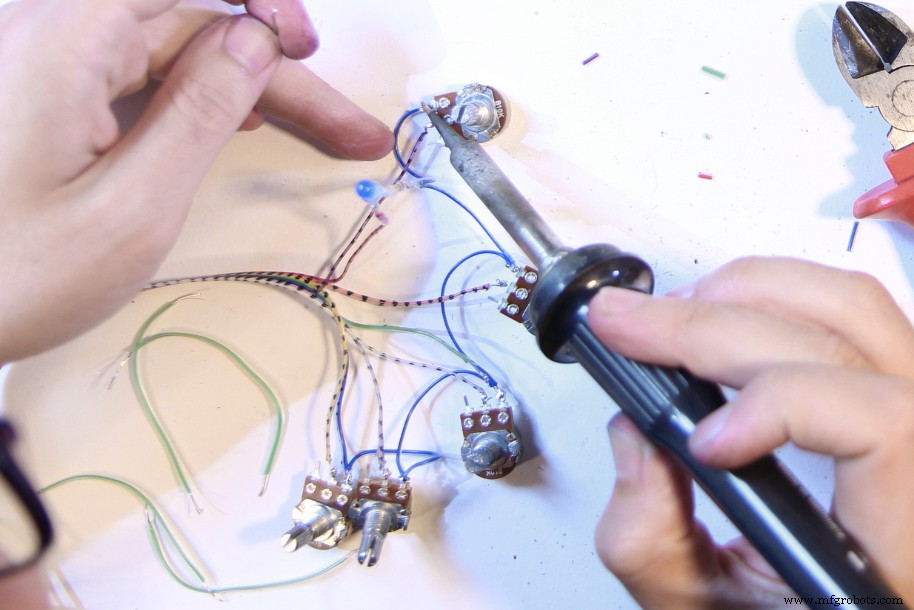
A continuación, conecte el otro lado de todos los potenciómetros con cables de conexión verdes de 5V (y tal vez use cables un poco más largos que yo).
The finished interface should look similar to this...
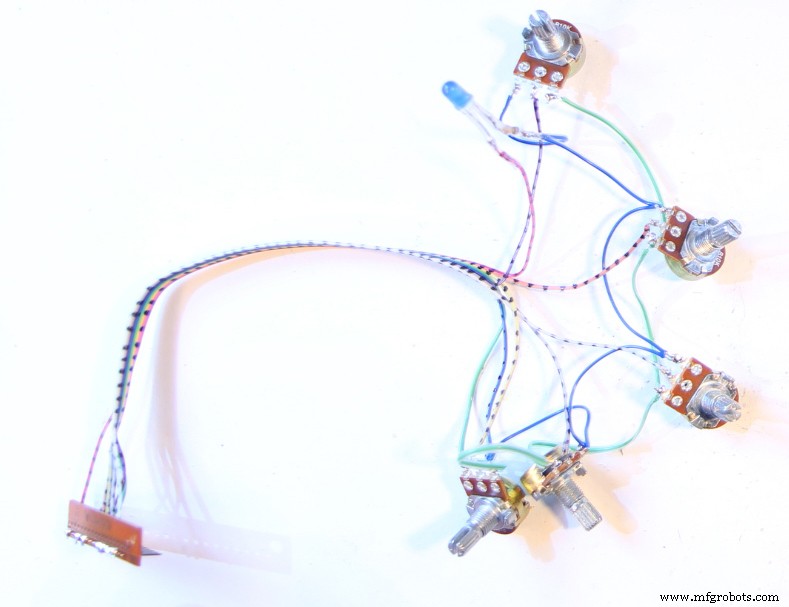
...and can be plugged into the receiver board like that:
Now you can also upload the Kravox Receiver code to the receiver's Arduino Nano.
If you want to see if it is working and receiving data from the controller, you again need to make a slight adjustment to the code before uploading. By default the Receiver will output it's data in a format that can be interpreted by pure data, but will not show useful information on the Serial Monitor. However you can change this behaviour in the code by commenting (adding // in front of) the line that says:
#define WRITE_AS_BYTES
and uncommenting (removing // in front of) the line that says:
// #define PRINT_VIA_SERIAL_MONITOR
So you turn this:
