


Proyecto de radar Arduino
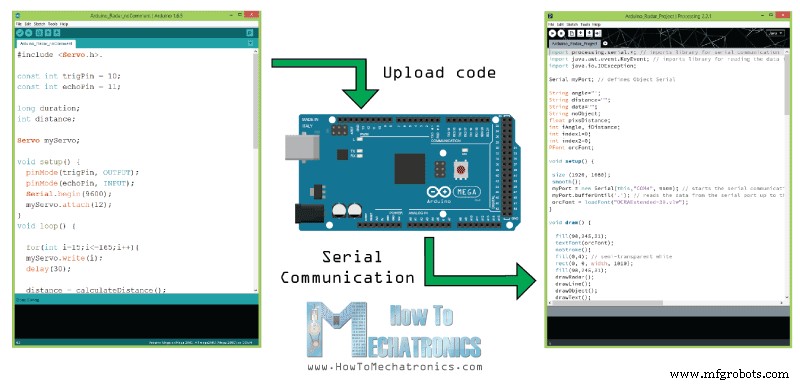
En este tutorial de Arduino, le mostraré cómo puede hacer este radar atractivo utilizando la placa Arduino y el entorno de desarrollo de procesamiento. Puede ver el siguiente video o leer el tutorial escrito a continuación para obtener más detalles.
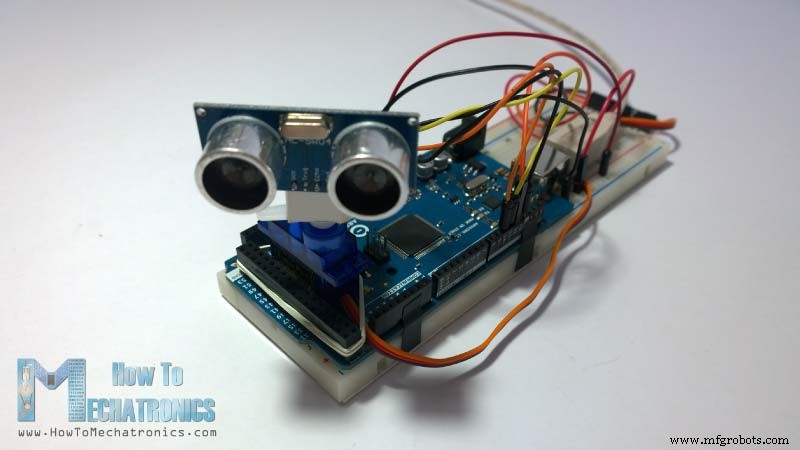
Todo lo que necesita para este proyecto Arduino es un sensor ultrasónico para detectar los objetos, un pequeño servomotor para aficionados para girar el sensor y una placa Arduino para controlarlos. Puede ver el siguiente video o leer el tutorial escrito a continuación.[/column]
Puede obtener estos componentes en cualquiera de los siguientes sitios:
También hay un soporte de montaje especial para el sensor ultrasónico de Banggod. Puede obtenerlos en los siguientes enlaces:
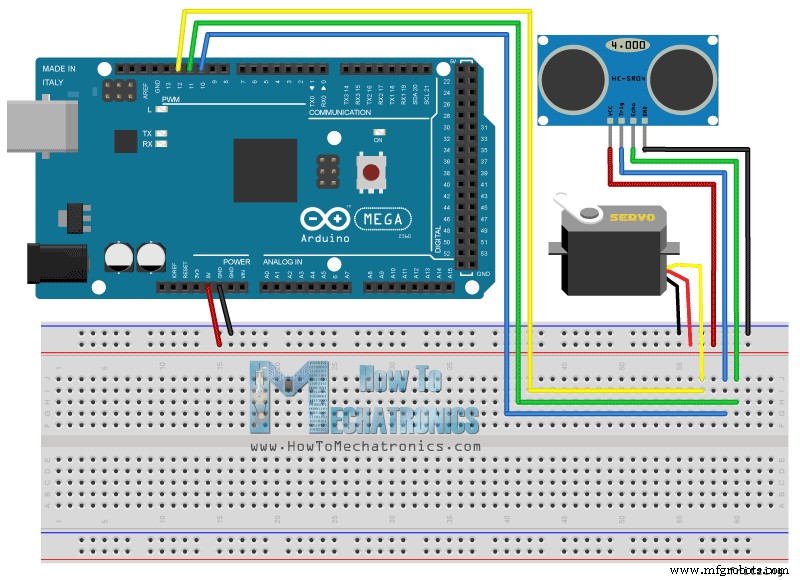
Conecté el sensor ultrasónico HC-SR04 a los pines número 10 y 11 y el servomotor al pin número 12 de la placa Arduino.
