


Motor paso a paso impreso en 3D
Componentes y suministros
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Acerca de este proyecto
https://www.youtube.com/embed/v2FNUNALSTwRecientemente me encontré con este instructable de un motor de CC impreso en 3D y pensé que podría dar un paso más; Literalmente. Diseñé este motor paso a paso con ocho electroimanes, seis imanes de neodimio, con un rotor y una carcasa de estator impresos en 3D. Este es específicamente un motor paso a paso de imán permanente capaz de pasos completos de 15 grados y semitonos de 7.5 grados. Hay muchos tipos diferentes de motores paso a paso, pero la mayoría funcionan de manera muy similar al que he diseñado aquí. Esta es una pantalla educativa para mostrar a otros cómo funcionan los motores paso a paso. Diseñé esto para que funcione con una fuente de alimentación de 5-12 VCC para que funcione con la mayoría de las fuentes de alimentación USB.
También estoy haciendo un sorteo en mi canal de Youtube. Regalaré un arduino, los transistores utilizados en este proyecto y algunos interruptores. Más detalles en el último paso.
Paso 1:Qué necesitará
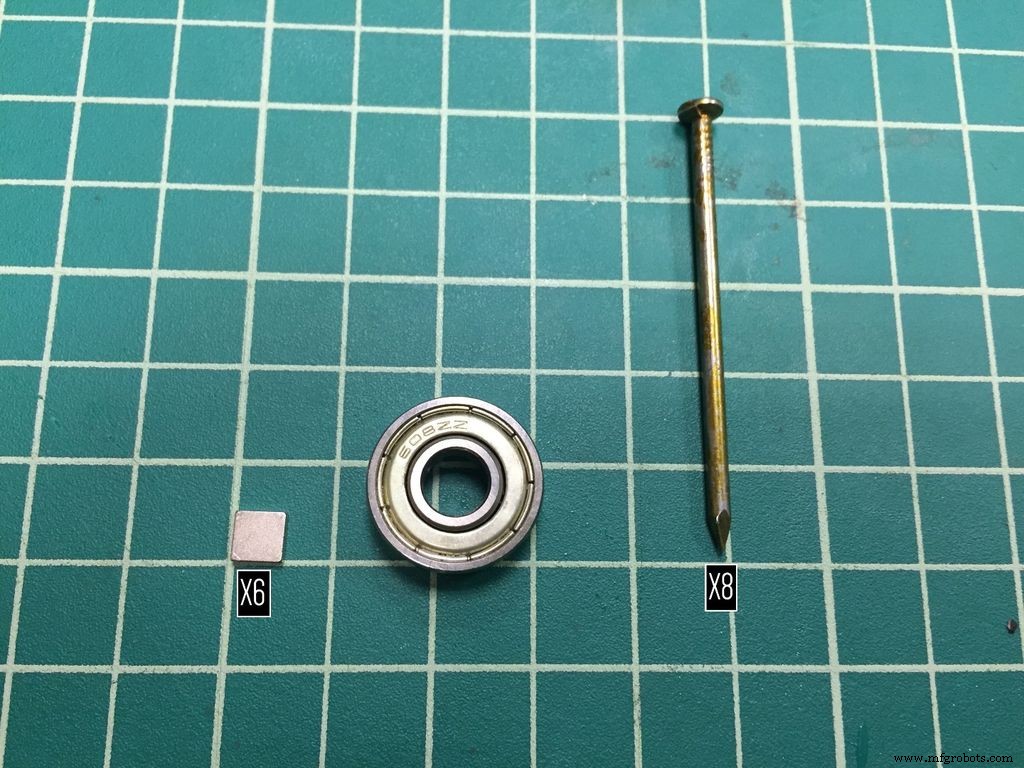


- Seis imanes de neodimio de 1/4 "
- Rodamiento 608ZZ
- Ocho clavos de 8d 2-3 / 8 ":no es crítico qué clavos use siempre que se ajusten.
- Cable magnético:utilicé un cable magnético de 0,315 mm, pero esto no es crítico.
- Arduino Uno
- Cuatro transistores:utilicé transistores PNP que tenía por ahí, pero puede usar los transistores que desee o MOSFETS siempre que se asegure de que puedan manejar la corriente que consumirá su motor. Lea la hoja de datos detenidamente para obtener recomendaciones específicas. En 5v, el motor de mina consume aproximadamente 1 amperio y en 12v requiere aproximadamente 3 amperios.