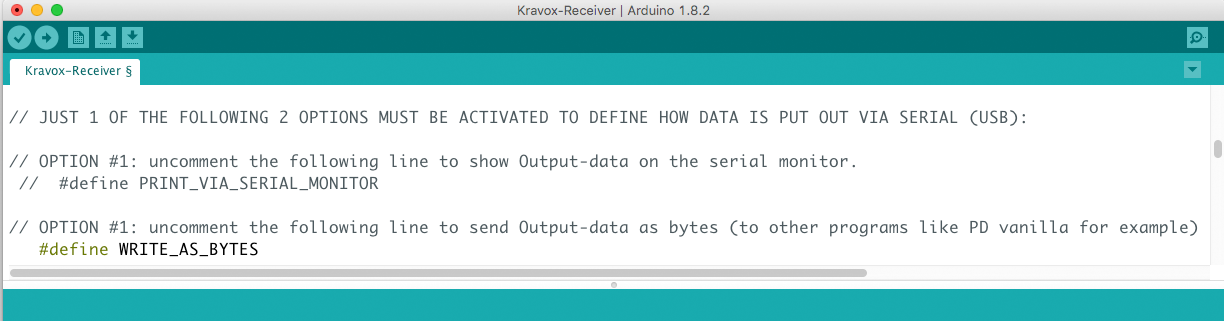
into that:
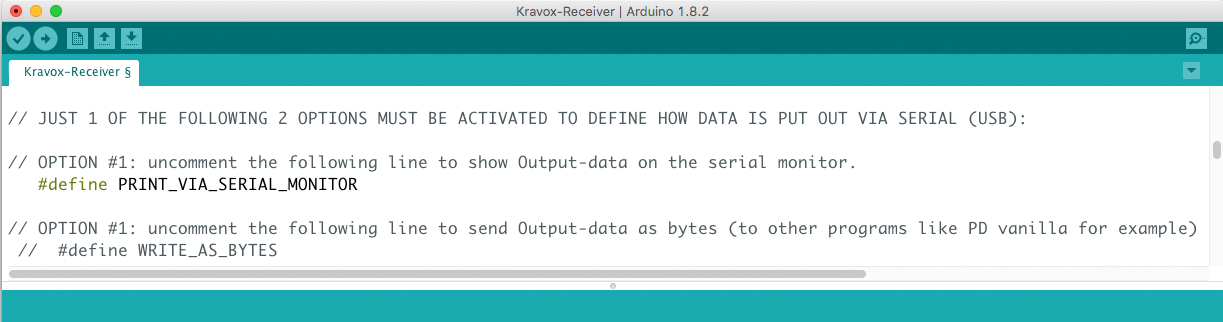
After uploading the altered code you will be able to see data from the controller and 4 of the potentiometers on the Serial Monitor as I demonstrate in this video:
Part 5 – Making the Controller Interface + Enclosure
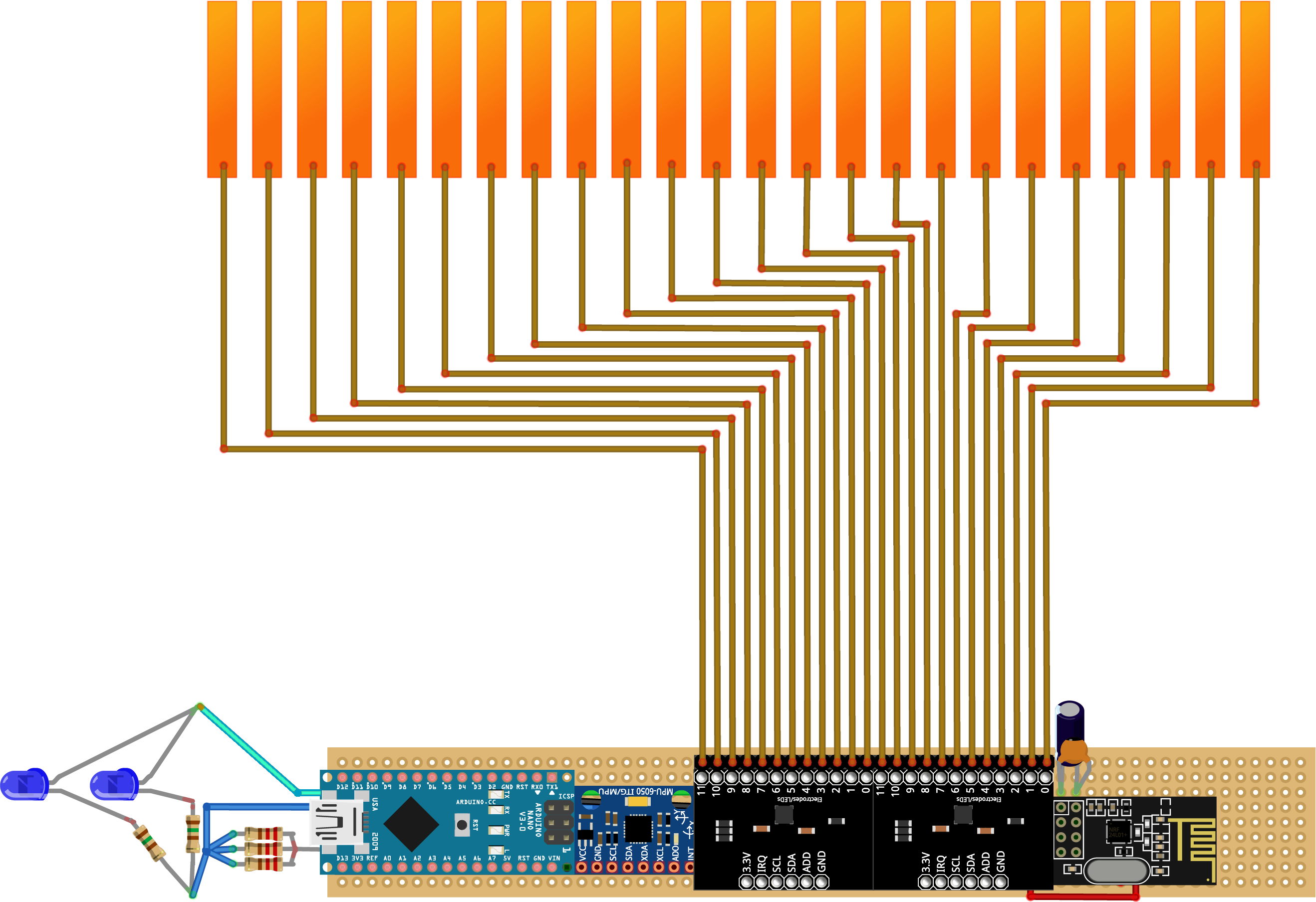
Like the receiver the controller also gets an interface – a touch interface that we will make from copper tape:
It will be connected to the controller board like this:
As we directly want to attach the touch interface to the controller's enclosure, you should already have the (non-conductive) material at hand that you want to make the enclosure from. I used empty boxes that cling film and plastic bags came in:

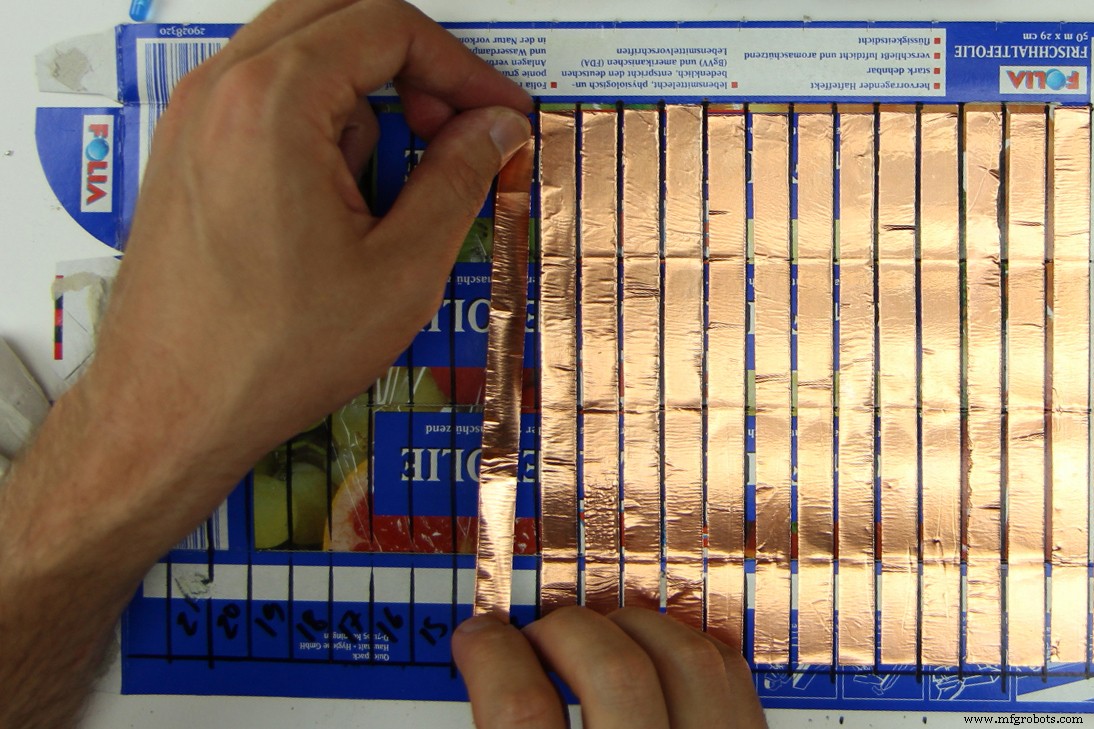
Start making the controller interface by marking where you want to attach the touch electrodes. Please note that they must not touch or overlap each other:

Next, cut the 24 copper electrodes to size...

