


Sensor de deformación ultrasensible basado en una película piezoeléctrica de poli (fluoruro de vinilideno) flexible
Resumen
Se ha demostrado una matriz de sensores 4 × 4 flexible con 16 unidades capacitivas de microescala basada en una película de poli (fluoruro de vinilideno) (PVDF) piezoeléctrico flexible. La piezoelectricidad y la morfología de la superficie del PVDF se examinaron mediante formación de imágenes ópticas y microscopía de fuerza de respuesta piezoeléctrica (PFM). El PFM muestra un contraste de fase, lo que indica una interfaz clara entre el PVDF y el electrodo. Las propiedades electromecánicas muestran que el sensor exhibe una excelente respuesta de salida y una relación señal / ruido ultra alta. El voltaje de salida y la presión aplicada poseen una relación lineal con una pendiente de 12 mV / kPa. Las características de salida de retención y liberación se recuperan en menos de 2,5 μs, lo que demuestra una excelente respuesta electromecánica. Además, la interferencia de señal entre las matrices adyacentes se ha investigado mediante simulación teórica. Los resultados muestran que la interferencia se reduce al disminuir la presión a una tasa de 0.028 mV / kPa, altamente escalable con el tamaño del electrodo y volviéndose insignificante para un nivel de presión por debajo de 178 kPa.
Antecedentes
El poli (fluoruro de vinilideno) (PVDF) es un material polimérico piezoeléctrico químicamente estable que tiene muchas aplicaciones en diferentes campos por sus propiedades piroeléctricas, piezoeléctricas y ferroeléctricas [1, 2]. Especialmente, debido a las excelentes propiedades mecánicas (módulo de Young 2500 MPa y resistencia en el punto de ruptura ~ 50 MPa), el sensor de presión basado en PVDF muestra una buena propiedad mecánica, como flexibilidad y antifatiga [3, 4]. En comparación con los sensores de presión de uso común basados en materiales ferroeléctricos de la familia PZT, el sensor de presión basado en PVDF no es tóxico y es biocompatible [5, 6]. Lo más importante es que el sensor basado en PVDF era más suave y resistente que el sensor basado en PZT debido al alto coeficiente de flexibilidad de la película de PVDF, que podía tener las formas requeridas para la detección de deformaciones complejas [7, 8]. En consecuencia, se cree que el sensor de presión basado en PVDF es uno de los posibles bio-sensores flexibles para la caracterización de la presión en el rápido desarrollo del campo biomédico [9, 10]. Sharma y col. diseñó un sensor de presión para catéter inteligente con película de PVDF; podría integrarse en un catéter para medir la presión en tiempo real [11]. Bark y col. desarrolló un sistema de sensor de ondas de pulso para medir de manera no intrusiva las señales de ondas de pulso del corazón de las palmas de los conductores basado en PVDF; Los resultados muestran que el sistema de sensores puede proporcionar señales claras de ondas de pulso para el análisis de la variabilidad de la frecuencia cardíaca, que se puede utilizar para detectar el estado de alerta del conductor para evitar accidentes de tráfico [12]. Lee y col. fabricó un sensor con nanoestructuras de PVDF y ZnO y pudo detectar los cambios de presión y temperatura en la piel artificial [13]. Sin embargo, el sensor solo detecta la presión en un único punto de gran dimensión.
Las aplicaciones del mundo real, como el biosensor parcheado para detectar la presión del cuerpo humano, exigen detección multipunto, flexibilidad estructural y sensibilidad ultra alta [14, 15, 16]. En este trabajo informado, se demuestra una matriz de sensores flexibles 4 × 4 basada en una película de PVDF piezoeléctrica, que muestra una sensibilidad ultra alta de 12 mV / kPa y una respuesta de salida rápida de 2,5 μs. Se caracterizan la magnitud y distribución espacial de la presión aplicada sobre un dedo humano.