Ahora necesitamos crear un código y cargarlo en la placa Arduino que permitirá la interacción entre Arduino y el IDE de procesamiento. Para comprender cómo funciona la conexión, haga clic aquí para visitar mi tutorial de procesamiento y Arduino.
Ahora recibiremos los valores para el ángulo y la distancia medidos por el sensor desde la placa Arduino en el IDE de procesamiento usando el SerialEvent() función que lee los datos del puerto serie y pondremos los valores del ángulo y la distancia en las variables iAngle e iDistance. Estas variables se utilizarán para dibujar el radar, las líneas, los objetos detectados y parte del texto.
Para dibujar el radar hice esta función drawRadar() que consisten en arc() y línea() funciones.
Para dibujar la línea que se mueve a lo largo del radar hice esta función drawLine() . Su centro de rotación se establece con la función translate() y usando la función line() en la que se usa la variable iAngle, la línea se vuelve a dibujar para cada grado.
Para dibujar los objetos detectados hice este drawObject() función. Obtiene la distancia del sensor ultrasónico, la transforma en píxeles y, en combinación con el ángulo del sensor, dibuja el objeto en el radar.
Para el texto en la pantalla hice el drawText() función que dibuja textos en ubicaciones particulares.
Todas estas funciones se llaman en el draw() principal función que se repite todo el tiempo y dibuja la pantalla. También aquí estoy usando este fill() función con 2 parámetros para simular el desenfoque de movimiento y el desvanecimiento lento de la línea en movimiento.
Aquí está la apariencia final del radar:
Aquí está el código fuente de procesamiento completo del radar Arduino:
Simplemente cambie los valores en la función size(), con la resolución de su pantalla.Resumen
Componentes necesarios para este proyecto Arduino
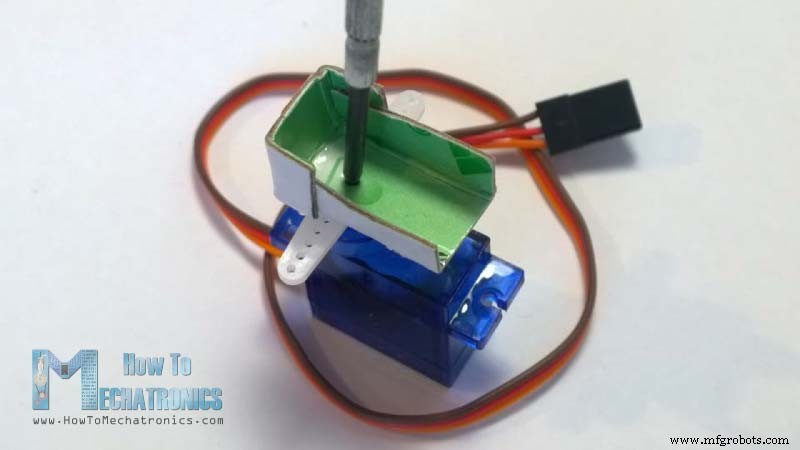
Construyendo el dispositivo

Esquemas del circuito de radar de Arduino
Códigos fuente
Aquí está el código fuente de Arduino con la descripción de cada línea de el código:
// Includes the Servo library
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
Code language: Arduino (arduino)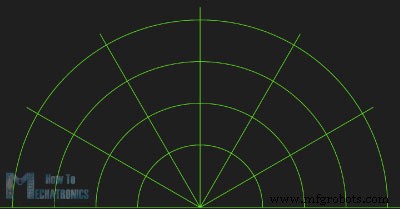
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}Code language: Arduino (arduino)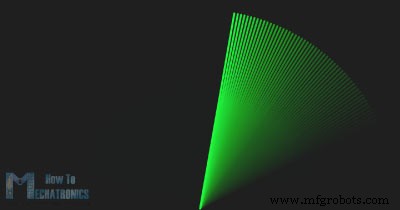
