


Introducción al sensor de movimiento IMU (6 DOF)
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 |
Acerca de este proyecto
Hoy estudiaremos sobre el mejor sensor IMU (Unidad de medición de inercia) disponible y descubriremos cómo se puede conectar con un Arduino. Más adelante, en nuestro próximo tutorial, intentaremos visualizar la detección de movimiento en 3D.
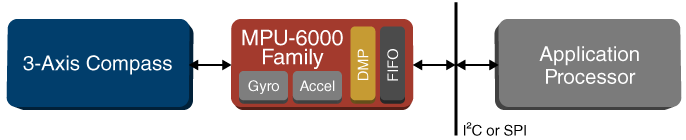
El módulo del sensor IMU que usaremos se centra alrededor de un sensor MPU-6050.
Los dispositivos MPU-6050 combinan un giroscopio de 3 ejes y un acelerómetro de 3 ejes en el mismo troquel de silicio, junto con un Digital Motion Processor ™ (DMP ™) integrado , que procesa complejos algoritmos MotionFusion de 6 ejes.
Estos dispositivos MotionTracking están diseñados para los requisitos de bajo consumo, bajo costo y alto rendimiento de los teléfonos inteligentes, las tabletas y los sensores portátiles.
Cosas que necesita:
HARDWARE:
1) Arduino UNO
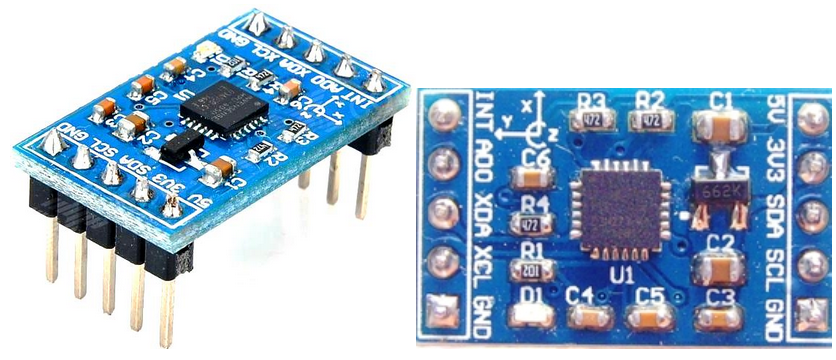
2) Sensor MPU 6050
3) Conexión de cables
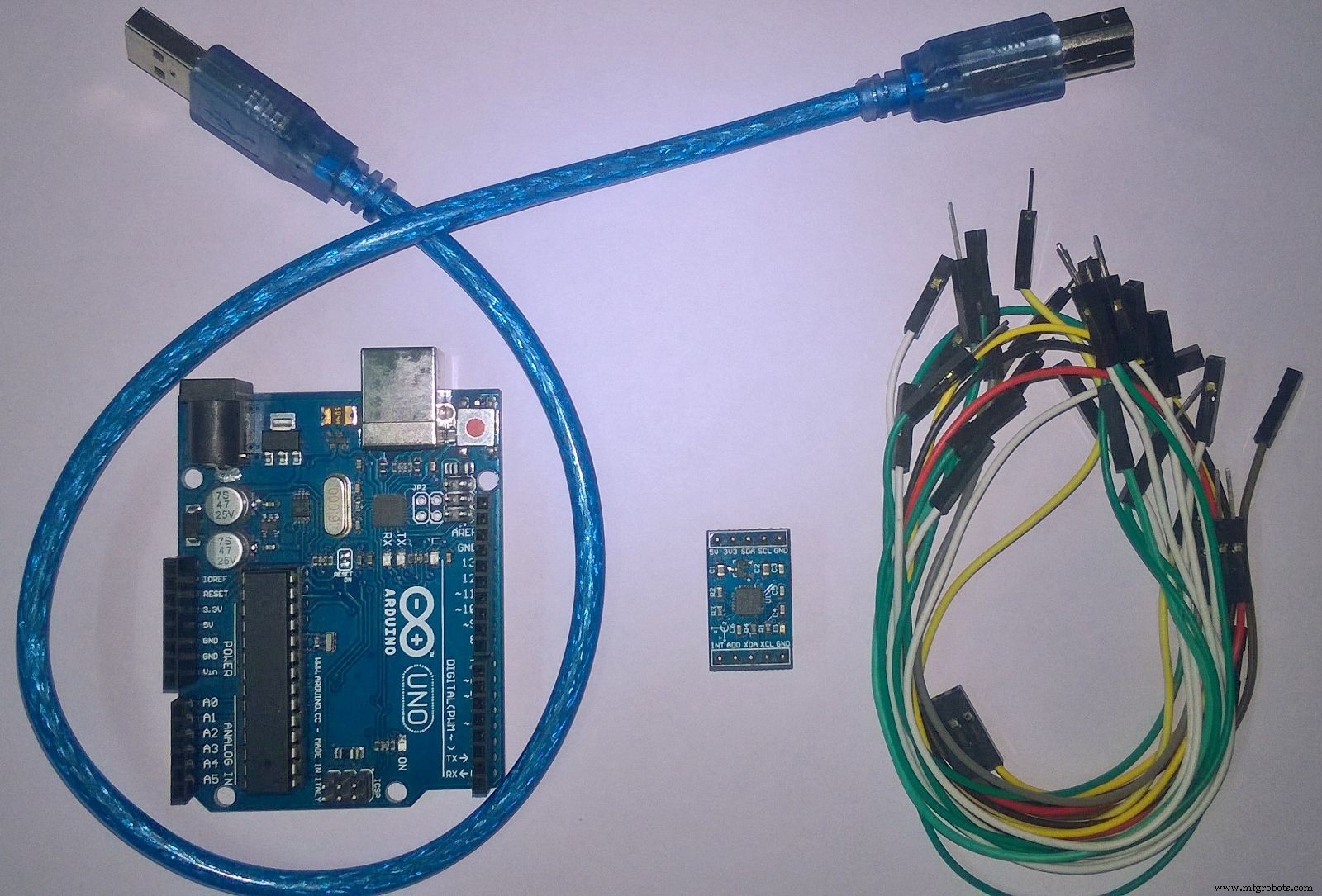
SOFTWARE: IDE de Arduino
Protocolo de comunicación: Este sensor IMU se comunica con Arduino mediante el protocolo de bus I2C.
Puede trabajar con acelerómetros y giroscopios por separado, pero no son tan precisos como este módulo combinado.