...and attach them to the enclosure:
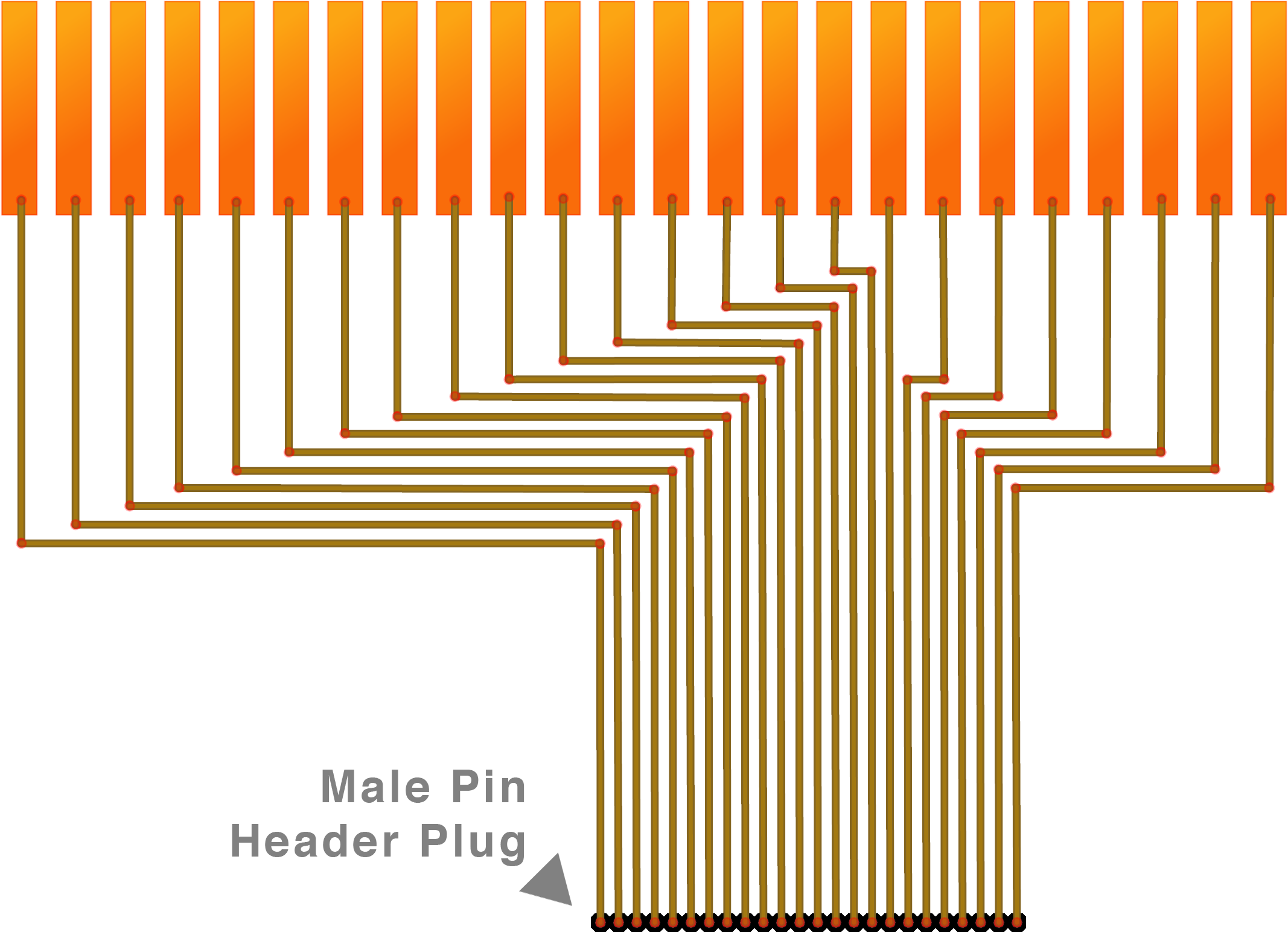
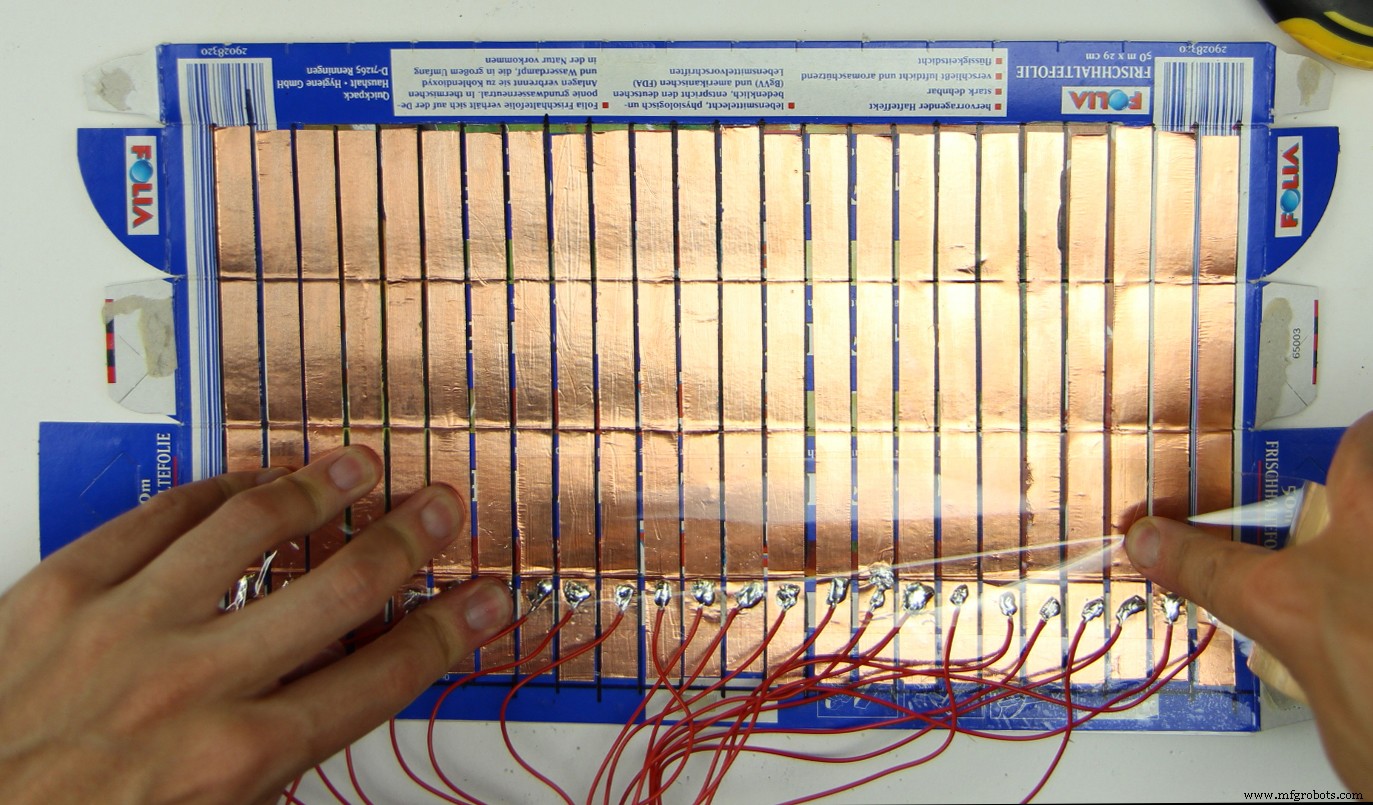
Now we can make the plug. For that cut a 2 * 24 hole wide perfboard and a 24 pin male header to size and solder 24 cables to it. The cables in the middle should be at least 10 cm long. To the outside add the width of your electrodes plus the spacing in between for each cable. If for example you use 1 cm wide copper tape and leave 3 mm between the electrodes, your cable length should increase by 1.3 cm like this 10 / 11.3 / 12.6 / 13.9 / 15.2...