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}Code language: Arduino (arduino)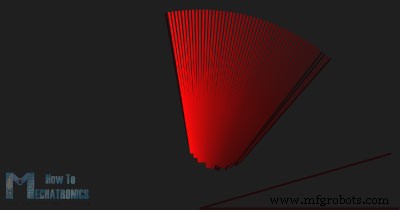
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}Code language: Arduino (arduino)void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}Code language: Arduino (arduino)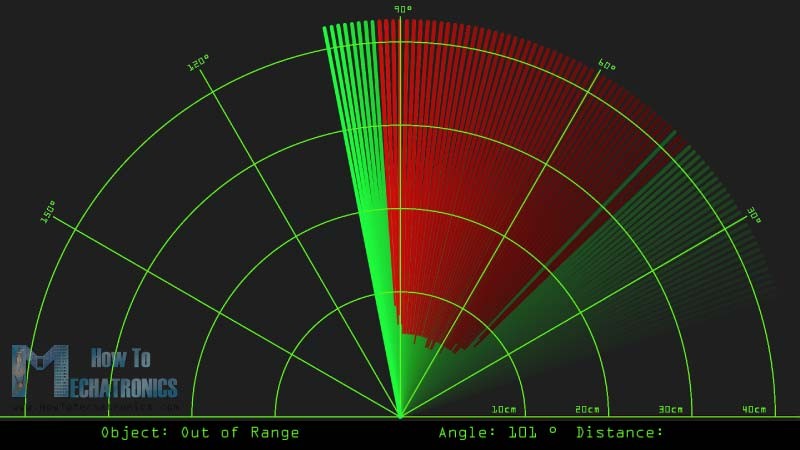
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080);
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",1180,990);
text("20cm",1380,990);
text("30cm",1580,990);
text("40cm",1780,990);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) {
text(" " + iDistance +" cm", 1400, 1050);
}
textSize(25);
fill(98,245,60);
translate(961+960*cos(radians(30)),982-960*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate(954+960*cos(radians(60)),984-960*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate(945+960*cos(radians(90)),990-960*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(935+960*cos(radians(120)),1003-960*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate(940+960*cos(radians(150)),1018-960*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
Code language: Arduino (arduino)Nueva versión actualizada del código Arduino Radar para adaptarse a cualquier resolución de pantalla:
/* Arduino Radar Project
*
* Updated version. Fits any screen resolution!
* Just change the values in the size() function,
* with your screen resolution.
*
* by Dejan Nedelkovski,
* www.HowToMechatronics.com
*
*/
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1920, 1080); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM4", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
orcFont = loadFont("OCRAExtended-30.vlw");
}
void draw() {
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text("Object: " + noObject, width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}Code language: Arduino (arduino)
Proceso de manufactura
- Hacer Monitor Ambilight usando Arduino
- Juego Arduino Pong - Pantalla OLED
- Obstáculos que evitan el robot con servomotor
- Detector de frecuencia de audio
- Clon Arduino Tamagotchi - Mascota digital
- Manipulador de interruptor de luz inalámbrico
- Tech-TicTacToe
- Pistola de agua con sensor de movimiento
- Temporizador de cuenta atrás de Arduino
- Arduino Sunflower:Un Sun-Dancer electrónico
- RC Porsche Car (Proyecto Arduino)