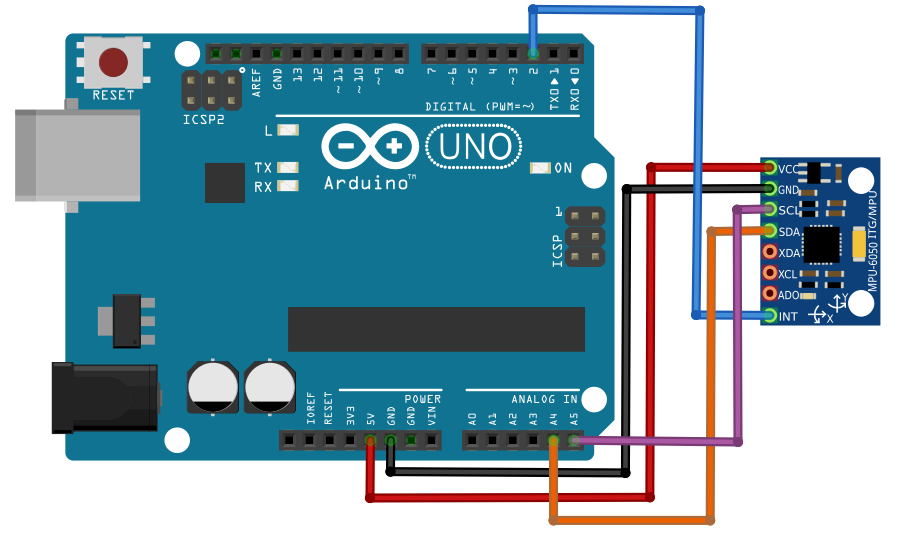
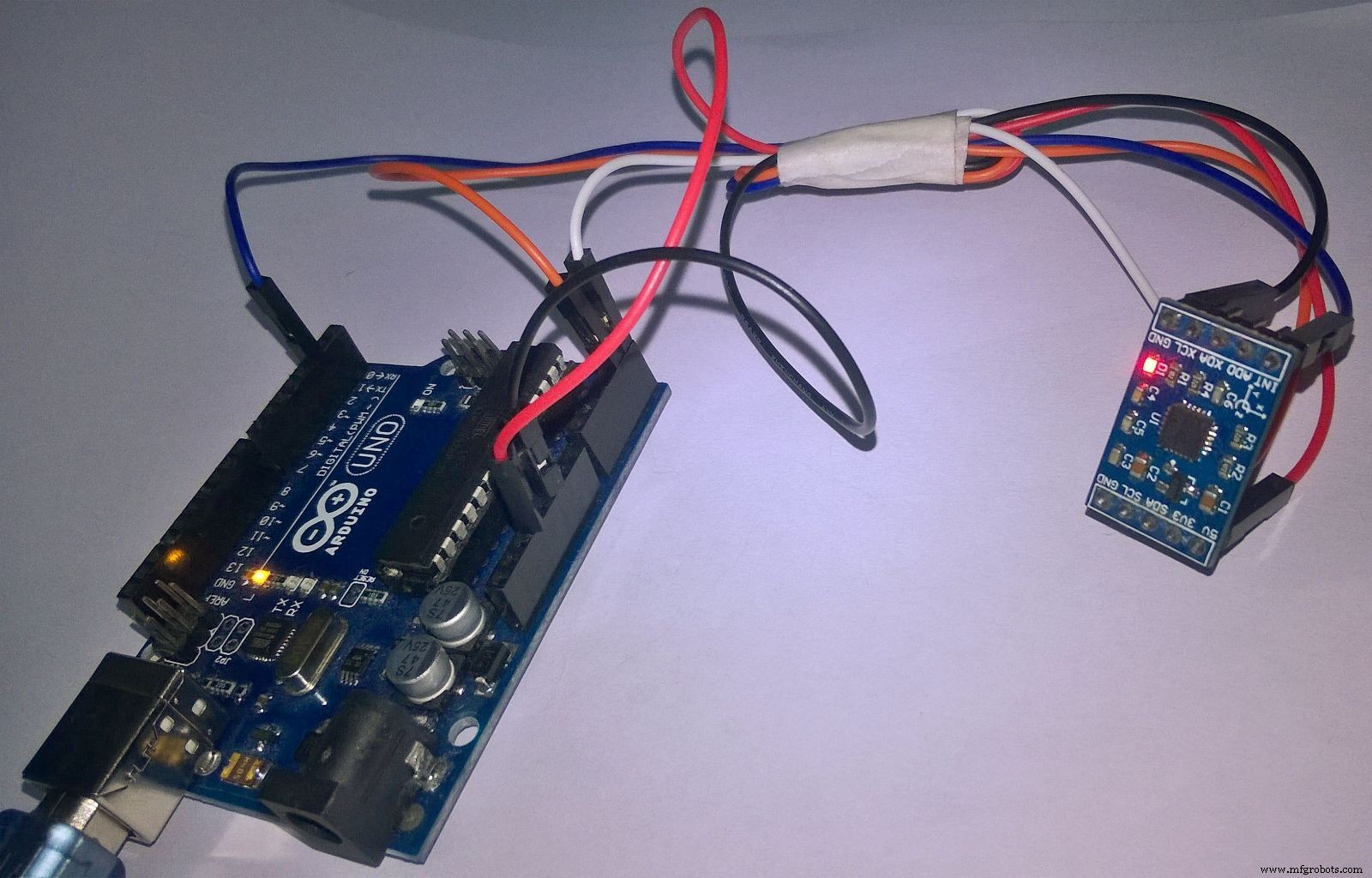
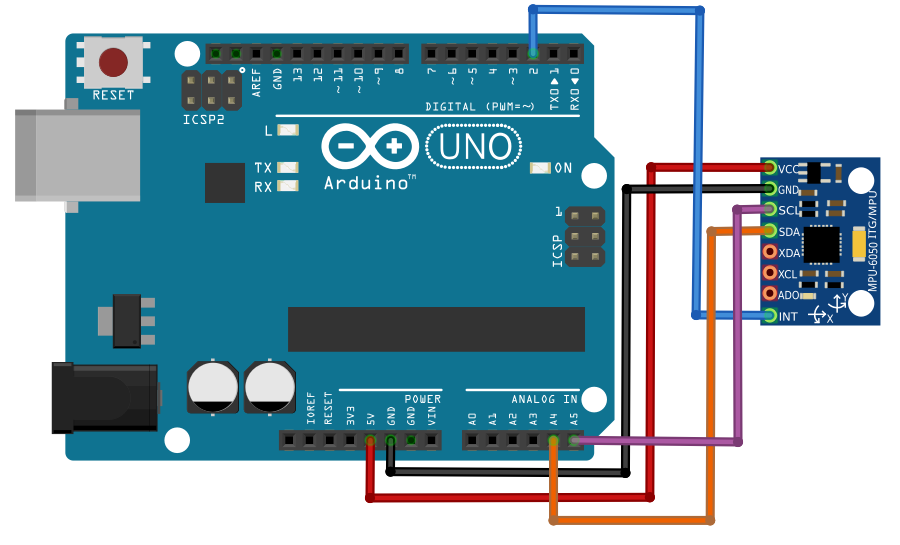
Ahora, pasemos al diagrama de cableado y al perfil de conexión.