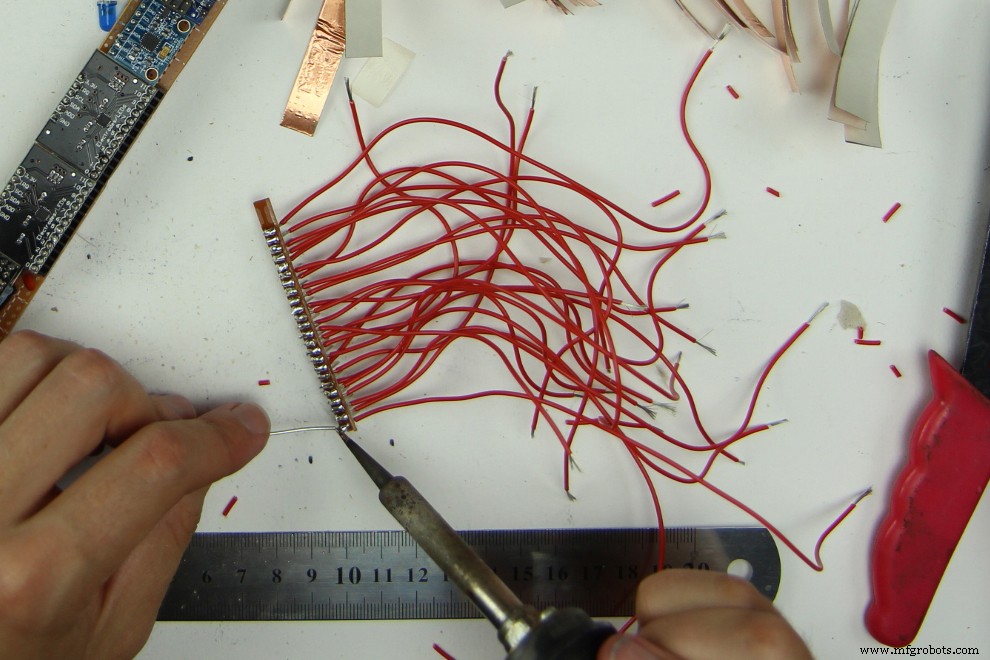
and solder the other ends of the cables to the electrodes like this:
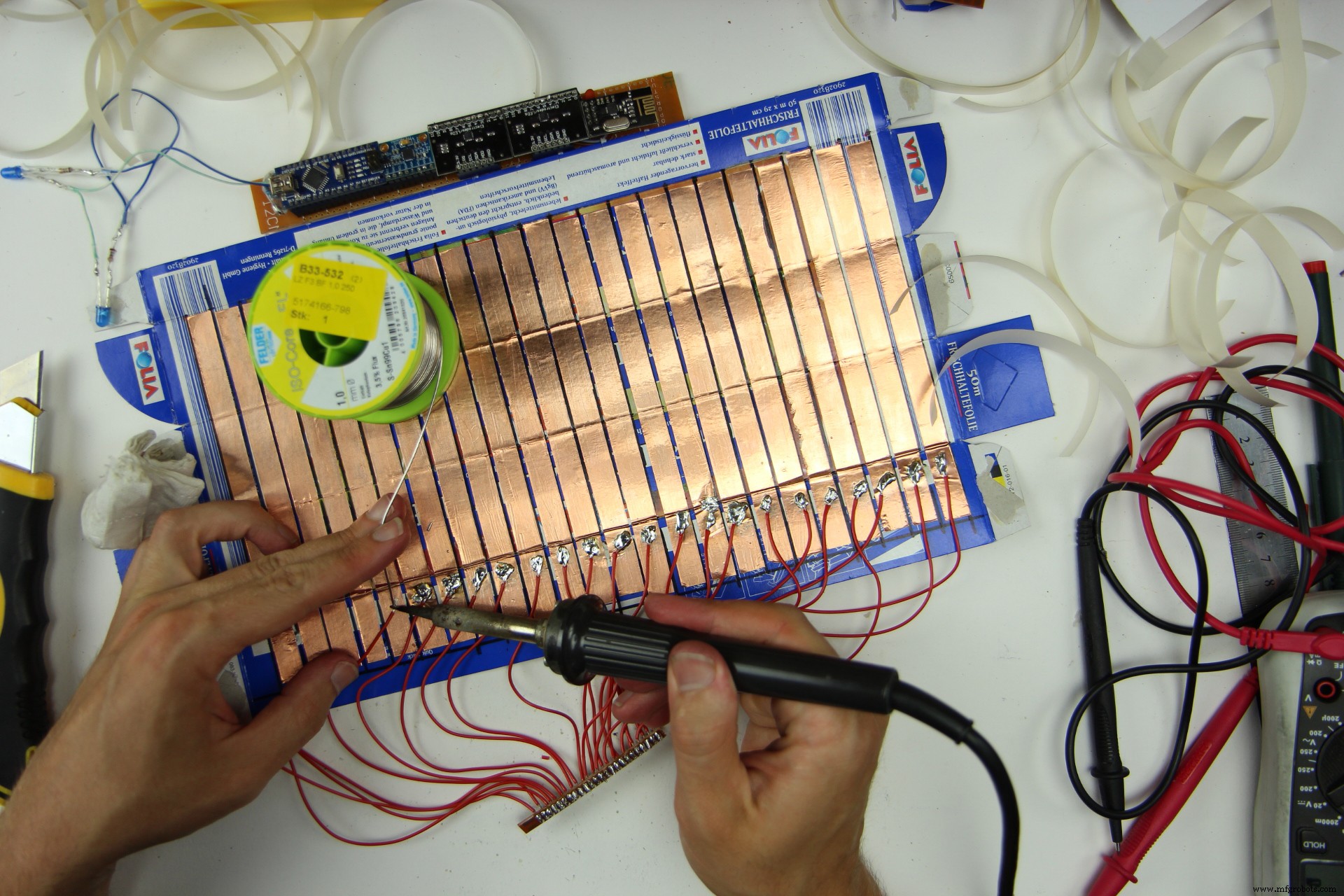
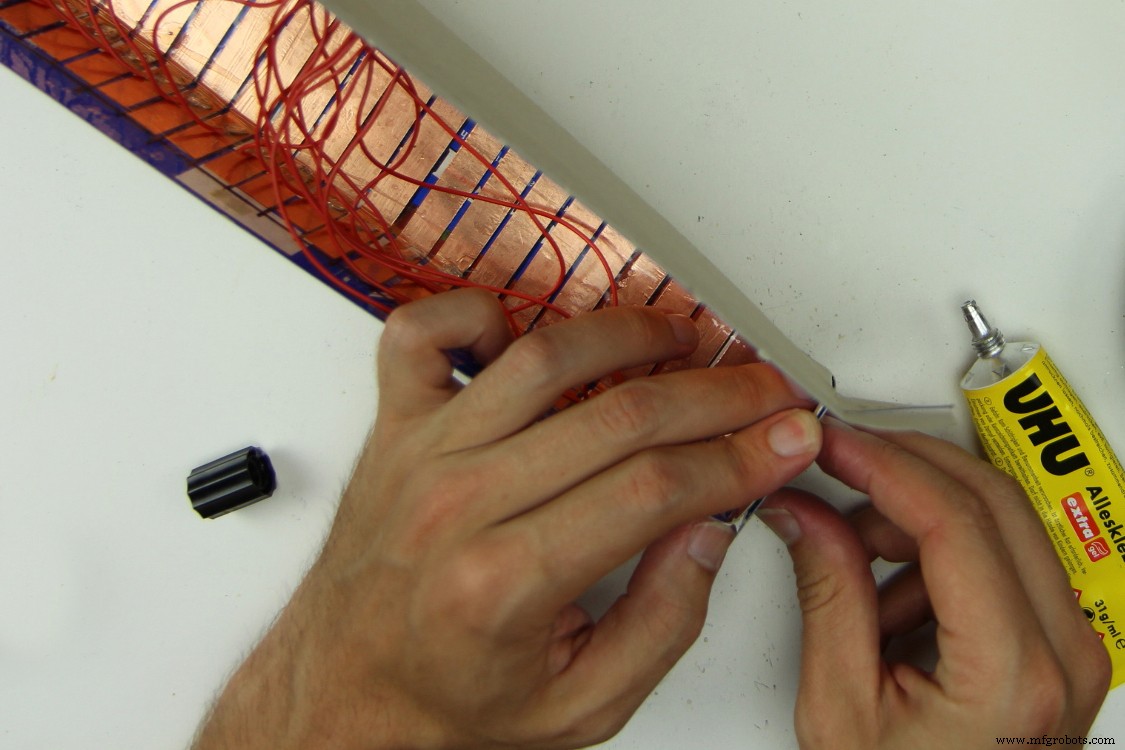
Finish the interface by covering the copper surface with non-conductive adhesive tape:
Next fold the interface into a box and glue it:
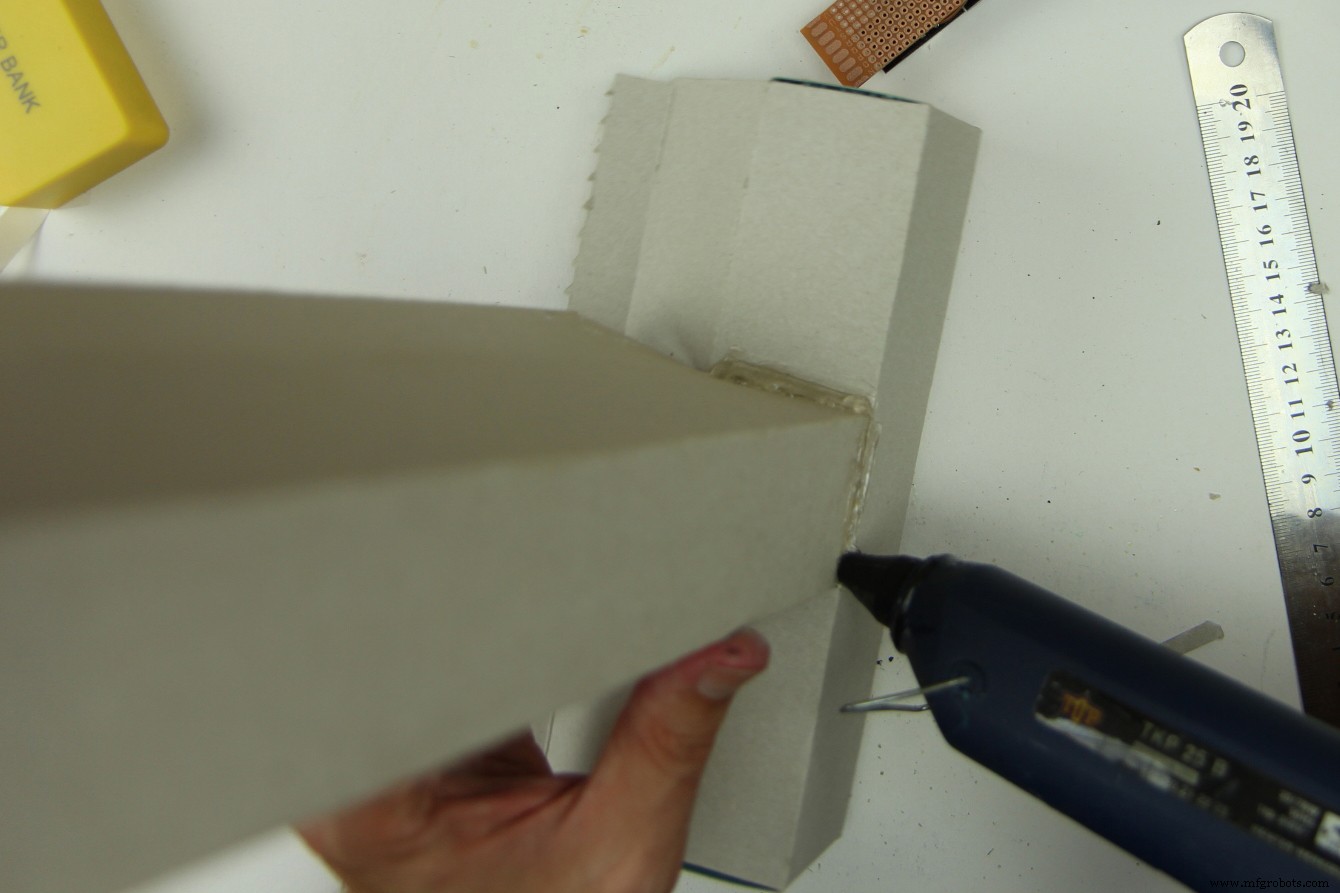
Glue a smaller box to the box we made in the previous step. It later will contain the powerbank:
Cover the back of the controller board with some leftover cardboard orother slightly thicker non-conductive material:
Cut out holes for the LEDs and glue them and the powerbank (yellow object in the picture) in place. Make sure to place the powerbank in a way that you can still plug in and remove the USB-cable because that is how you turn your controller on and off. Also connect the touch-interface to the controller board and put it in the box. Most likely it will not move much, so you do not need to glue it in.
Make a cut out for the USB-A to USB-C cable at the junction of the two boxes, pull it through and connect it to the Arduino Nano:
Now the Controller is done!
You can close it with some rubber bands. If you later have problems with the sensors recognizing touch when there is none, try to put some non-conductive material like clingfilm or the like between the touch sensitive enclosure and the board and meandering cables. Also make sure to connect the powerbank when the touch sensitive part of the enclosure does not touch your hands or anything else. See Part 7 for more info.
