


5 formas expertas de programar un robot FANUC
Ha decidido que un robot FANUC es la mejor opción para su aplicación elegida.
Pero, ¿cuál es la mejor manera de programar un FANUC?
¿Tiene alguna opción real o necesita usar la opción predeterminada proporcionada por el fabricante?
Con sus distintivos robots de color amarillo brillante, el fabricante japonés de robots FANUC es una opción popular para las personas que buscan agregar automatización robótica a su negocio.
Desea asegurarse de aprovechar al máximo el robot elegido... y eso significa elegir el mejor método de programación.
Por qué la forma predeterminada de programar un FANUC es restrictiva
Puede suponer que debe utilizar el método de programación predeterminado proporcionado por FANUC. Esta es una suposición común; ciertamente es cierto que muchas personas usan el método predeterminado para programar sus robots FANUC.
Hay 2 métodos predeterminados de programación con un robot FANUC.
Estos son:
- TP:este es el lenguaje utilizado por los dispositivos de enseñanza de FANUC. Son editables por el dispositivo de enseñanza y se almacenan como un archivo binario.
- Karel:este es un lenguaje de programación derivado de Pascal (como lo son muchos lenguajes de robots industriales). Esto se puede usar para programar el robot usando un editor de texto.
Si usted o alguien de su equipo tiene experiencia en programación de Karel, o si tiene experiencia en el uso de dispositivos de enseñanza de FANUC, estos métodos de programación pueden ser una opción viable para usted.

Sin embargo, los métodos predeterminados de programación de robots suelen ser mucho más difíciles de usar de lo que deberían. También extrañan la poderosa funcionalidad que viene con otros métodos de programación.
Es posible que te falte una programación más intuitiva y potente si solo optas por la opción predeterminada.
5 formas expertas de programar un robot FANUC
La mejor manera de programar un robot es aquella que utiliza sus habilidades existentes al máximo. Uno que también le permite acceder a todas las capacidades que necesita del robot.
Aquí hay 5 excelentes maneras en que puede programar su robot FANUC; maneras que hacen el mejor uso de sus habilidades y las habilidades del robot:
1. Con el Teach Pendant
Por supuesto, los expertos en programación de FANUC utilizan ampliamente la forma predeterminada de programar un robot. El colgante de enseñanza que viene con el robot le permitirá acceder a muchos aspectos de su funcionalidad principal.
La programación de Teach Pendant implica mucho trabajo; presionar botones, navegar por los menús y empujar el robot hacia la posición deseada a simple vista (una técnica conocida como "jogging"). La creación de un programa de cualquier tamaño y complejidad razonables es un proceso largo. Es un proceso igualmente laborioso para realizar cambios en el programa más adelante.
La programación del Teach Pendant puede ser poderosa en las manos adecuadas. Sin embargo, el principal problema es que es un método de programación en línea que lleva mucho tiempo. Esto significa que el robot necesita estar fuera de servicio para reprogramarlo, lo que degrada su productividad.
2. Con programación fuera de línea basada en texto
Puede reducir los efectos negativos de la programación en línea utilizando en su lugar la programación fuera de línea con su robot FANUC. Esto significa que usted crea el programa en una computadora. Luego puede descargarlo al controlador del robot cuando haya terminado.
La forma más rudimentaria de programación fuera de línea es codificar el programa en un editor de texto; utilizando el lenguaje de programación Karel de FANUC. Sin embargo, esto requiere que tenga mucha experiencia programando robots FANUC. Carece de cualquier forma de depurar el programa a medida que avanza. Como resultado, la fase de depuración en el robot físico será más larga y causará retrasos similares a los de la programación en línea.
3. Con Programación Gráfica Fuera de Línea
Una mejor manera de programar su robot FANUC fuera de línea es usar un software de programación fuera de línea dedicado. Esto le permite crear y depurar el programa del robot. Puede hacer esto usando un simulador gráfico antes de que necesite sacar el robot de producción.
Por supuesto, algunas herramientas de programación fuera de línea son más fáciles de usar que otras. Por ejemplo, RoboDK es un software de simulación y programación fuera de línea que cualquiera puede usar, incluso sin experiencia en robótica.