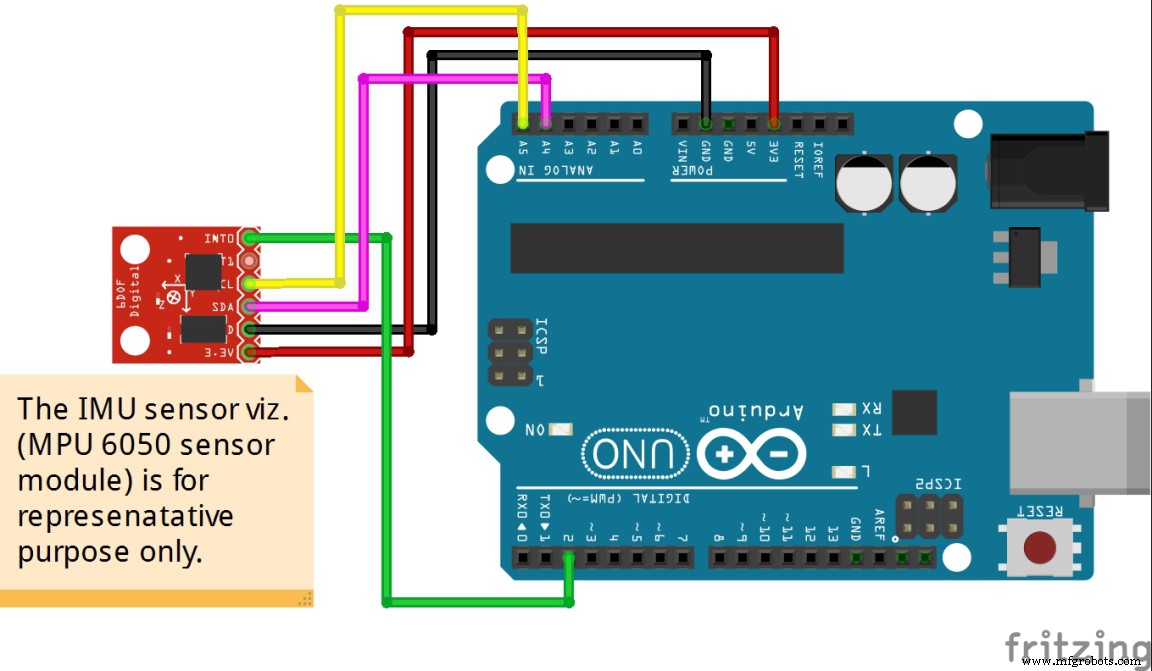
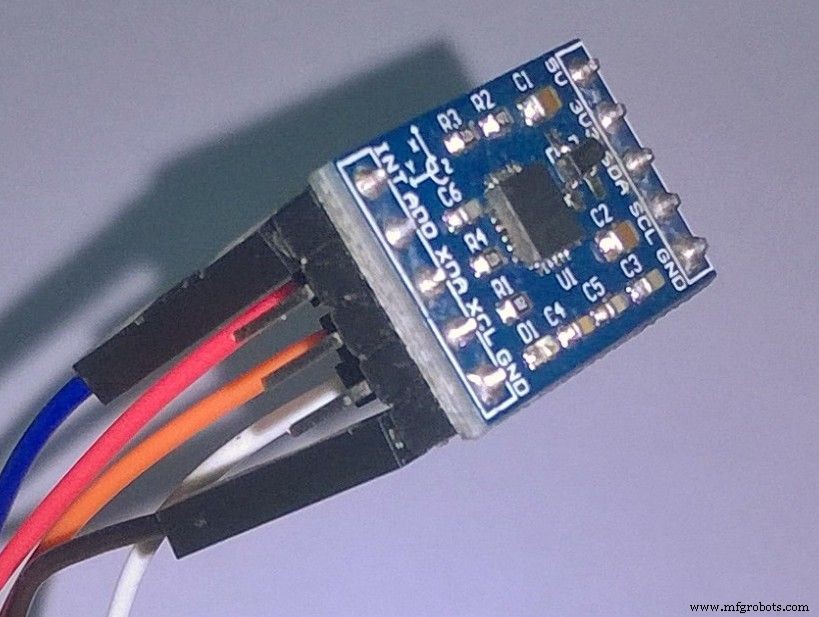
Consulte cualquiera de estas 2 figuras a continuación para conocer la conexión.
Si tiene problemas con las cifras anteriores, no se asuste ...
Revise el perfil del pin de conexión a continuación:
Conecte 5V [IMU MPU-6050] a VCC [ARDUINO]
Conecte SDA [IMU MPU-6050] a Analog IN (A4) [ARDUINO]
Conecte SCL [IMU MPU-6050] a Analog IN (A5) [ARDUINO]
Conecte GND [IMU MPU-6050] a GND [ARDUINO]
Conecte INTPIN [IMU MPU-6050] al pin 2 (pin PWM digital) [ARDUINO]
Aquí, si su módulo MPU 6050 tiene un pin de 5V, entonces puede conectarlo al pin de 5V de su arduino. De lo contrario, tendrá que conectarlo al pin de 3.3V para evitar problemas de sobretensión.
Entonces, ahora que hemos configurado el hardware, es hora de programar el Arduino.
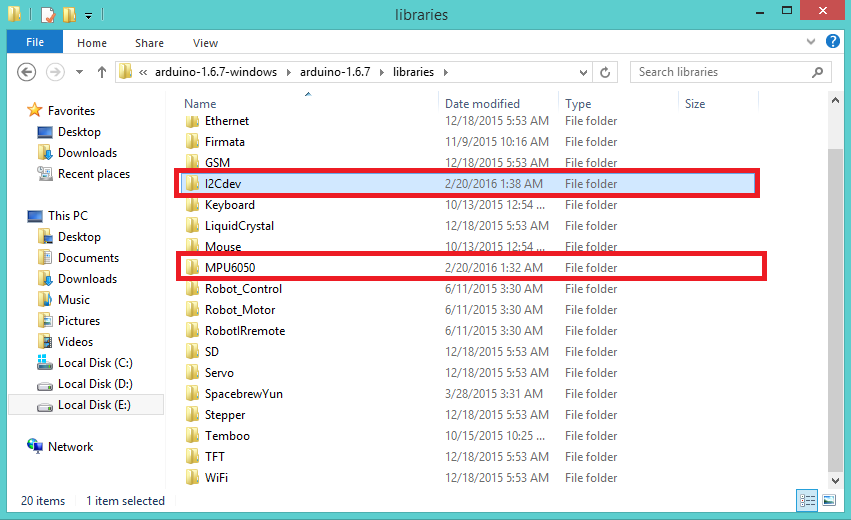
En primer lugar, para probar el MPU 6050, haga clic en este enlace y descargue la biblioteca arduino para MPU 6050. Hay una carpeta zip llamada "MPU6050.zip". Descarga la carpeta y extrae su contenido. Después de hacerlo, copie la carpeta de la biblioteca "MPU6050" y péguela dentro de la carpeta de la biblioteca de Arduino. Es decir, tienes que ir a la ubicación donde está presente la carpeta "bibliotecas" de Arduino y luego, simplemente pegar esta carpeta "MPU6050" dentro de ella.
A continuación, debe descargar otra biblioteca, llamada "I2Cdev.zip" (si no se instaló previamente) y pegarla dentro de la biblioteca de Arduino de la misma manera que la anterior.