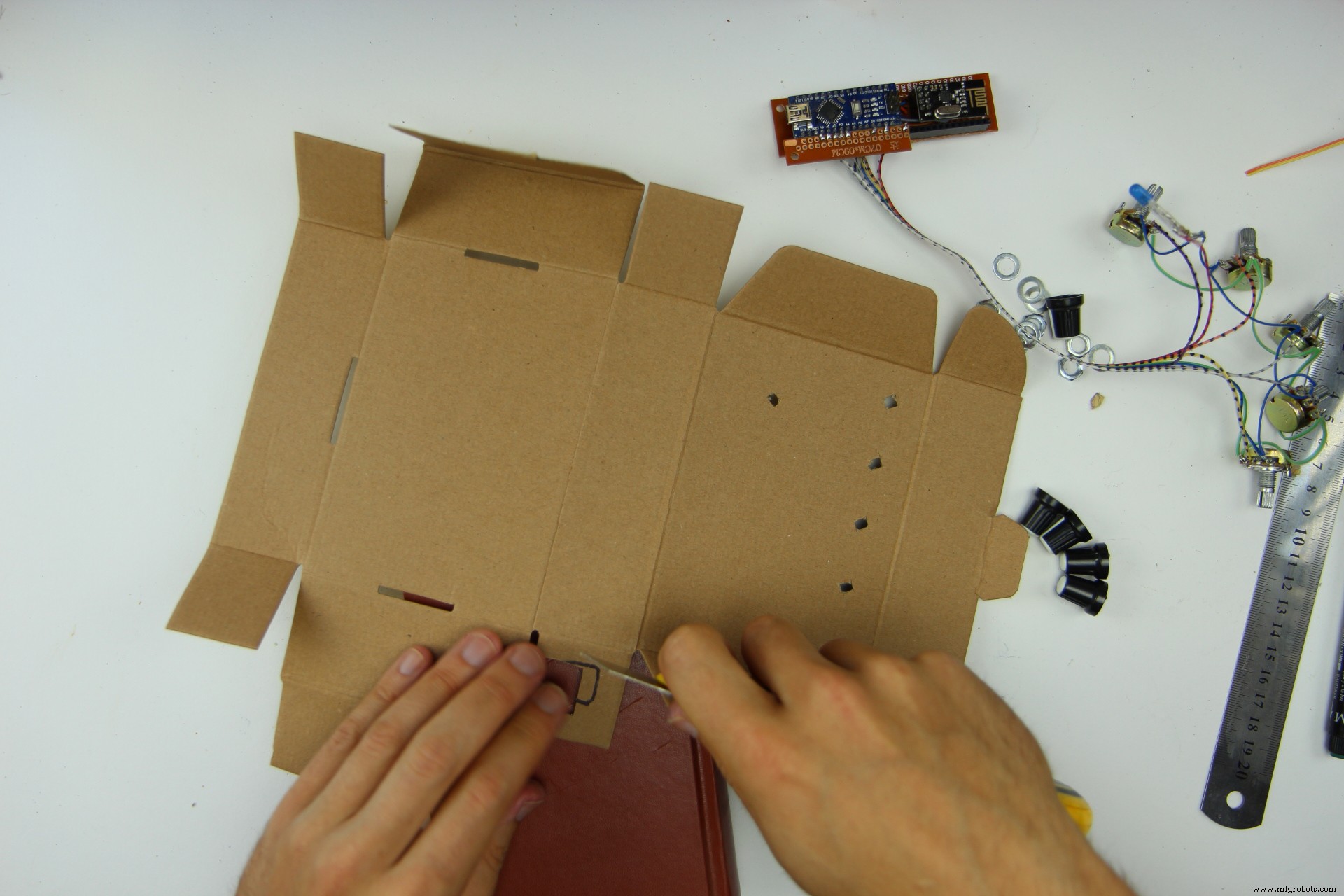
Part 6 – Making the Receiver Enclosure
In part six we will make an enclosure for the receiver as well. You will need another cardboard box (I chose one that contained a bluetooth transceiver before – fitting huh?) and some knobs for the potentiometers
First cut out some circular holes for the potentiometers the LED. Also mak a cut out where you want to connect the USB-Cable to the Arduino Nano
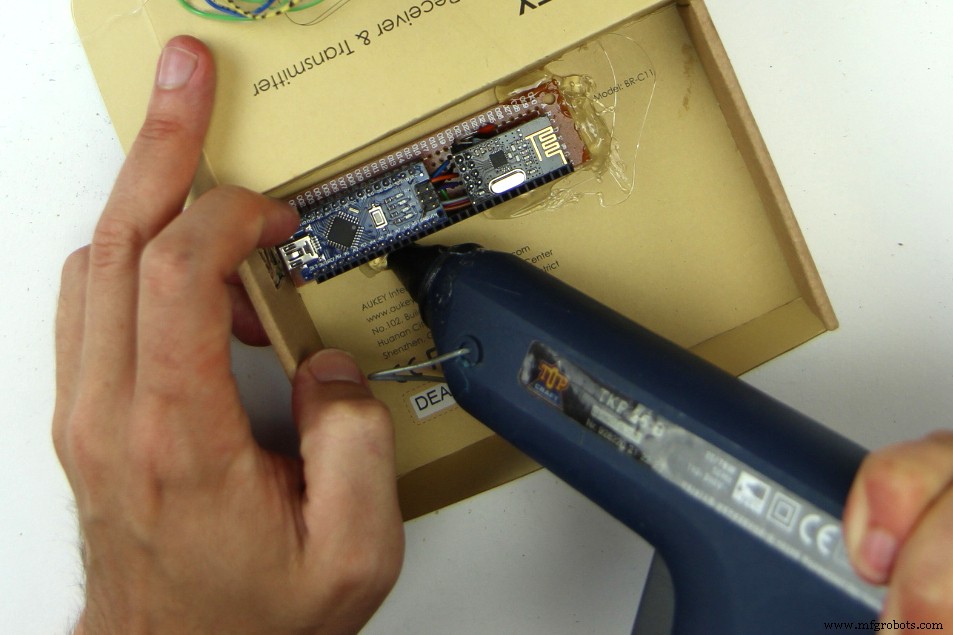
Glue the Receiver board in. Make shure that the USB-C Jack of the Arduino Nano is aligned with the hole that you cut out for the cable connection in the step before.
Next glue in the LED and screw in all the potentiometers. The order how to put them in is the same as in the circuit diagram above:
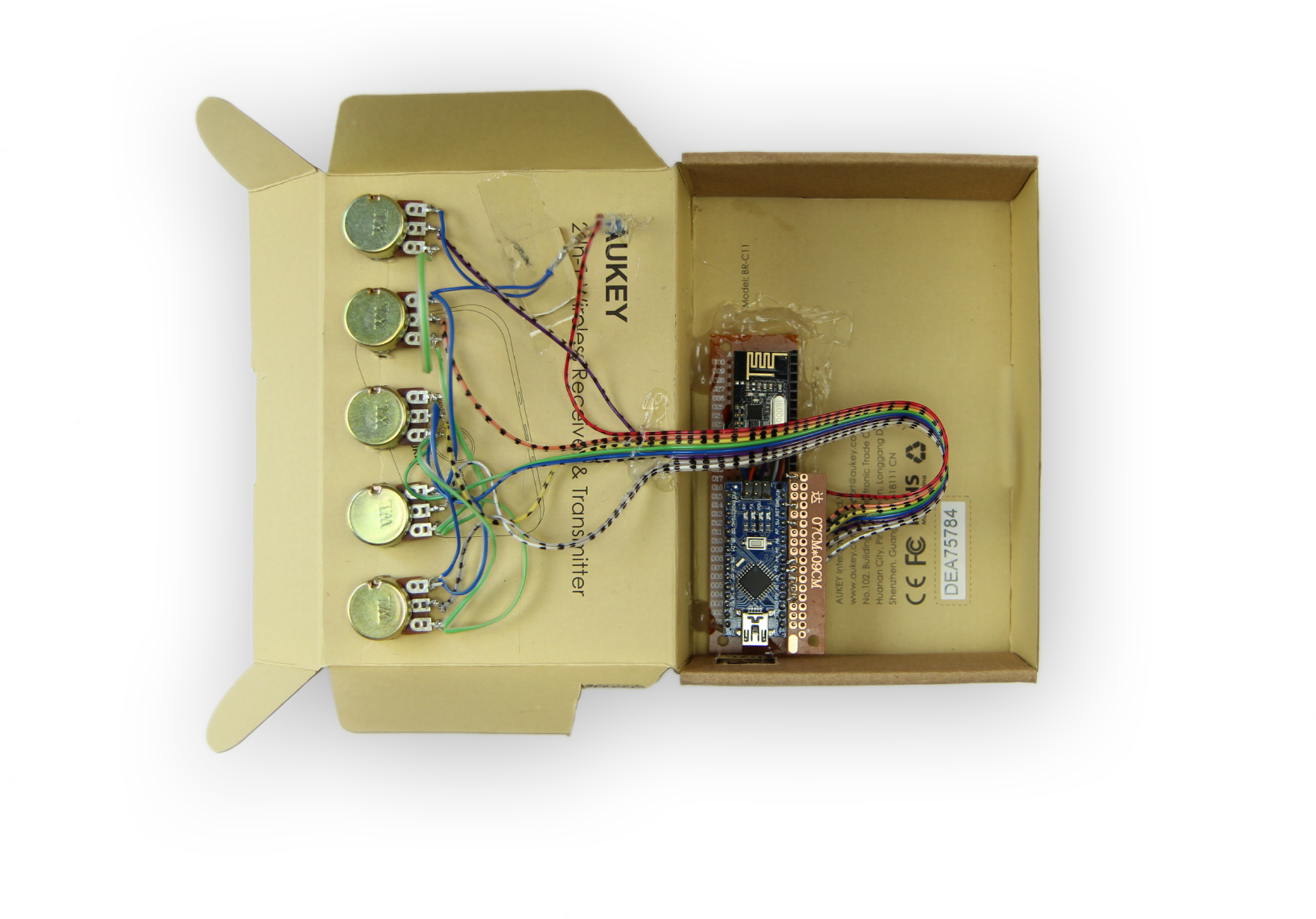
Now you only need to attach the knobs....