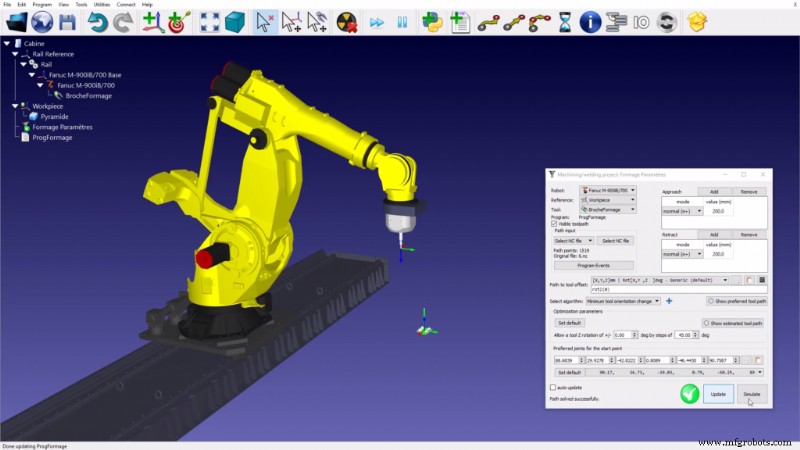
RoboDK proporciona una interfaz gráfica intuitiva y brinda capacidades adicionales a la programación de su robot. Estos no están disponibles con métodos convencionales como; asistente de mecanizado dedicado, capacidad de impresión 3D y mucho más.
4. Con tu lenguaje de programación favorito
Si es un programador experimentado pero no tiene mucha experiencia específica con FANUC o robótica, es posible que se pregunte si puede programar su robot usando su lenguaje favorito.
En el pasado, esto habría sido difícil, ya que habría implicado la creación de bibliotecas de contenedores y posiblemente bibliotecas de comunicación de red para interactuar con el controlador del robot. Pero ahora es posible y fácil.
Con RoboDK, puede usar cualquiera de varios lenguajes de programación de alto nivel para programar su FANUC. Puede probar el programa sin conexión en el simulador antes de descargarlo al robot.
5. Con una sonda de mano
Los cuatro métodos anteriores implican al menos cierta comprensión de la geometría y la programación de robots. Incluso con software gráfico fuera de línea, donde puede arrastrar el robot en la simulación gráfica. Todavía debe pensar en cómo se relaciona el entorno simulado con el entorno del mundo real.
Habiendo dicho todo eso, hay una forma más experta de programar un robot FANUC que es incluso más fácil de usar que el resto.
Con RoboDK TwinTrack, puede crear el programa simplemente rastreando el movimiento deseado del robot usando una sonda de mano. El robot luego reproduce ese movimiento exacto. TwinTrack también es compatible con la programación fuera de línea, por lo que no necesita afectar la producción del robot.
¿Cuál es la mejor manera de programar su robot FANUC?
Entonces, ¿cuál de estos métodos de programación será mejor para ti?
Como se mencionó, el mejor método de programación es el que hace el mejor uso de sus habilidades existentes como programador y le permite acceder a la mayoría de las capacidades del robot.
Claro, el método predeterminado que viene con los robots de FANUC podría cumplir con estos criterios.
Con las otras opciones enumeradas en este artículo, puede acceder a funciones más potentes más fácilmente. No es necesario que presione incesantemente los botones del control remoto del robot ni que se enrede con el lenguaje de programación Karel.
Si desea intentar programar su FANUC con RoboDK, puede obtener una versión de prueba gratuita en la página de descarga de RoboDK.
Para obtener más instrucciones sobre cómo programar un robot FANUC con RoboDK, consulte nuestra página de documentación dedicada.
¿Qué dificultades tiene al programar robots FANUC? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- Programación del microprocesador
- 5 pasos para usar la programación fuera de línea con un robot FANUC
- Programación de robots CNC en 7 sencillos pasos
- Los 11 conceptos básicos de programación de robots más útiles
- Programación de robots industriales para principiantes
- Nuevas formas de automatizar con robótica en 2022
- El mercado de robots:Fanuc Robotics
- Robot de recubrimiento de Fanuc:el P-250iA
- Robot de recolección Fanuc de alta velocidad
- Programación de robots con RobotStudio de ABB
- El robot de pintura Fanuc P-50iB