- Rotor y estator impresos en 3D
- Pegamento
- Cinta aislante
- Una brújula
Paso 2:Imprima el rotor dodecágono y el estator octágono
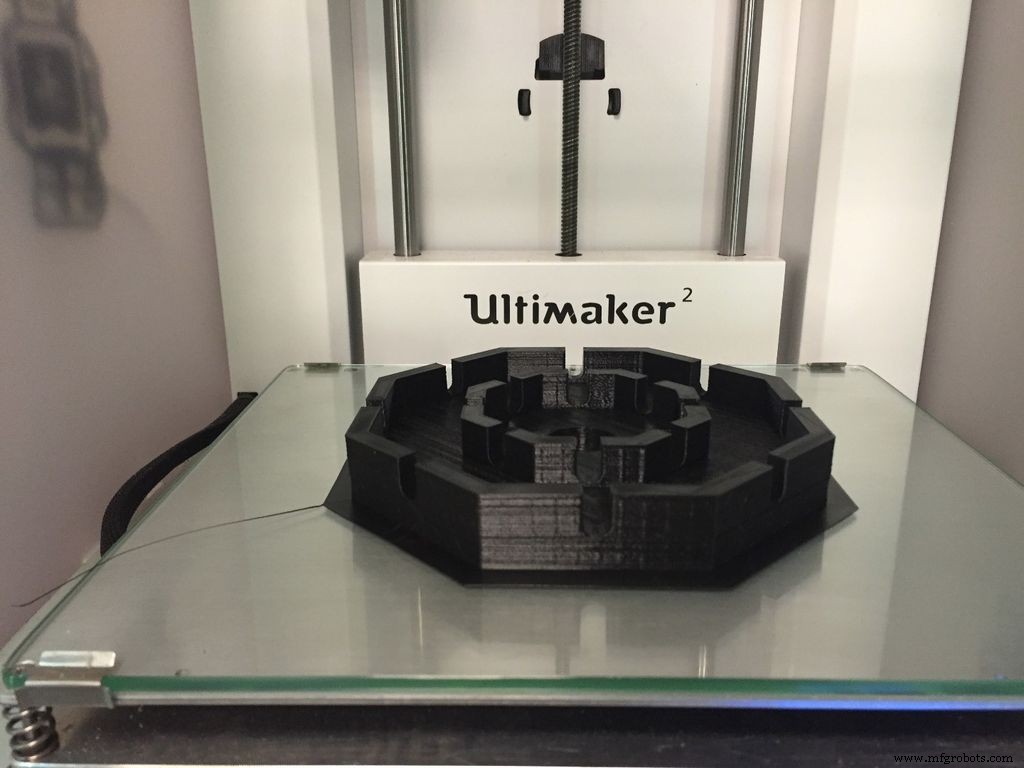
¡Imprime con 3D Hubs!
Paso 3:



Use una brújula para determinar los polos de sus imanes y pegue los imanes con los polos norte hacia afuera. Si sus imanes son lo suficientemente fuertes, la brújula de algunos teléfonos inteligentes le mostrará la polaridad de los imanes.