Diseño y Experimental
Diseño y fabricación de la matriz de sensores
La matriz de sensores propuesta tiene una estructura tipo sándwich basada en una película delgada de PVDF con un espesor de aproximadamente 50 μm (Jinzhou Kexin Inc., China). Las matrices de electrodos de aluminio con un espesor de 20 µm se cubrieron en ambos lados de la película de PVDF. La figura 1a muestra un diseño esquemático del sensor. El sensor tiene 16 unidades de microcondensadores; cada 4 unidades comparten un cable de conexión para minimizar la cantidad de cables de electrodo.
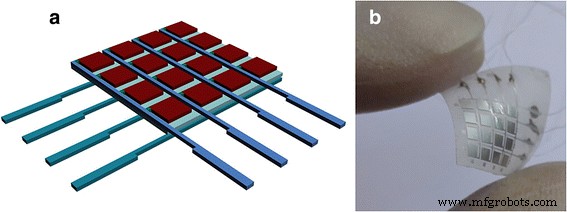
un Diagrama esquemático de la matriz de sensores. b Imagen física del dispositivo definitivo
Para fabricar la matriz de sensores, se preparó un portaobjetos de vidrio cubierto con polidimetilsiloxano (PDMS) como sustrato rígido. La película fina de PVDF cubierta por Al en ambos lados se cargó sobre el sustrato. Luego, el fotorresistente se revistió por rotación sobre la superficie de la película con una velocidad de 3000 rpm durante 40 s. Después de fotolitografía y grabado en húmedo de Al mediante un sistema de alineación de máscara (ABM, Inc., EE. UU.), Se prepararon las 16 unidades de condensadores con estructura cuadrada de 4x4. Después de eso, el sensor flexible en el sustrato de PDMS se tomó del portaobjetos. Los electrodos de cada condensador se conectaron con los cables conductores a través de pegamento plateado. Para obtener una buena biocompatibilidad, el sensor se empaquetó cubriéndolo con PDMS en la parte superior y se calentó durante 12 ha 60 ° C. La Figura 1b muestra una fotografía del sensor de presión doblado, lo que ilumina que el sensor es flexible.
Propiedad piezoeléctrica de la matriz de sensores basada en la película PVDF
Se llevó a cabo un estudio de microscopía de fuerza de respuesta piezoeléctrica (PFM) (Seiko, Inc., Japón) para caracterizar la morfología de la superficie y las propiedades piezoeléctricas de la película de PVDF del sensor propuesto bajo un voltaje de polarización de CA de 2 V con un tamaño de área de exploración de 2 × 2 μm 2 .
Calibración para la matriz de sensores
Para calibrar el sensor, se aplicaron varias presiones sobre el sensor propuesto en una plataforma experimental electromecánica que se conecta a un equipo de adquisición de datos (DAQ-USB6008) de National Instruments. La adquisición de datos con cuatro señales analógicas diferenciales se estableció con modelo diferencial. La señal de voltaje de salida del sensor propuesto se obtuvo cambiando la conexión entre la matriz de sensores y el DAQ.
Resultados y discusión
La figura 2a muestra la morfología de la superficie del sensor después del grabado de Al, comprobada por un microscopio óptico. El contraste bastante brillante y oscuro sugiere una interfaz clara entre PVDF y los electrodos de Al grabados. La Figura 2b, c muestra la morfología de la superficie y la señal de fase de la película de PVDF del sensor de presión. Se indica que la superficie de PVDF es lisa con estructura de tejido. La imagen de fase de la medida de PFM en la Fig. 2c muestra una fuerte respuesta del dominio piezoeléctrico que es consistente con la estructura de la superficie vista en la Fig. 2b. Estos resultados sugieren que el sensor preparado basado en la película de PVDF exhibe una buena piezoelectricidad.