Así que ahora, en la carpeta "bibliotecas" de Arduino, tenemos dos nuevas entidades. (Figura 8)
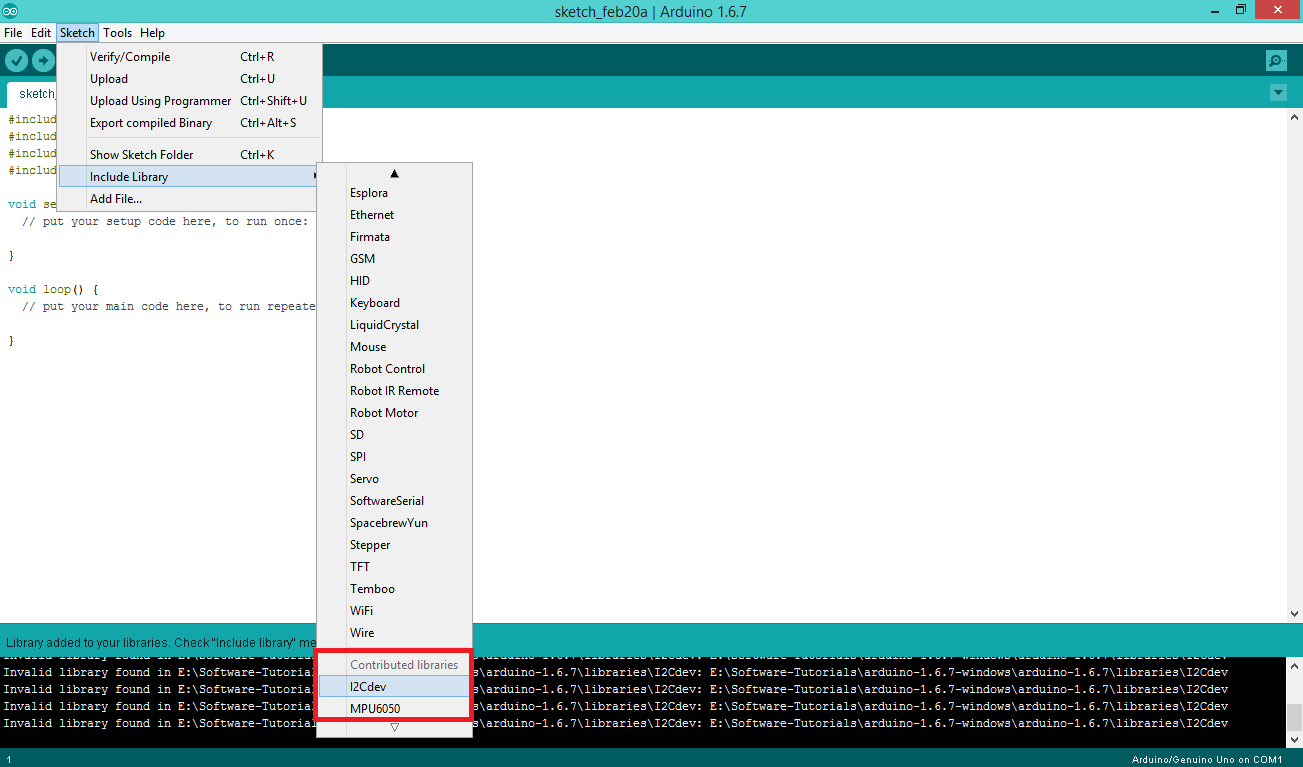
Ahora, haga clic en el IDE de arduino y vea si estas nuevas bibliotecas están visibles (Fig (9).
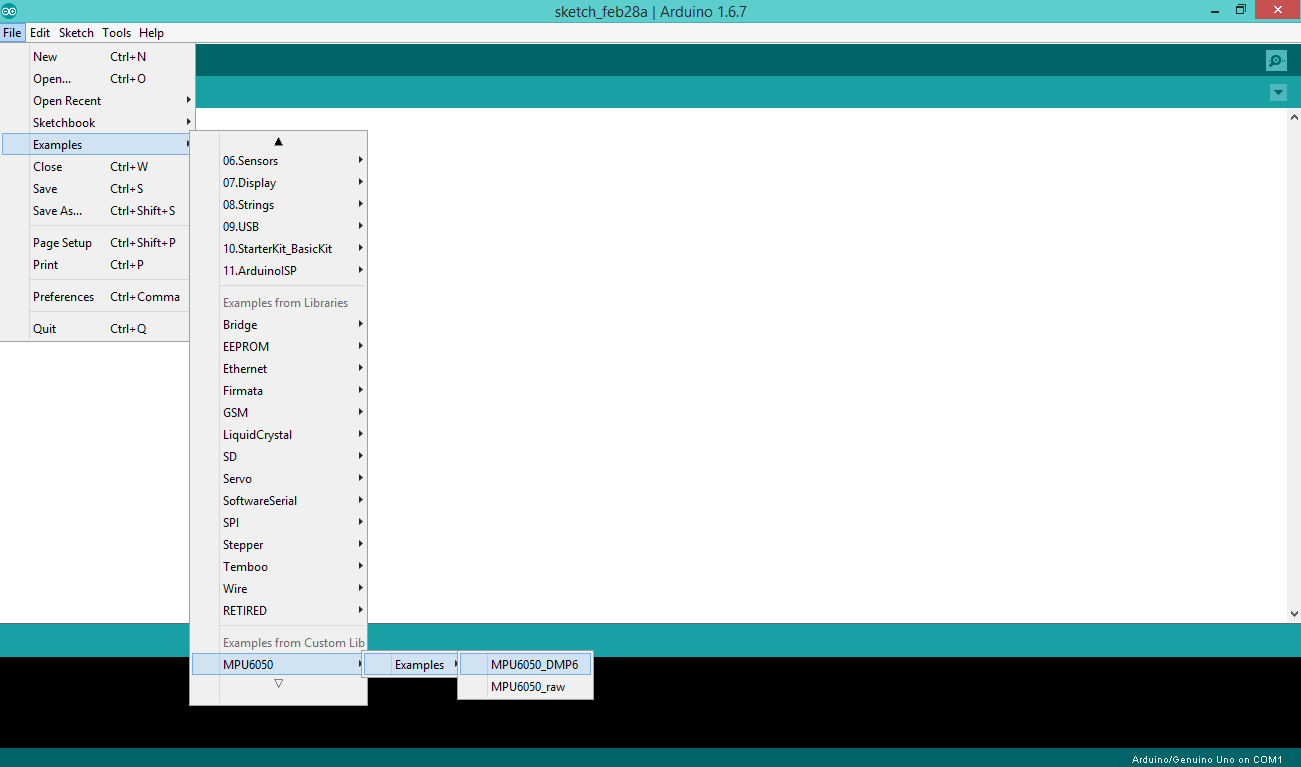
Antes de incluir estas bibliotecas en su boceto, debe buscar el código para MPU6050. Consulte la Fig (10)
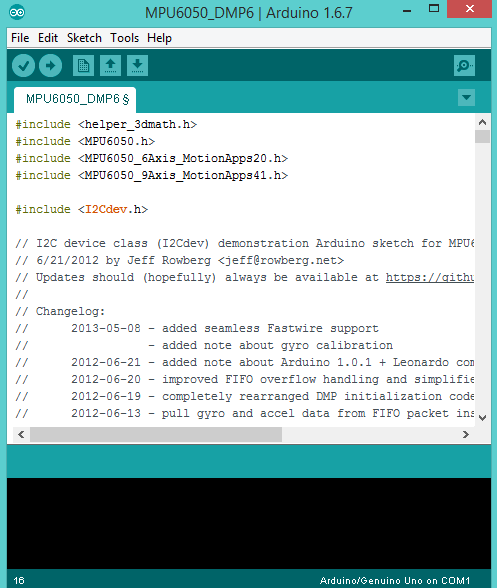
(Archivo> Ejemplos> MPU6050> Ejemplos> MPU6050_DMP6). Haga clic en este archivo "MPU6050_DMP6".