Paso 4:
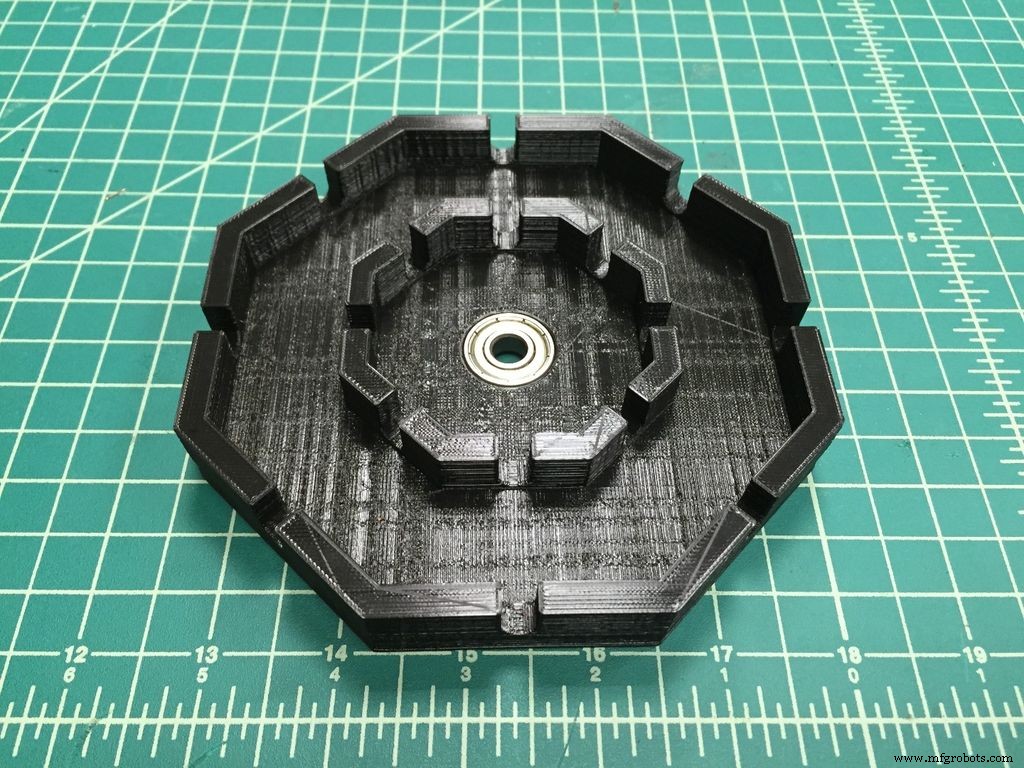

Presione el rodamiento en el estator y luego presione el rotor en el rodamiento. Me sorprendió gratamente lo bien que encajaba la prensa del rodamiento en el estator. Cuando se imprime en 3D, los agujeros tienden a encogerse hacia adentro y terminan siendo más pequeños de lo esperado, por lo que generalmente los sobredimensiono un poco.
Paso 5:
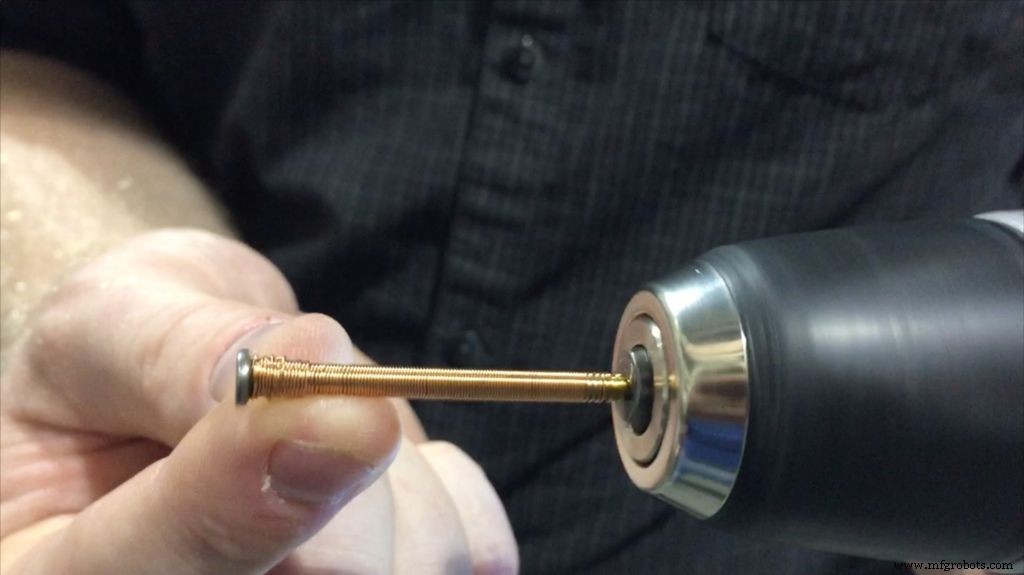

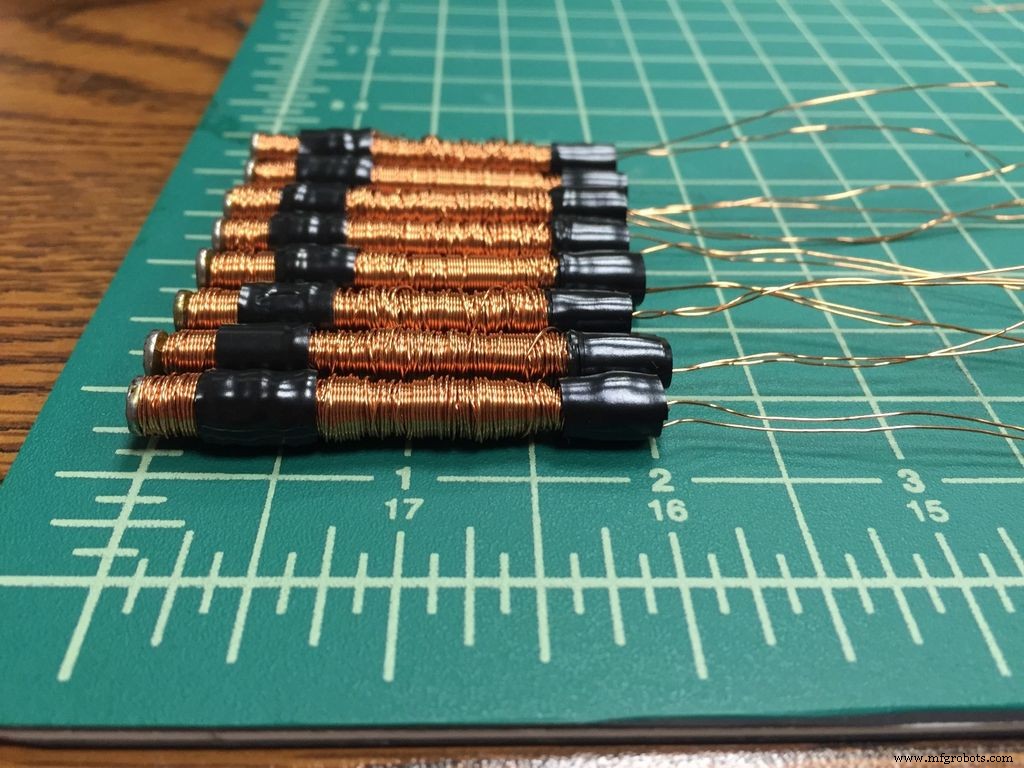
Corte 9 pedazos de alambre a 25 pies y enróllelos con un taladro. Use una brújula y una batería para determinar la configuración requerida para darle el polo sur en la cabeza del clavo. Utilice un marcador o un tubo termorretráctil para marcar el cable negativo de sus electroimanes. Envuelva las secciones de los electroimanes con cinta aislante donde entrarán en contacto con la carcasa del estator. Esto tiene dos propósitos. Asegura firmemente los electroimanes en su lugar y también aísla la carcasa de cualquier calor que pueda producir la bobina. Los pares de bobinas consumen aproximadamente 1 amperio con la fuente de alimentación de 5 V que estoy usando. Los transistores que elegí pueden funcionar con una fuente de alimentación de 12 V de la que las bobinas extraen aproximadamente 3 amperios. El problema con el suministro de voltaje más alto es que si lo dejo funcionando un poco, las bobinas comienzan a calentarse.
Advertencia:
Diseñé esto para que funcione con una fuente de alimentación de 5-12 V CC. Si decide salirse de los caminos trillados, use la Ley de Ohm para determinar qué tamaño de bobinas desea. V =I * R
Recuerde, cuantos menos devanados haya en su bobina, menor será la resistencia. Si no tiene cuidado, sus bobinas extraerán más corriente de la que su fuente de alimentación o transistores pueden soportar y sucederán cosas malas.