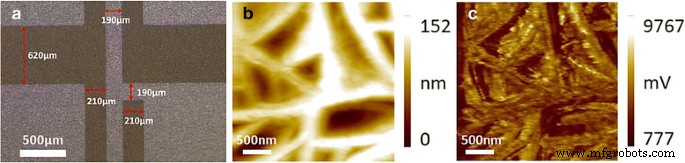
un Morfología de la superficie del sensor propuesto después de la tecnología de grabado. b Morfología superficial y c Imágenes de fase PFM de la película PVDF del sensor
Un resultado típico de la señal de salida se muestra en la Fig. 3a cuando se aplicó una presión constante de 98,1 kPa en uno de los electrodos cuadrados del sensor [17]. La x -eje y y -eje muestra el tiempo y el voltaje de salida del electrodo cuadrado del sensor, respectivamente. El voltaje de salida se convirtió a partir de la carga (Q) generada por la película de PVDF del sensor. Basado en la ecuación de piezoelectricidad (donde d 33 es una constante piezoeléctrica cuando la dirección de polarización es la misma que la dirección del campo eléctrico y F Z significa que se aplica presión sobre la z -dirección con la misma dirección de d 33 ), se podría establecer una relación entre el voltaje de salida y la presión. Los datos brutos se obtuvieron aplicando un bloque de banda de 49–51 Hz. La línea de flecha de esta figura indica las señales de aproximadamente 123,1 mV que fueron generadas por la presión aplicada en el sensor. El voltaje de salida del sensor por la presión se muestra claramente en la señal con bajo ruido y alta relación señal / ruido. Para confirmar la propiedad sincrónica del conjunto de sensores, se aplicó una presión igual de 113,2 kPa en cuatro unidades del sensor, simultáneamente. Las señales de voltaje de salida inducidas por la presión se muestran en la Fig. 3b. Se obtuvo casi el mismo valor de salida de aproximadamente 190 mV de las cuatro unidades del sensor al mismo tiempo, lo que sugiere que la matriz de sensores exhibió una alta estabilidad y propiedad sincrónica al aplicar presión multipunto. Para calibrar la matriz de sensores, se aplicaron diferentes presiones en el rango de 60-150 kPa en la matriz de sensores; la tensión de salida frente a la presión aplicada se obtuvo y se trazó como la curva de calibración que se muestra en la Fig. 3c, que muestra una relación lineal. La pendiente de la curva lineal es de aproximadamente 2,9 mV / kPa y hay una desviación de -159,2 mV en la curva de calibración.
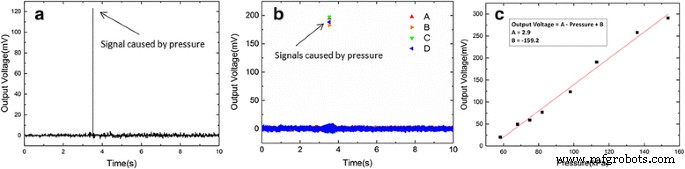
Voltajes de salida filtrados para a un electrodo cuadrado y b cuatro cuadrados de electrodos de la matriz de sensores. c Ajuste de la curva de calibración del revestimiento del sensor propuesto
La respuesta de salida de retención y liberación de un electrodo cuadrado del sensor se obtuvo aplicando una presión de impulso con varias frecuencias. La curva trazada en la Fig. 4a muestra la respuesta típica del sensor aplicando la presión de impulso de aproximadamente 75,1 kPa con una frecuencia de 90 Hz. El voltaje de salida positivo corresponde a la compresión del cuadrado de electrodos de la matriz de sensores, y el voltaje de salida negativo corresponde a la relajación. Como se ve en el recuadro de la Fig. 4a, la respuesta de salida de retención y liberación similar también se ha observado en la película de PVDF piezoeléctrico desnudo [18]. El tiempo de respuesta del voltaje de salida del sensor es menor a 2 ms, lo que sugiere que el sensor exhibe una buena propiedad de respuesta electromecánica. Las presiones de impulso dentro del rango de 60-150 kPa se aplicaron en la matriz de sensores. Las curvas de respuesta de salida de retención y liberación se muestran en la Fig. 4b. El sensor muestra una característica estable de respuesta electromecánica con un tiempo de respuesta de aproximadamente 2 ms bajo diferentes presiones, y los voltajes de salida del sensor bajo diferentes presiones son consistentes con la curva de calibración lineal obtenida anteriormente.