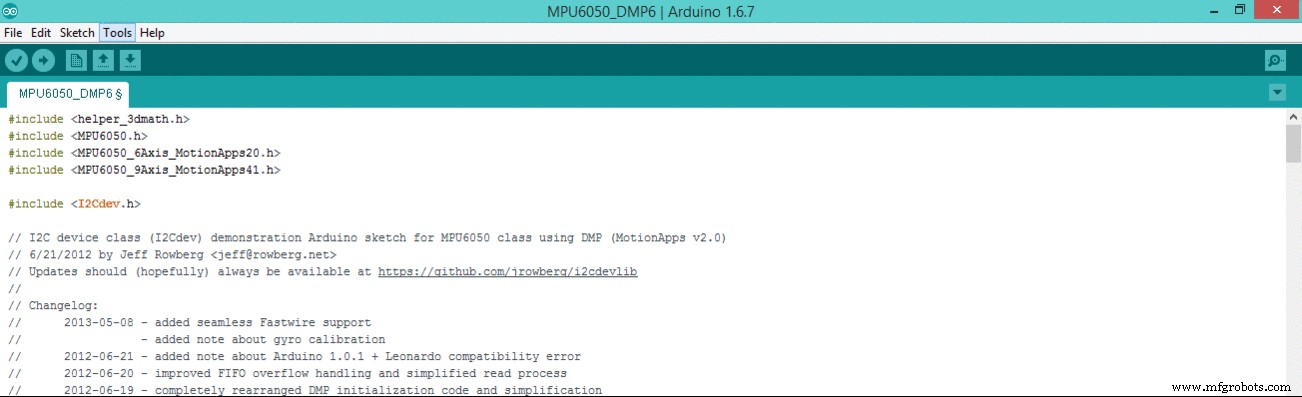
A continuación, incluya las bibliotecas "I2Cdev" y "MPU6050" en este esquema [Fig (11)].
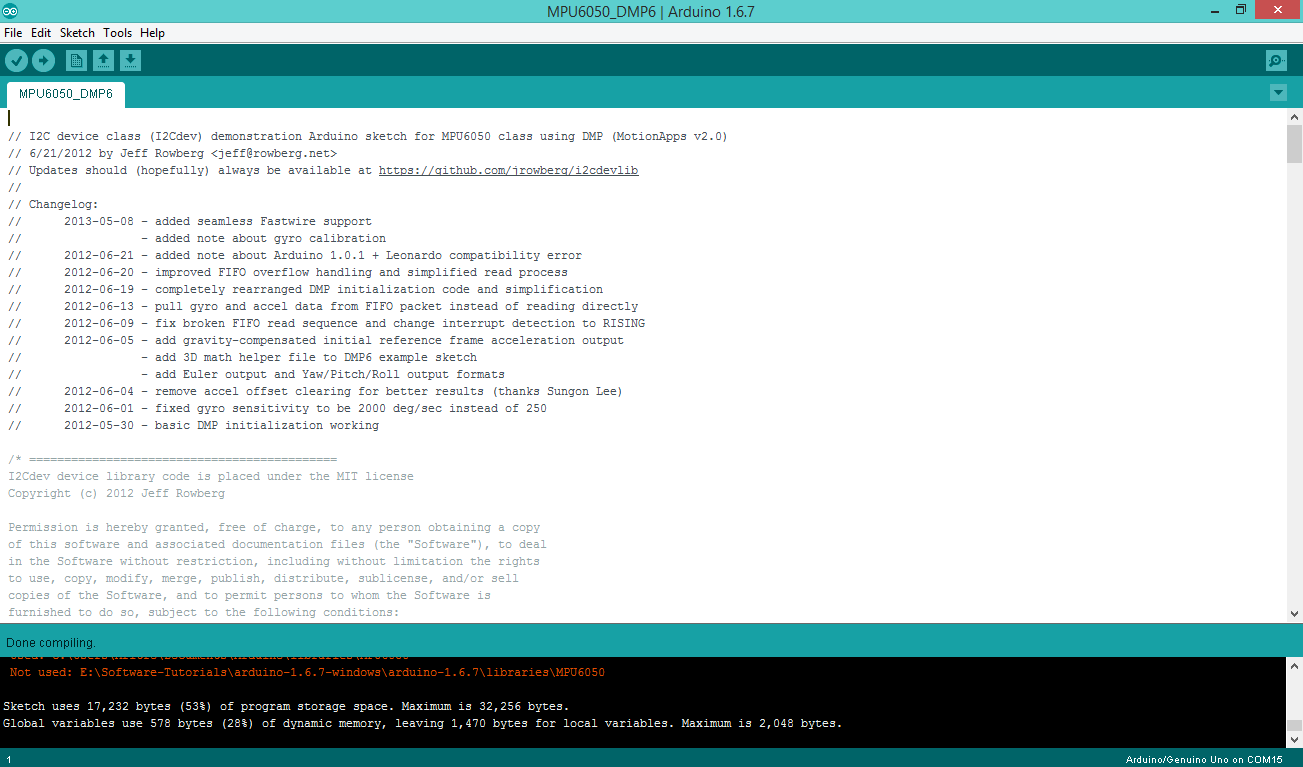
Después de haber seguido todos los pasos, COMPILAR el croquis [Fig (12)].
Ahora, el paso final sigue siendo ...
Si observa que debajo de la esquina derecha de esta ventana, el mensaje dice "Arduino / Genuino Uno en COM1", asegúrese de que sea correcto. De lo contrario, consulte la [Fig (14)]. No haga clic en Serial Monitor ahora. Solo después de cargar el boceto [como en la Fig (13)], vaya a los siguientes pasos.
Debe asegurarse de que se asigne el puerto correcto cada vez que conecte su Arduino.
¿Confundido con esta nueva ventana? Bueno, esa es tu pantalla de salida. Técnicamente hablando, lo llamamos Monitor en serie. Ahí es donde leemos nuestros valores de diferentes sensores.
PASO:Herramientas> Monitor serial o, Tecla de acceso directo (Ctrl + Shift + M)
Si tiene problemas para cargar el boceto, aunque haya seleccionado los puertos correctos. Haga clic en este enlace (para usuarios de Windows). Para usuarios de Mac, consulte la guía. Los usuarios de Linux deben consultar esta página web para obtener orientación.
