


Los 11 conceptos básicos de programación de robots más útiles
¿Qué propiedades básicas son más útiles para saber cuando estás comenzando con la programación de robots?
Ya sea que sea nuevo en el mundo de la robótica o simplemente esté buscando mejorar sus habilidades de programación, estos son los principales conceptos básicos de programación de robots que es bueno saber.
A veces puede parecer que necesita un título en robótica para comenzar con la programación de robots. Los enfoques convencionales de la programación de robots industriales parecen difíciles de comprender para los nuevos programadores de robótica.
Sin embargo, con una buena base de robótica y un buen software de programación de robots, puede comenzar fácil y rápidamente.
Estos son los 11 conceptos básicos de programación de robots más útiles:
1. Partes básicas de un robot
Antes de comenzar a aprender a programar un robot, es útil comprender las partes básicas de cualquier robot industrial. De esa manera, al menos te sentirás cómodo con la máquina física que estarás programando.
Por ejemplo, las partes más básicas de un robot industrial de 6 DoF son:
- Brazo del manipulador
- Efector final
- Controlador
- Fuente de energía
- Sensores (si los hay)
Los componentes variarán ligeramente según el tipo de robot.
2. Grados de libertad
Ya he introducido un concepto vital en robótica:Grados de libertad (DoF).
El DoF de un robot especifica con cuántos ejes independientes se puede mover el robot. Por ejemplo, un brazo manipulador de 6 grados de libertad tendrá 6 ejes controlables de forma independiente. Algunos DoF son "revolutos" (es decir, giran alrededor de un punto) y algunos son "lineales" (es decir, se mueven a lo largo de una línea). Es útil familiarizarse con el DoF de cualquier robot antes de programarlo.
3. Articulaciones y Efectores Finales
El "extremo comercial" de un robot (es decir, la parte que opera en la tarea) se conoce como el "efector final". Cuando está programando, generalmente lo que más le interesa es dirigir el efector final del robot a ubicaciones particulares.
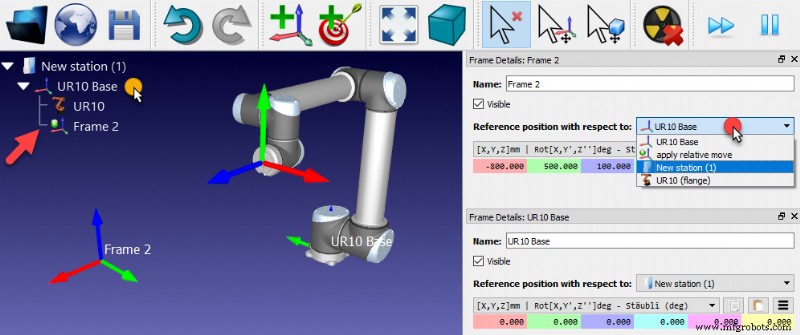
Para mover el robot, debe enviar instrucciones con las posiciones deseadas de cada uno de los DoF del robot. Si está utilizando un software como RoboDK, puede simplemente programar la posición deseada del efector final directamente en lugar de enviar posiciones específicas de las articulaciones.
4. Pose:Posición y Orientación
¿Cómo se programa el efector final para indicarle adónde ir?
La posición y orientación del efector final del robot (o cualquier otra ubicación que programe) se combinan para formar la "postura". Debe especificar la pose de cualquier ubicación a la que se moverá el robot en su programa. El método más común para especificar una pose en la programación es a través de los ángulos de Euler.
Para obtener más información, consulte nuestro artículo Robot Euler Angles:The Essential Primer.
5. Punto central de la herramienta (TCP)
Como estamos más interesados en la pose del efector final cuando estamos programando un robot, a menudo usamos el término Punto central de la herramienta para referirnos al centro operativo de la herramienta.
Estos son algunos ejemplos de diferentes efectores finales:
- Pistola de pegamento — Puede configurar el TCP para que esté en la punta del arma.
- Pinza — El TCP podría estar en el centro de los dedos de la pinza.
- Pistola de soldar — El TCP puede estar a unos pocos milímetros de la punta de la pistola, donde la llama está más caliente.
Como programador, usted elige dónde tiene más sentido colocar el TCP del robot.
6. Cinemática
Uno de los aspectos más desafiantes de la robótica es la cinemática. Esto solo significa la disposición geométrica del robot. La cinemática se representa como una ecuación o algoritmo bastante grande.
La ecuación cinemática directa responde a la pregunta "Si configuro las articulaciones del robot en una posición particular, ¿dónde terminará el TCP?"
El algoritmo cinemático inverso responde a la pregunta opuesta “Si quiero que el TCP termine en esta posición, ¿en qué posición debo colocar las articulaciones?”
Con un buen software de programación de robots, probablemente no necesite formular su propia cinemática, pero puede ser útil para comprender el concepto básico.
7. Límites conjuntos
Las ecuaciones cinemáticas describen al robot utilizando geometría y matemáticas puras. Sin embargo, los robots son máquinas físicas. El robot físico a menudo no puede alcanzar todas las posiciones que la geometría dice que puede.
Introducimos límites de articulaciones en la programación para limitar el movimiento de las articulaciones del robot solo a posiciones que son físicamente posibles. Simplemente le dicen al programa “Esta articulación no puede moverse más allá de este cierto ángulo”.