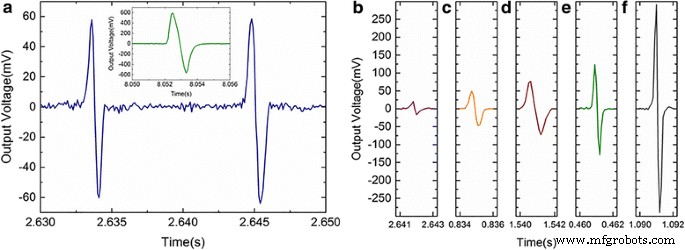
La respuesta de salida de retención y liberación de las presiones de a 75,1 kPa, b 58,2 kPa, c 67,8 kPa, d 81,9 kPa, e 98,1 kPa y f 153,6 kPa; el recuadro muestra la respuesta de salida de retención y liberación obtenida de la película PVDF desnuda
A continuación, se estudia la aplicación de presión sobre un punto selectivo. La interferencia de la señal se muestra entre las matrices adyacentes, cuando se aplicó presión sobre el electrodo de una de las matrices. La simulación de la interferencia de la señal se realizó a través de COMSOL Multifísica en arreglos. El área de cada electrodo es de 1,4 mm 2 . La geometría de la estructura se muestra en la Fig. 5a. La deformación adicional, cuando se aplicó presión sobre el electrodo A, se ve en la Fig.5b, lo que indica que la deformación aumenta con la distancia del electrodo A. Se estudió la interferencia en la diferencia de potencial con un nivel de presión de 20 ~ 80 kPa, que se muestra en Figura 5c. La diferencia de potencial y la presión exhiben una relación lineal con una pendiente de 0.028 mV / kPa y una intersección de 5 × 10 −4 mV, lo que implica una interferencia de muy bajo nivel. Una presión inferior a 178 kPa generaría una interferencia de señal inferior a 5 mV, lo que es insignificante [16, 17]. Además, se ha investigado la dependencia de la interferencia del tamaño del electrodo de la matriz. La Figura 5d muestra el resultado con tamaños de electrodo de 1,2, 1,0 y 0,8 mm 2 . Muestra que todavía se puede observar una relación lineal entre la diferencia de potencial de interferencia y la presión (en el rango de 20 ~ 60 kPa) en el electrodo más pequeño. Las pendientes de ajuste para el voltaje de interfaz son 0.01748, 0.01181 y 0.00574 mV / kPa, respectivamente, para las tres estructuras con la observación de potencial de interferencia reducido en un tamaño de electrodo más pequeño.