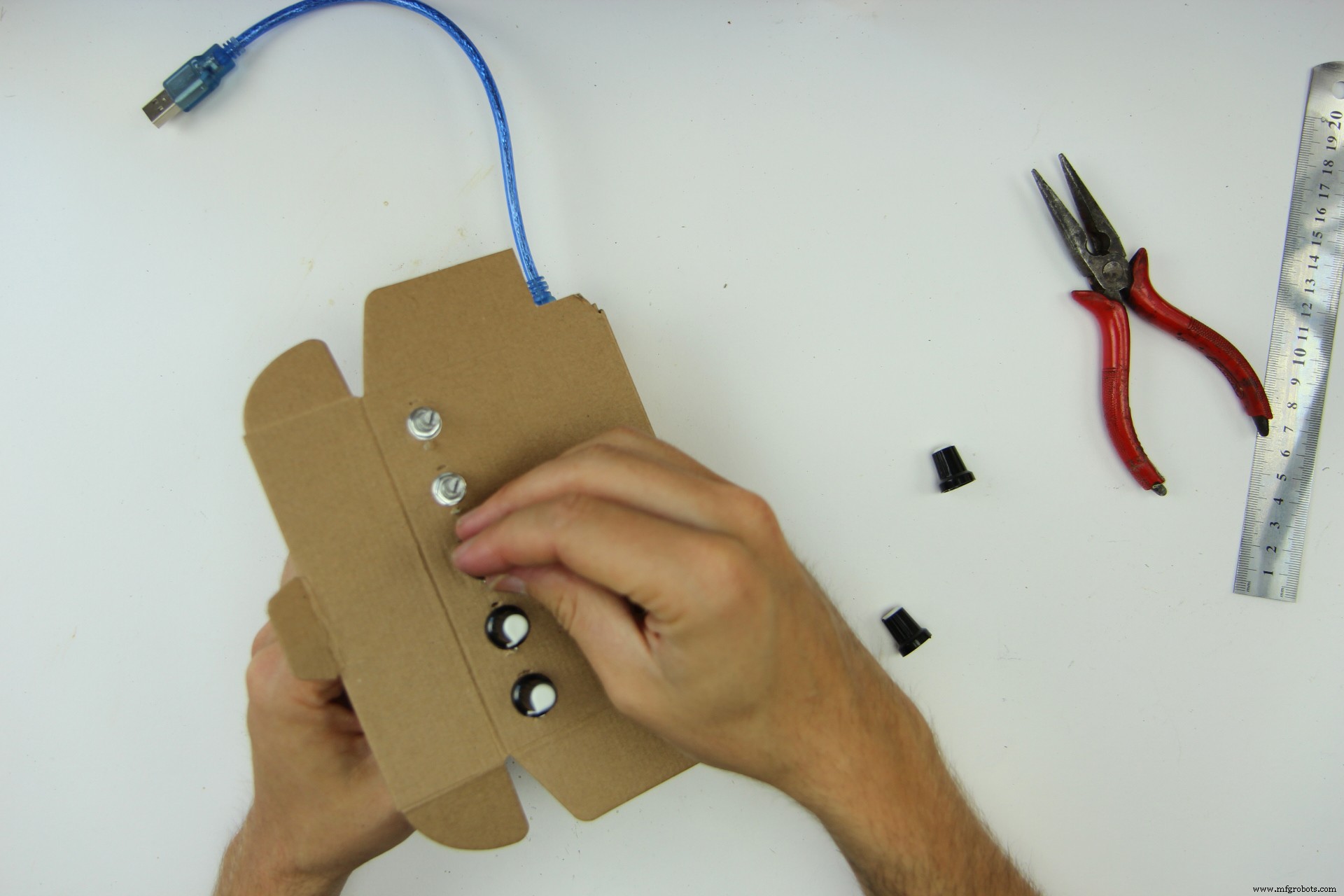
...and the receiver is finished!

Part 7 – Connecting the Receiver to Pure Data
Now that all the hardware is finished, it's time to play some music with it! For that you need software that you can connect the hardware to. For Kravox that software is Pure Data Vanilla that you can download here for free
After installing Pure Data to your computer, start it and open the Kravox.pd file from the attachments. Please note that it needs to be saved on your computer in the same place as the drumsamples folder it comes with - otherwise Pure Data cannot find the samples
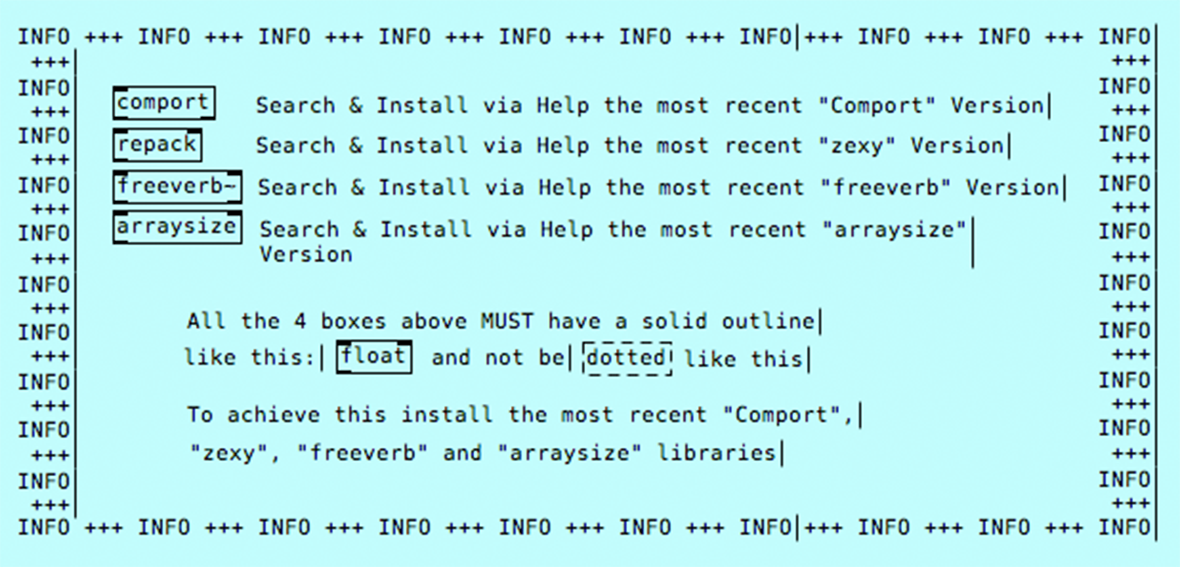
As soon as the Kravox.pd software interface has opened, look for a blue-info box and install the four so-called externals that are listed in the box. Installing them is straightforward:Just click on "help" in the Pure Data Menu, choose "Find additional objects on the internet" (might be phrased slightly different), search for "comport", "zexy", "freeverb" and "arraysize" one by one and install the most recent version. Now the four objects labeled, comport, repack, freeverb and arraysize should have a solid outline like in the picture below. You might need to restart Pure Data for that though
After installing the necessary externals you can connect the Receiver Box via USB. If you altered the code in Part 4 to use the Receiver with the Arduino Serial Monitor you need to undo this change first and upload the original code to the receiver's Arduino Nano before connecting and close the Arduino Serial Monitor, so the receiver is not busy trying to talk to it.
