


Proyecto Fin de Carrera de Mecatrónica
Este fue mi Proyecto de Fin de Carrera de Mecatrónica en la Facultad de Ingeniería Mecánica de Skopje. Su objetivo era desarrollar un dispositivo que permitiera la interacción de los movimientos reales del brazo con modelos informáticos en 3D. Integré tres campos diferentes en un solo dispositivo, t.e. Ingeniería mecánica, eléctrica e informática:
En el siguiente vídeo podéis ver una presentación del proyecto. Este es su contenido:
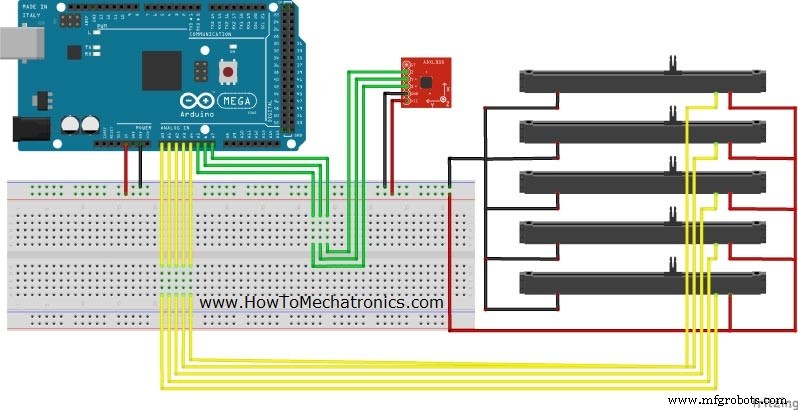
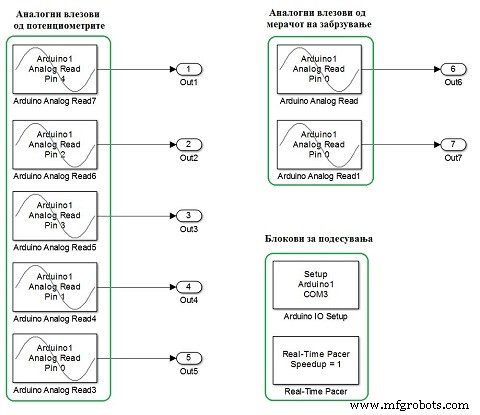
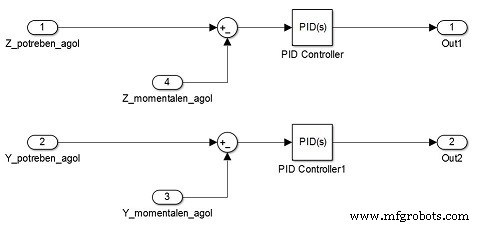
El acelerómetro se utiliza para rastrear la orientación del brazo. A medida que el brazo se mueve, los valores de los ejes X, Y y Z del acelerómetro cambian y se leen en las entradas analógicas de la placa Arduino. Según ellos, el modelo 3D también se mueve.
Los potenciómetros se utilizan para seguir la posición de los dedos. Adjunté un resorte (muelle de pluma) a cada uno de los potenciómetros. El resorte mantiene el control deslizante del potenciómetro en una posición determinada y, a medida que los dedos se mueven, se tira del control deslizante y cambia la resistencia del potenciómetro. Esos valores se están leyendo en las entradas analógicas de la placa Arduino y, según ellos, los dedos del modelo 3D también se mueven.
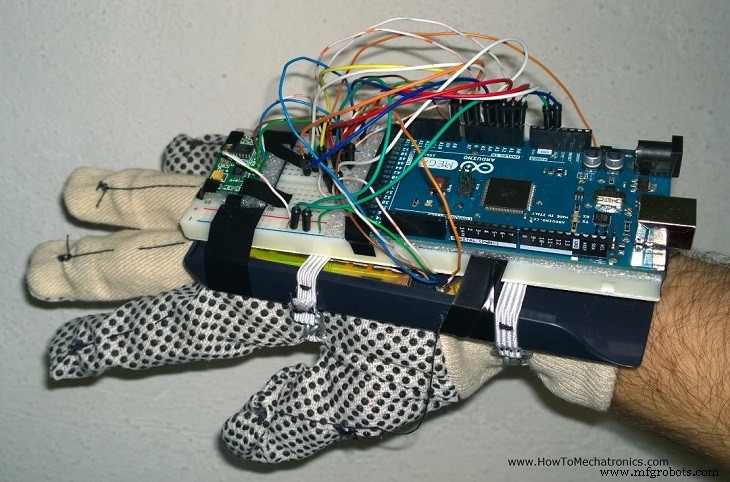
Utilicé una cubierta de plástico de una calculadora como base sobre la cual coloqué los cinco potenciómetros. Encima de ellos puse la placa de pruebas en la que aseguré la placa Arduino y el acelerómetro con una cinta. En la imagen de abajo puedes ver la apariencia final del dispositivo.