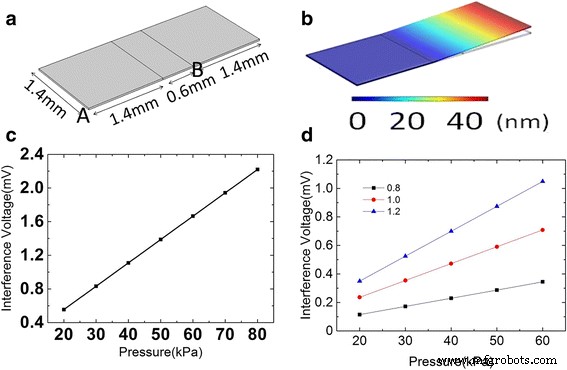
un Dimensiones físicas utilizadas para simulación teórica. b Desplazamiento y c Ajuste de la curva del revestimiento entre el voltaje de interferencia y la presión aplicada con un tamaño de matriz de 1,4 mm. d Resultados obtenidos utilizando tamaños de matriz de 0,8, 1,0 y 1,2 mm, respectivamente
Para una aplicación práctica simple, el sensor se aplicó para medir el estado de presión y la distribución del dedo de la mano humana. Como todos sabemos, el movimiento complejo de los dedos consta de algunas habilidades básicas, como shiatsu, amasar, frotar, friccionar, etc. [19]. En nuestros experimentos, se seleccionaron los tres movimientos más utilizados, incluidos shiatsu, amasar y frotar, para probar el estado de presión y la distribución del dedo. La figura 6 muestra un chasquido de la distribución de presión del dedo pulgar caracterizado por el sensor durante los tres movimientos del dedo, respectivamente. En la Fig. 6a, se pudo ver claramente que la presión de 76 kPa se enfocó en el centro del dedo pulgar durante el movimiento de shiatsu, que son bastante diferentes con el amasado y el frote que se ven en las Fig. 6b, c, respectivamente. La Figura 6b muestra que la presión desde la parte frontal del dedo pulgar es más alta que las otras partes del dedo durante el movimiento de amasado, mientras que la presión del dedo pulgar es bastante uniforme (aproximadamente 68 kPa) durante el movimiento de frotamiento, como se muestra en la Fig. 6c. La distribución de la presión observada en el dedo es algo similar a los informes anteriores en observación clínica [17, 20]. Según nuestras mediciones, el sensor de deformación basado en una película flexible de PVDF ferroeléctrico resultó ser sensible para caracterizar el complejo movimiento de los dedos. Se espera explorar la habilidad del dedo humano con mayor precisión mediante el uso del sensor propuesto, y también sería útil desarrollar el robot para reemplazar los dedos humanos en el futuro.
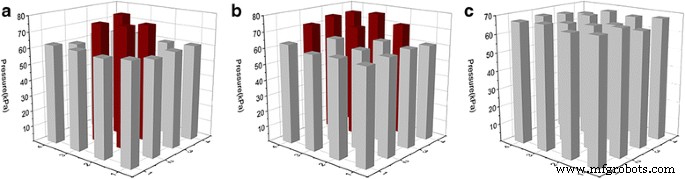
El estado de presión y la distribución del movimiento del dedo pulgar caracterizados por el sensor propuesto: a el shiatsu, b el amasado y c el frote
En conclusión, se ha fabricado y empaquetado con PDMS una matriz de sensores 4x4 con 16 unidades de condensadores basados en la película delgada de PVDF piezoeléctrico. La matriz de sensores exhibe propiedades flexibles y de alta sensibilidad. La respuesta de salida de retención y liberación del sensor se obtuvo aplicando presiones de impulso con varias frecuencias, lo que indicó que el conjunto de sensores podría generar señales de voltaje de 20 a 300 mV en 2 ms al aplicar una presión en el rango de 60 a 150 kPa. Las distribuciones de presión obviamente diferentes en el dedo durante el movimiento del dedo de la mano humana se han observado utilizando el sensor propuesto, que se espera que explore la habilidad de los dedos humanos con mayor precisión.
Abreviaturas
- PFM:
-
Microscopía de fuerza de respuesta piezoeléctrica
- PVDF:
-
Poli (fluoruro de vinilideno)
Nanomateriales
- Sensor de presión arterial:funcionamiento y sus aplicaciones
- Sensor piezoeléctrico:circuito, especificaciones y aplicaciones
- Infineon:sensor de presión barométrica ultrapequeño
- El sensor de presión barométrica ofrece una mayor precisión
- Sensor de presión barométrica digital BMP180 I2C
- Proyecto de IoT basado en Raspberry PI que conecta el sensor DHT11
- Nano grafema, memoria transparente flexible basada en silicio
- Sensor de presión portátil de metal líquido
- Película de sensores para la industria aeroespacial
- Microsensores de flujo ultrasensibles
- ¿Qué es un sensor piezorresistivo?