Paso 6:
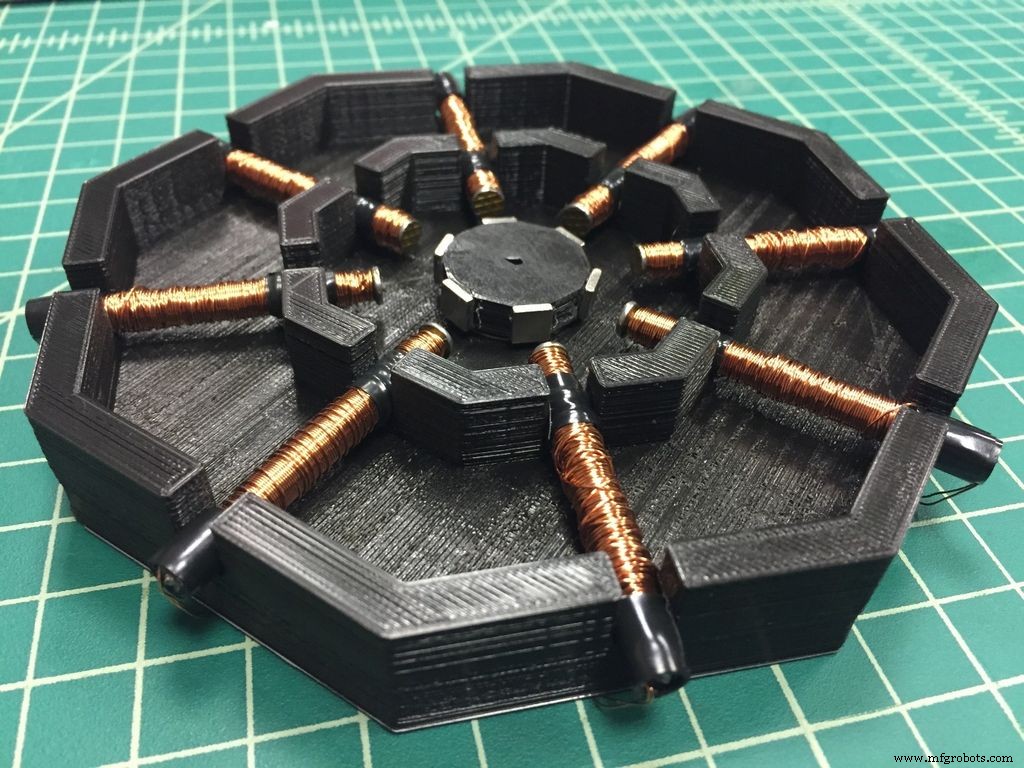
Empuje los electroimanes en el estator hasta que estén a aproximadamente 1/4 "de los imanes de neodimio. Puede deslizar los electroimanes hacia adentro y hacia afuera como desee, pero no los quería demasiado cerca porque los clavos se magnetizarán mucho más rápido. Esa es la desventaja de usar los clavos. El motor seguirá funcionando una vez que se magneticen, pero será menos eficiente. Las varillas de soldadura son una buena alternativa a los clavos si tiene algunos por ahí.
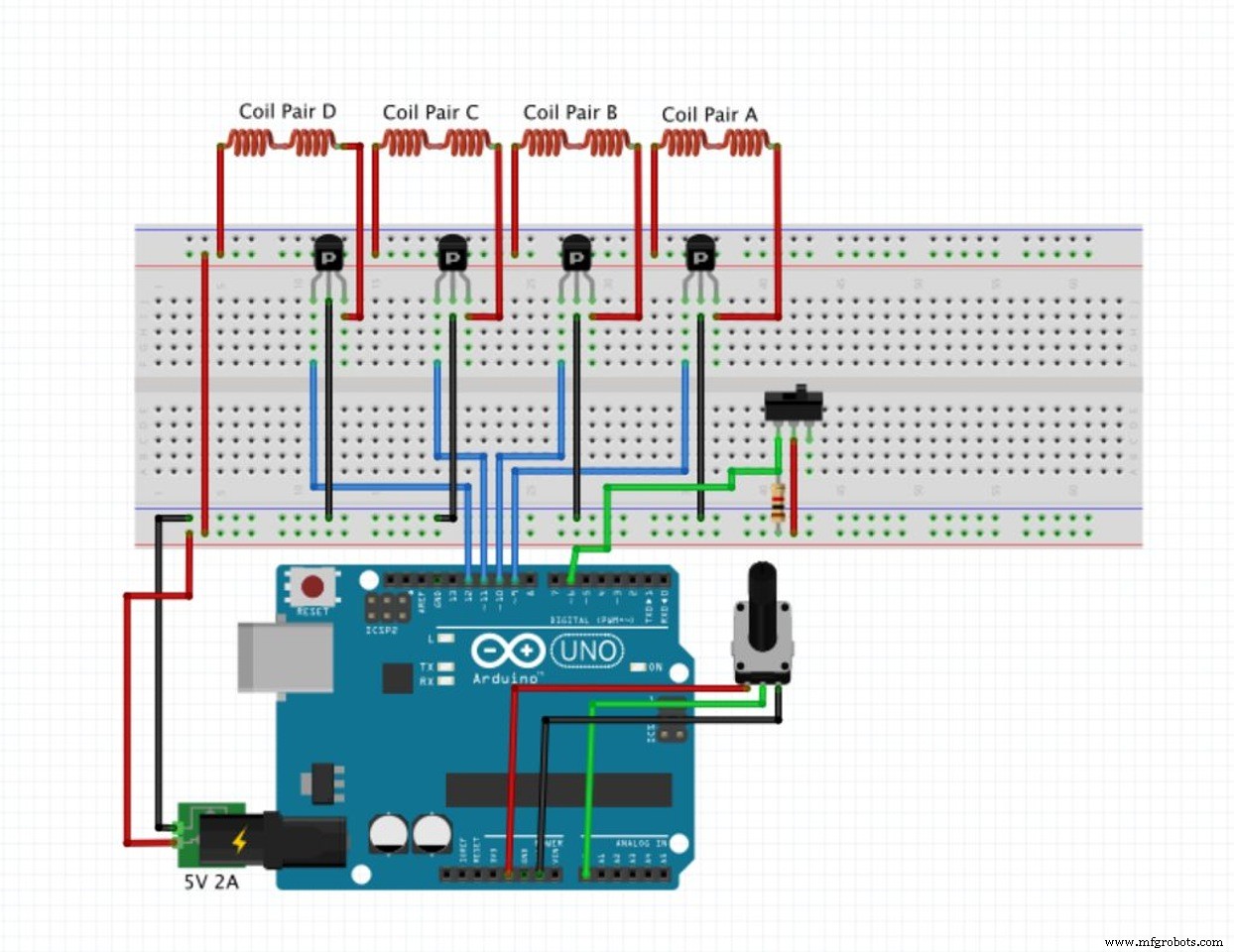
Paso 7:suelde todo junto
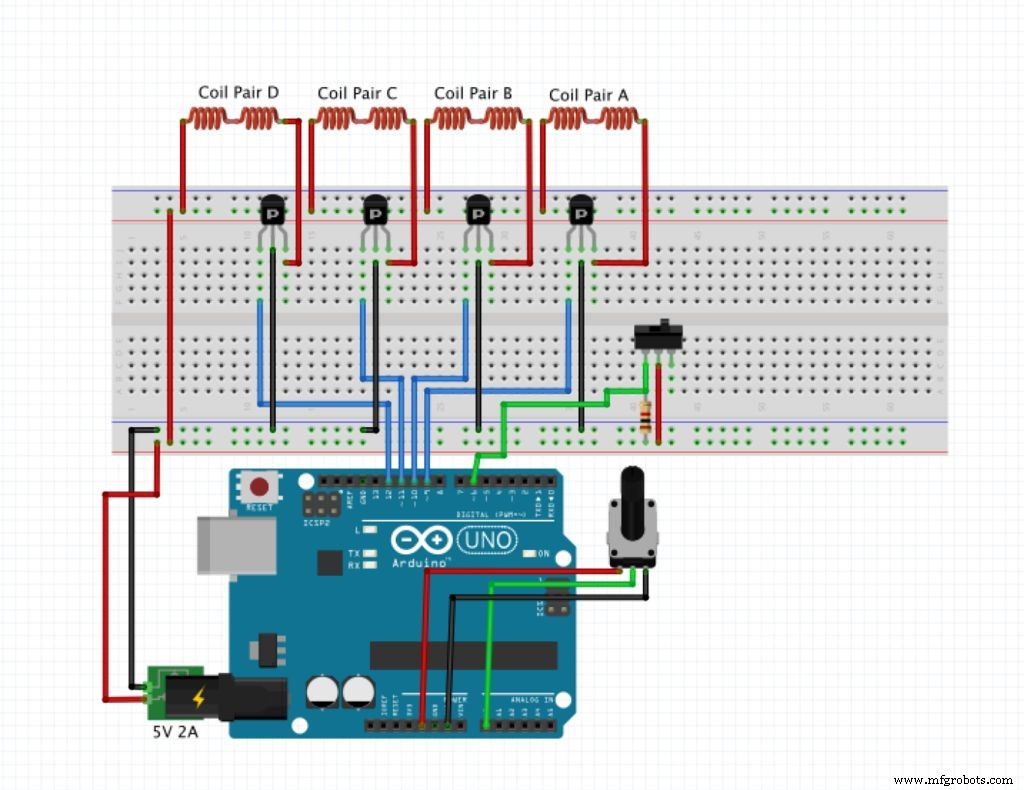
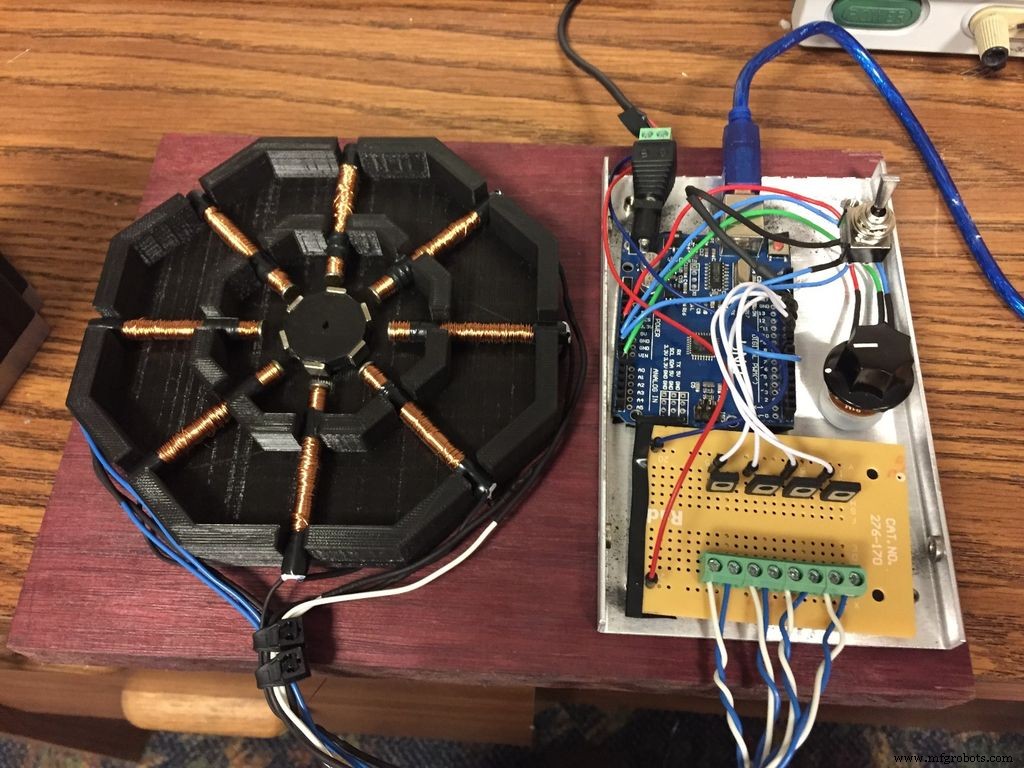
Conecte sus pares de bobinas en serie y conéctelos de modo que todos los polos sur de los electroimanes miren hacia adentro. La resistencia que utilicé en el esquema es una resistencia de 1k. El propósito de esto es evitar que el pin digital "flote" alto cuando está en la posición de apagado. Nuevamente, asegúrese de usar un transistor capaz de soportar la corriente que sus bobinas demandarán.