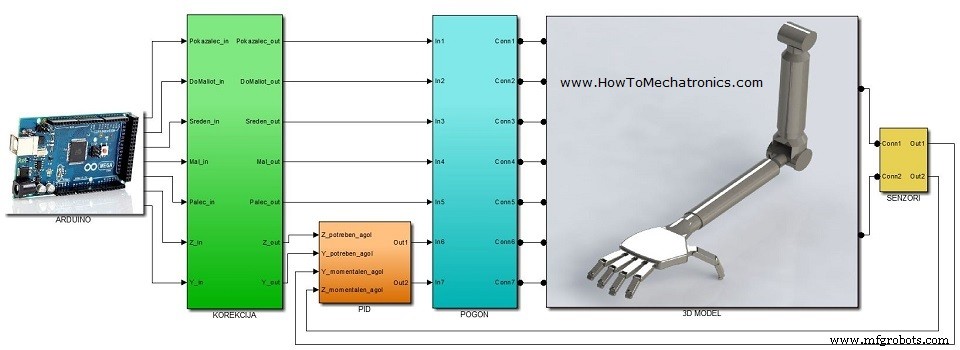
El modelo 3D es una representación de un brazo humano. Primero, lo modelé usando Solidworks y luego lo transfirí a Matlab/Simulink usando SimMechanicsLink de Matworks.
Antes de construir el modelo de Simulink, primero tuve que instalar el paquete Arduino IO, que consiste en la biblioteca de Simulink para la comunicación con la placa Arduino. Además, usando el IDE de Arduino, tuve que cargar el código en la placa Arduino que viene con el paquete para habilitar la biblioteca Simulink. Aquí recomendaría encarecidamente mi Tutorial para Matlab y Arduino IO Package para que pueda comprender el principio de funcionamiento y ver el código.
Organicé mi modelo de Simulink en seis subsistemas:
Puede descargar el modelo de Simulink aquí:
Verifique mi Extensión de este Proyecto.
Reprogramé el Arduino Glove para que funcione como un controlador de juego.
Construyendo el dispositivo
Piezas utilizadas en este proyecto


Esquema del circuito del dispositivo
El modelo 3D

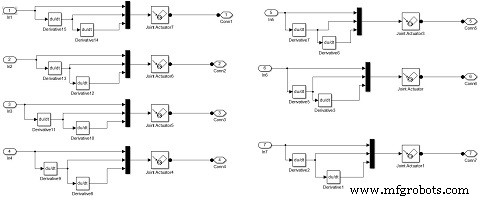
El modelo MATLAB/Simulink

Proceso de manufactura
- Ideas de proyectos basados en sensores para estudiantes de ingeniería de último año
- Smart Pen:Proyecto final para ECE5725
- Hacer Monitor Ambilight usando Arduino
- Juego Arduino Pong - Pantalla OLED
- Detector de frecuencia de audio
- Clon Arduino Tamagotchi - Mascota digital
- Manipulador de interruptor de luz inalámbrico
- Tech-TicTacToe
- Pistola de agua con sensor de movimiento
- Temporizador de cuenta atrás de Arduino
- Arduino Sunflower:Un Sun-Dancer electrónico