8. Tipos de movimiento
Cuando está programando el robot, hay diferentes tipos de movimientos que puede hacer que el robot realice.
Los 3 movimientos básicos son:
- Movimiento conjunto — Este es un movimiento rápido y brusco en el que cada articulación intenta llegar a su posición objetivo lo más rápido posible. Para evitar colisiones, los movimientos de las articulaciones solo deben programarse cuando el robot se mueve en el espacio libre.
- Movimiento lineal — Este es un movimiento controlado a lo largo de una línea entre dos poses. El robot necesariamente se moverá más lento con un movimiento lineal, pero tampoco introducirá colisiones inútiles.
- Movimiento circular — Como un movimiento lineal, el robot se mueve en una línea controlada, esta vez a lo largo de una trayectoria circular.
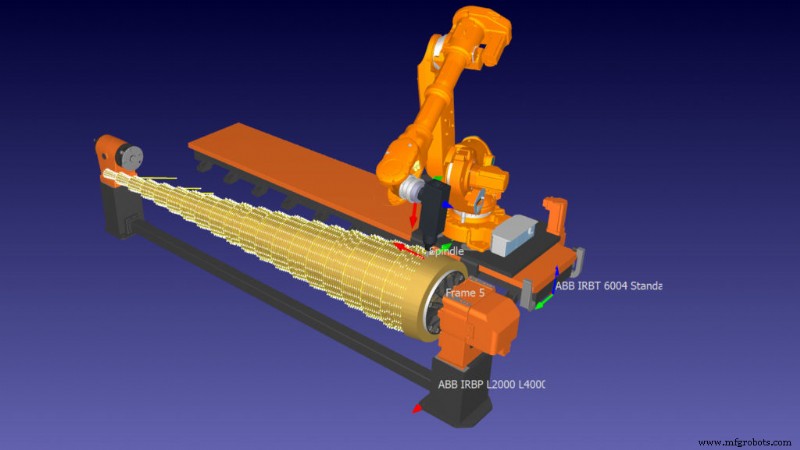
9. Simulación y Programación Offline
Hay muchas formas diferentes de programar un robot, incluido "ensuciarse las manos" con el lenguaje de programación (generalmente complejo) proporcionado por el fabricante del robot.
La simulación y la programación fuera de línea ofrecen un método de programación más sencillo. En lugar de programar el robot físico directamente, programa un modelo simulado del robot usando comandos intuitivos. Luego, el software convierte el programa en un código que el robot físico puede entender.
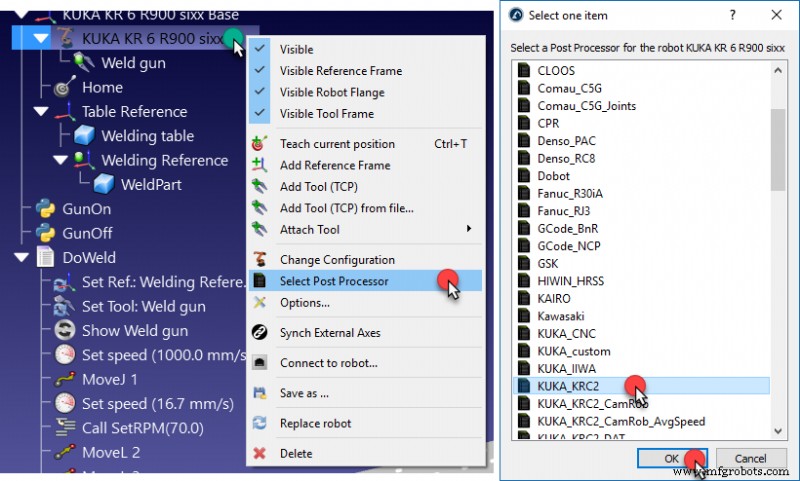
10. Post-procesadores
La parte de un software de programación fuera de línea que convierte el programa del robot se conoce como posprocesador. El software de programación tendrá un posprocesador diferente para cada fabricante de robots, a veces más de uno.
Puede obtener más información sobre los posprocesadores en nuestro artículo Posprocesadores robóticos:todo lo que necesita saber.
11. Depuración
Cualquiera que sea el método de programación que esté utilizando, una habilidad básica vital es la depuración. Siempre debe depurar su programa para asegurarse de que funciona como lo desea antes de configurar su robot para que se ejecute en un entorno de producción.
La programación fuera de línea le brinda un paso de depuración adicional porque programa un modelo simulado del robot antes de descargar el programa al robot físico, lo que reduce la posibilidad de errores.
Si desea comenzar a programar robots de inmediato, puede descargar una versión de prueba gratuita de RoboDK aquí.
¿Con qué aspectos básicos de la programación de robots le gustaría recibir ayuda? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- Los beneficios del monitoreo remoto, la programación remota y el mantenimiento predictivo
- Robots articulados:Guía del robot industrial más familiar
- Robots cartesianos:Guía de la tecnología de robots más escalable
- Robots SCARA:Guía del robot más versátil y buscado
- Comentario:comprensión de los métodos de programación de robots
- ¿Qué es el filamento de TPU? La guía básica y útil.
- ¿Cuándo es el momento adecuado para invertir en herramientas de programación de robots?
- Programación de robots industriales para principiantes
- Elegir el software de selección de robots adecuado
- Robot de recubrimiento de Fanuc:el P-250iA
- Las operaciones internas del robot Motoman K6