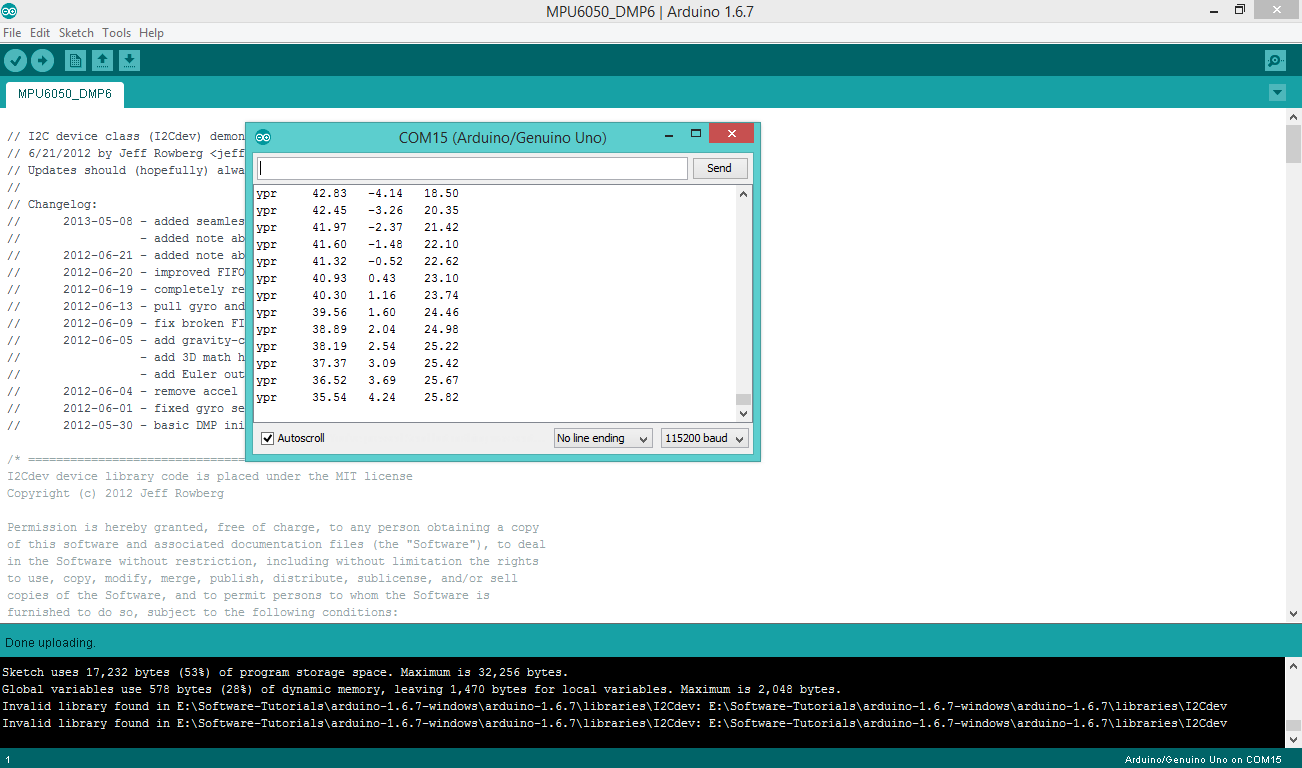
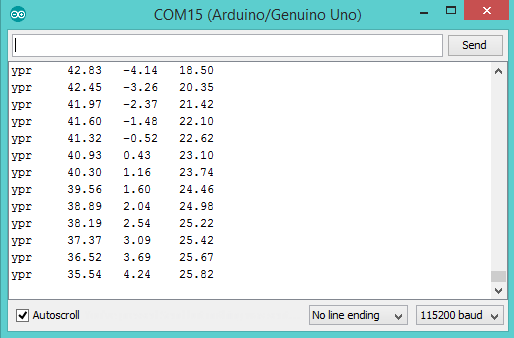
Después de cargar el código, abra el monitor en serie y cambie la "velocidad en baudios" a 115200. Si selecciona cualquier otra velocidad en baudios, verá comentarios basura porque no estarán sincronizados. NOTA: Los procesadores host de 8 MHz o más lentos, como Teensy @ 3.3v o Ardunio Pro Mini que se ejecutan a 3.3v, no pueden manejar esta velocidad en baudios de manera confiable debido a que la sincronización en baudios está demasiado desalineada con los tics del procesador. Debe usar 38400 o más lento en estos casos, o usar algún tipo de solución de cristal separada externa para el temporizador UART.
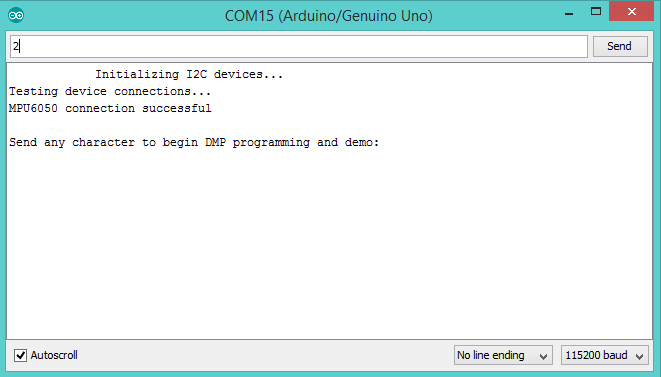
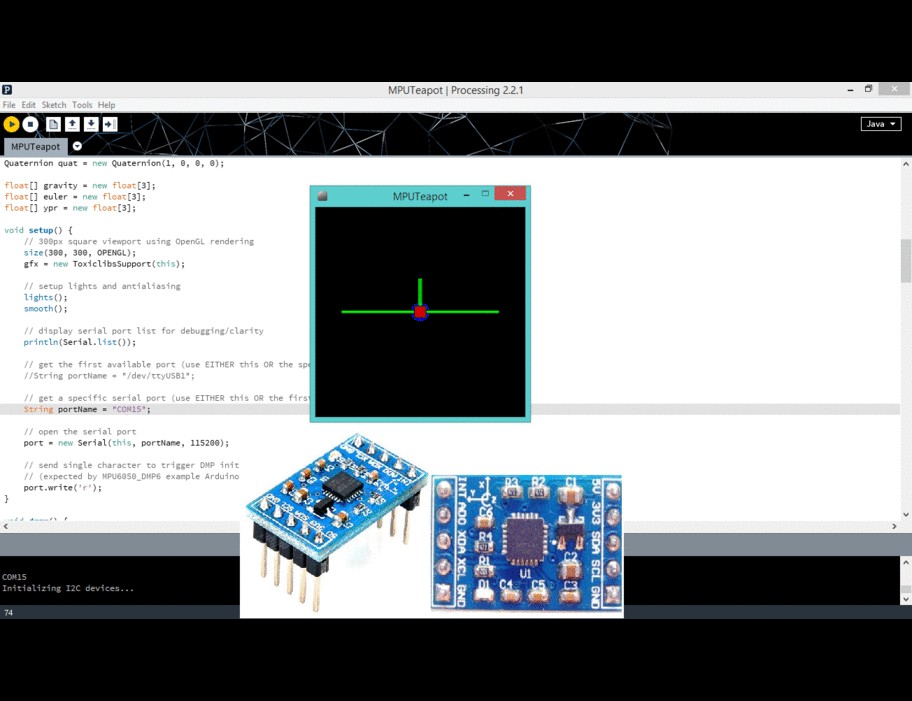
Si no ve esta declaración "Inicializando dispositivos I2C ..." en su pantalla, presione el botón RESET. Debería funcionar ahora. [Figura (15)]
KNOWLEDGECORNER>> Verá una línea que dice "Envíe cualquier carácter para comenzar la programación y demostración de DMP:" ¿Qué es DMP?
Respuesta: DMP son las siglas de Digital Motion Processing . El MPU 6050 de Invense tiene un procesador de movimiento incorporado. Procesa los valores del acelerómetro y el giroscopio para darnos valores 3D precisos; es decir, guiñada, cabeceo y balanceo. [Figura (16)]
KNOWLEDGECORNER>> Vimos que la comunicación entre el sensor y arduino se basa en el protocolo de bus I2C. Asimismo, también incluimos una biblioteca I2C en este proyecto. ¿Sabes qué significa I2C?