Now have a look at Pure Data's log / info window. If you see a rapidly updating data stream that's great because it means that pure data has already found the receiver, but most likely it will instead show you a red message like the one below that refreshes every other moment:
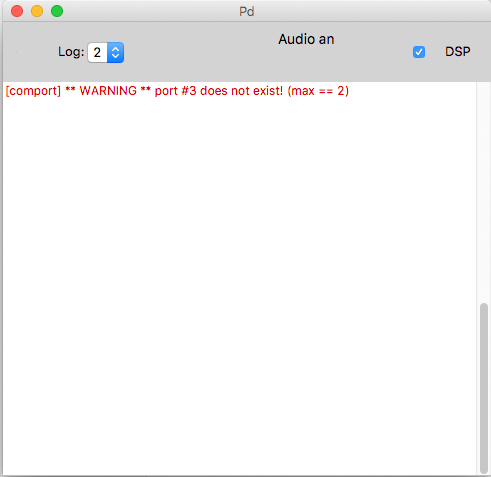
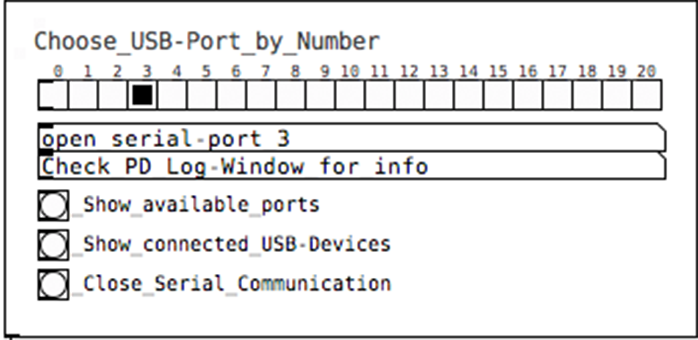
The red message might be a little different, but the result is the same:Pure Data did not yet succeed to connect to your receiver. That is because the program needs to be told, which USB port to listen to. USB-ports are sometimes a bit of a funny thing though:On a 2014 macbook Pro, Pure Data recognizes both USB ports as Serial Port 3, no matter to which you connect the receiver. In Milan I used Kravox with a Lenovo Yoga Pad with only one working USB-Port, that needed to be contacted as Serial Port 6, and recently installed it to another Windows Notebook with two USB-Ports, that wished to be addressed as Serial Ports 8 and 9... So my advice is just to try which number works with your USB-Port. For that I created a simple dialog as part of the Kravox.pd interface, where you can just click through the numbers until one works. You can also try the "Show available ports" and "Show connected USB-devices" buttons – Sometimes, but not very often that also provides useful information. However it takes a while until you get a response in the info window.
You will notice that you have found the right port number and that a connection has been established when the info window shows a data stream like this that updates rapidly:
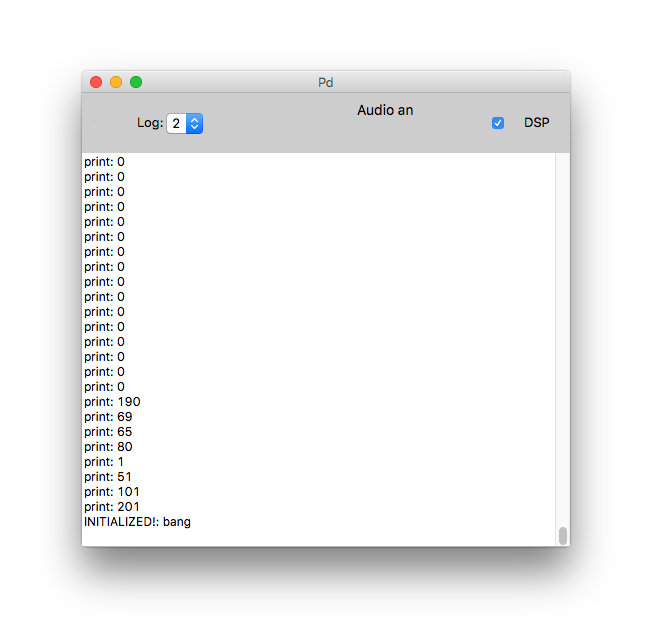
¡Muy bien hasta ahora! Click save, so Pure Data will attempt to connect to this port the next time it opens automatically.
However we still need to turn the controller on. If you uncommented the last section of the Kravox Controller code in step 2.7 to connect the controller to the Serial Monitor you should upload the original Version again now.
Connect the controller board to the powerbank. When you do this, the touch-interface-enclosure around the the board should be closed and the touch sensitive part of the enclosure should not touch your hands or anything else, as the touch sensors sense their environment when powered up and assume it to be the untouched state
Congratulations – You are done!
Have much fun playing Kravox!
Código
Kravox Code for Arduino and Pure Data
Under this link you can download a Zip-File that contains the Arduino Code for the Kravox controller and the Kravox receiver, the Kravox.pd-file for Pure Data and the necessary drumsamples for the instrument. Please refer to the tutorial for instructions how to use the files.https://github.com/timkrahmer/KravoxEsquemas
Proceso de manufactura
- Canal y esclusa
- Saxofón
- Arco y flecha
- Tuba
- Dulcimer
- Rutronik:módulos y SoC inalámbricos multiprotocolo de Redpine Signals
- Sensor de movimiento con Raspberry Pi
- Las redes inalámbricas 5G podrían transformar la IoT y los impuestos
- El control de movimiento con seguridad integrada permite que la seguridad y la productividad coexistan
- Conexiones para Control:Interfaces de Comunicaciones para Sensores de Posición y Movimiento
- ¿Cómo elegir entre sierra de cinta y sierra circular en función de mi pieza de trabajo?