Respuesta: El bus I2C consta físicamente de 2 cables activos y una conexión a tierra. Los cables activos, llamados SDA y SCL , son bidireccionales. SDA es la línea Serial DAta y SCL es la línea Serial CLock. Cada dispositivo conectado al bus tiene su propia dirección única, sin importar si es un MCU, controlador LCD, memoria o ASIC. Cada uno de estos chips puede actuar como receptor y / o transmisor, dependiendo de la funcionalidad. Obviamente, un controlador LCD es solo un receptor, mientras que una memoria o un chip de E / S pueden ser tanto transmisor como receptor. El bus I2C es un bus multimaestro. Esto significa que se puede conectar más de un IC capaz de iniciar una transferencia de datos. La especificación del protocolo I2C establece que el IC que inicia una transferencia de datos en el bus se considera el Bus Master. En consecuencia, en ese momento, todos los demás circuitos integrados se consideran esclavos de bus. Como los maestros de bus son generalmente microcontroladores, aquí, por ejemplo, el maestro de bus es ArduinoUno. Asimismo, el sensor MPU es el esclavo de bus.
Visualice el movimiento en 3D en mi próximo tutorial. Haga clic aquí
Código
- Código Arduino para sensor MPU
Código Arduino para sensor MPU Arduino
* /// I2Cdev y MPU6050 deben instalarse como bibliotecas, o de lo contrario los archivos .cpp / .h // para ambas clases deben estar en la ruta de inclusión de su proyecto # include "I2Cdev.h" #include "MPU6050_6Axis_MotionApps20 .h "// # incluir" MPU6050.h "// no es necesario si se utilizan MotionApps incluir archivo // Se requiere la biblioteca Arduino Wire si I2Cdev I2CDEV_ARDUINO_WIRE implementación // se usa en I2Cdev.h # si I2CDEV_IMPLEMENTATION ==I2CDEV_ARDUINO_WIRE #include" Wire .h "# endif // la dirección I2C predeterminada de la clase es 0x68 // direcciones I2C específicas se pueden pasar como parámetro aquí // AD0 low =0x68 (predeterminado para la placa de evaluación SparkFun y la placa de evaluación InvenSense) // AD0 high =0x69MPU6050 mpu; / / MPU6050 mpu (0x69); // <- usar para AD0 alto / * =======================================================================NOTA:Además de la conexión 3.3v, GND, SDA y SCL, este boceto depende de que el pin INT del MPU-6050 esté conectado al pin de interrupción externa # 0 del Arduino. En Arduino Uno y Mega 2560, este es el pin 2 de E / S digital. * =========================================================================* // * =======================================================================NOTA:Arduino v1.0.1 con la placa Leonardo genera un error de compilación cuando se usa Serial.write (buf, len). La salida de Teapot utiliza este método. La solución requiere una modificación en el archivo Arduino USBAPI.h, que afortunadamente es simple, pero molesto. Esto se solucionará en la próxima versión de IDE. Para obtener más información, consulte estos enlaces:http://arduino.cc/forum/index.php/topic,109987.0.html http://code.google.com/p/arduino/issues/detail?id=958 * =======================================================================* /// descomente "OUTPUT_READABLE_QUATERNION" si desea ver los // componentes reales del cuaternión en un [w, x, y, z] formato (no es el mejor para analizar // en un host remoto como Processing o algo así) // # define OUTPUT_READABLE_QUATERNION // descomenta "OUTPUT_READABLE_EULER" si quieres ver los ángulos de Euler // (en grados) calculados a partir de los cuaterniones que vienen desde el FIFO.// Tenga en cuenta que los ángulos de Euler sufren de bloqueo de cardán (para obtener más información, consulte // http://en.wikipedia.org/wiki/Gimbal_lock)//#define OUTPUT_READABLE_EULER // descomente "OUTPUT_READABLE_YAWPITCHROLL" si lo desea para ver los ángulos de guiñada /// cabeceo / balanceo (en grados) calculados a partir de los cuaterniones procedentes // del FIFO. Tenga en cuenta que esto también requiere cálculos de vector de gravedad .// También tenga en cuenta que los ángulos de guiñada / cabeceo / balanceo sufren de bloqueo del cardán (para // más información, consulte:http://en.wikipedia.org/wiki/Gimbal_lock)#define OUTPUT_READABLE_YAWPITCHROLL / / descomenta "OUTPUT_READABLE_REALACCEL" si quieres ver componentes de aceleración // sin gravedad. Este marco de referencia de aceleración // no está compensado por la orientación, por lo que + X es siempre + X según el // sensor, solo que sin los efectos de la gravedad. Si desea que la aceleración // compense la orientación, use OUTPUT_READABLE_WORLDACCEL en su lugar .//#define OUTPUT_READABLE_REALACCEL // descomente "OUTPUT_READABLE_WORLDACCEL" si desea ver la aceleración // componentes con gravedad eliminada y ajustada para el marco mundial de // referencia (la orientación es en relación con la orientación inicial, ya que en este caso no hay ningún magnetómetro //). Podría ser bastante útil en algunos casos.//#define OUTPUT_READABLE_WORLDACCEL // descomente "OUTPUT_TEAPOT" si desea una salida que coincida con el // formato utilizado para la demostración de la tetera de InvenSense // # defina OUTPUT_TEAPOT # define LED_PIN 13 // (Arduino es 13 , Teensy tiene 11 años, Teensy ++ tiene 6) bool blinkState =false; // Control / estado de MPU varsbool dmpReady =false; // establecer verdadero si DMP init fue exitosouint8_t mpuIntStatus; // contiene el byte de estado de interrupción real de MPUuint8_t devStatus; // devuelve el estado después de cada operación del dispositivo (0 =éxito,! 0 =error) uint16_t packetSize; // tamaño esperado del paquete DMP (el valor predeterminado es 42 bytes) uint16_t FIFoCount; // recuento de todos los bytes actualmente en FIFOuint8_t fifoBuffer [64]; // Búfer de almacenamiento FIFO // orientación / movimiento varsQuaternion q; // [w, x, y, z] contenedor de cuaternionesVectorInt16 aa; // [x, y, z] medidas del sensor de aceleración VectorInt16 aaReal; // [x, y, z] mediciones del sensor de aceleración sin gravedad VectorInt16 aaWorld; // [x, y, z] mediciones del sensor de aceleración de marco mundial VectorFloat gravity; // [x, y, z] vector de gravedad flotante euler [3]; // [psi, theta, phi] ángulo de Euler containerfloat ypr [3]; // [guiñada, cabeceo, balanceo] yaw / pitch / roll contenedor y vector de gravedad // estructura del paquete para la tetera InvenSense demouint8_t teapotPacket [14] ={'$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\ r', '\ n'}; // ================================================================// ===RUTINA DE DETECCIÓN DE INTERRUPCIONES ===// ==============================================================volatile bool mpuInterrupt =false; // indica si el pin de interrupción de MPU ha subido alto. dmpDataReady () {mpuInterrupt =true;} // ================================================================// ===CONFIGURACIÓN INICIAL ===// ==============================================================void setup () {// unirse al bus I2C (la biblioteca I2Cdev no hace esto automáticamente) #if I2CDEV_IMPLEMENTATION ==I2CDEV_ARDUINO_WIRE Wire.begin (); TWBR =24; // Reloj I2C de 400 kHz (200 kHz si la CPU es de 8 MHz) #elif I2CDEV_IMPLEMENTATION ==I2CDEV_BUILTIN_FASTWIRE Fastwire ::setup (400, true); #endif // inicializar la comunicación en serie // (se eligió 115200 porque es necesario para la salida de la demostración de Teapot, pero // realmente depende de usted según su proyecto) Serial.begin (115200); mientras (! Serial); // espere la enumeración de Leonardo, otros continúan inmediatamente // NOTA:Los procesadores host de 8MHz o más lentos, como Teensy @ 3.3v o Ardunio // Pro Mini que se ejecuta a 3.3v, no pueden manejar esta velocidad en baudios de manera confiable debido // a la sincronización en baudios estar demasiado desalineado con las garrapatas del procesador. Debe usar // 38400 o más lento en estos casos, o usar algún tipo de solución de cristal // separada externa para el temporizador UART. // inicializar el dispositivo Serial.println (F ("Inicializando dispositivos I2C ...")); mpu.initialize (); // verifica la conexión Serial.println (F ("Probando las conexiones del dispositivo ...")); Serial.println (mpu.testConnection ()? F ("Conexión de MPU6050 exitosa"):F ("Error de conexión de MPU6050")); // espera a que esté listo Serial.println (F ("\ nEnviar cualquier carácter para comenzar la programación y demostración DMP:")); while (Serial.available () &&Serial.read ()); // búfer vacío while (! Serial.available ()); // esperar datos while (Serial.available () &&Serial.read ()); // vaciar el búfer de nuevo // cargar y configurar el DMP Serial.println (F ("Inicializando DMP ...")); devStatus =mpu.dmpInitialize (); // proporcione aquí sus propias compensaciones giroscópicas, escaladas para sensibilidad mínima mpu.setXGyroOffset (220); mpu.setYGyroOffset (76); mpu.setZGyroOffset (-85); mpu.setZAccelOffset (1788); // 1688 predeterminado de fábrica para mi chip de prueba // asegúrese de que funcionó (devuelve 0 si es así) if (devStatus ==0) {// enciende el DMP, ahora que está listo Serial.println (F ("Habilitando DMP. .. ")); mpu.setDMPEnabled (verdadero); // habilita la detección de interrupciones de Arduino Serial.println (F ("Habilitando la detección de interrupciones (interrupción externa de Arduino 0) ...")); attachInterrupt (0, dmpDataReady, RISING); mpuIntStatus =mpu.getIntStatus (); // establece nuestro indicador DMP Ready para que la función main loop () sepa que está bien usarlo Serial.println (F ("DMP listo! Esperando la primera interrupción ...")); dmpReady =verdadero; // obtener el tamaño de paquete DMP esperado para una comparación posterior packetSize =mpu.dmpGetFIFOPacketSize (); } else {// ¡ERROR! // 1 =falló la carga de memoria inicial // 2 =fallaron las actualizaciones de la configuración DMP // (si se va a romper, normalmente el código será 1) Serial.print (F ("DMP Initialization failed (code")); Serial. print (devStatus); Serial.println (F (")")); } // configurar LED para salida pinMode (LED_PIN, OUTPUT);} // ================================================================// ===BUCLE PRINCIPAL DEL PROGRAMA ===// ==============================================================void loop () {// si la programación falló, no intente hacer nada if (! dmpReady) return; // espere la interrupción de MPU o paquetes adicionales disponibles mientras (! mpuInterrupt &&FIFoCount 1 paquete disponible // (esto nos permite leer más inmediatamente sin esperar una interrupción) FIFOCount - =packetSize; #ifdef OUTPUT_READABLE_QUATERNION // muestra los valores del cuaternión en forma de matriz sencilla:w x y z mpu.dmpGetQuaternion (&q, fifoBuffer); Serial.print ("quat \ t"); Serial.print (q.w); Serial.print ("\ t"); Serial.print (q.x); Serial.print ("\ t"); Serial.print (q.y); Serial.print ("\ t"); Serial.println (q.z); #endif #ifdef OUTPUT_READABLE_EULER // muestra los ángulos de Euler en grados mpu.dmpGetQuaternion (&q, fifoBuffer); mpu.dmpGetEuler (euler, &q); Serial.print ("euler \ t"); Serial.print (euler [0] * 180 / M_PI); Serial.print ("\ t"); Serial.print (euler [1] * 180 / M_PI); Serial.print ("\ t"); Serial.println (euler [2] * 180 / M_PI); #endif #ifdef OUTPUT_READABLE_YAWPITCHROLL // muestra los ángulos de Euler en grados mpu.dmpGetQuaternion (&q, fifoBuffer); mpu.dmpGetGravity (&gravedad, &q); mpu.dmpGetYawPitchRoll (ypr, &q y gravedad); Serial.print ("ypr \ t"); Serial.print (ypr [0] * 180 / M_PI); Serial.print ("\ t"); Serial.print (ypr [1] * 180 / M_PI); Serial.print ("\ t"); Serial.println (ypr [2] * 180 / M_PI); #endif #ifdef OUTPUT_READABLE_REALACCEL // muestra la aceleración real, ajustada para eliminar la gravedad mpu.dmpGetQuaternion (&q, fifoBuffer); mpu.dmpGetAccel (&aa, FIFoBuffer); mpu.dmpGetGravity (&gravedad, &q); mpu.dmpGetLinearAccel (&aaReal, &aa, &gravity); Serial.print ("areal \ t"); Serial.print (aaReal.x); Serial.print ("\ t"); Serial.print (aaReal.y); Serial.print ("\ t"); Serial.println (aaReal.z); #endif #ifdef OUTPUT_READABLE_WORLDACCEL // muestra la aceleración inicial del marco mundial, ajustada para eliminar la gravedad // y girada según la orientación conocida del cuaternión mpu.dmpGetQuaternion (&q, FIFoBuffer); mpu.dmpGetAccel (&aa, FIFoBuffer); mpu.dmpGetGravity (&gravedad, &q); mpu.dmpGetLinearAccel (&aaReal, &aa, &gravity); mpu.dmpGetLinearAccelInWorld (&aaWorld, &aaReal, &q); Serial.print ("mundo \ t"); Serial.print (aaWorld.x); Serial.print ("\ t"); Serial.print (aaWorld.y); Serial.print ("\ t"); Serial.println (aaWorld.z); #endif #ifdef OUTPUT_TEAPOT // muestra los valores de cuaternión en el formato de demostración de InvenSense Teapot:teapotPacket [2] =fifoBuffer [0]; teapotPacket [3] =FifoBuffer [1]; teapotPacket [4] =FifoBuffer [4]; teapotPacket [5] =FifoBuffer [5]; teapotPacket [6] =FifoBuffer [8]; teapotPacket [7] =FifoBuffer [9]; teapotPacket [8] =FifoBuffer [12]; teapotPacket [9] =FifoBuffer [13]; Serial.write (teapotPacket, 14); teapotPacket [11] ++; // packetCount, se repite en 0xFF a propósito #endif // parpadea el LED para indicar actividad blinkState =! blinkState; digitalWrite (LED_PIN, blinkState); }} Esquemas
Proceso de manufactura
- Sensor de seguimiento de línea con RPi
- API de sensor ambiental con un RPi
- Sensor de movimiento con Raspberry Pi
- Raspberry Pi GPIO con sensor de movimiento PIR:el mejor tutorial
- Interfaz del sensor de movimiento PIR HC-SR501 con Raspberry Pi
- Introducción a TJBot
- Introducción a RAK 831 Lora Gateway y RPi3
- Introducción a RAK831 LoRa Gateway y RPi3
- Introducción a la IA en seguros:una guía introductoria
- Tutorial de Arduino 01:Primeros pasos
- Primeros pasos con Eagle Group:lo que necesita saber