¡Cargue el código fuente en su arduino y estará listo para comenzar!
Paso 8:¡Pague hacia adelante!

Regalaré un arduino, los transistores utilizados en este proyecto, junto con algunos interruptores y cables de puente.
Reglas para el sorteo:
Suscríbete a mi Canal de YouTube , como este video y deja un comentario en el video diciendo lo que te gustaría que construyera a continuación. ¡El 1 de septiembre seleccionaré al azar el comentario de un suscriptor y lo enviaré gratis! ¡Gracias a todos por ser una comunidad tan acogedora!
Código
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.ino Texto sin formato
/ * 01010000011100100110111101110100011011111100100000010001113D Motor paso a paso impreso Creado el 15 de agosto de 2015 Modificado el 15 de agosto de 2015 por Anthony Garofalo (Proto G) Visite mi canal de YouTube aquí:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwVisbles /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ | _____] | _____ / | | | | | | ____ | | \ _ | _____ | | | _____ | | _____ | 01010000011100100110111101110100011011110010000001000111 * / int Delay; int reverseSwitch; void setup () {// inicializa el pin digital 13 como salida. pinMode (9, SALIDA); pinMode (10, SALIDA); pinMode (11, SALIDA); pinMode (12, SALIDA); pinMode (13, SALIDA); // pin led para pinMode visual (6, INPUT); // el interruptor de palanca está conectado al pin digital 6 para invertir la dirección} void loop () {reverseSwitch =digitalRead (6); if (reverseSwitch ==HIGH) {// si el interruptor de marcha atrás es alto, gire el rotor en sentido antihorario. Delay =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (12, ALTA); escritura digital (13, ALTA); retraso (retraso); digitalWrite (12, BAJO); digitalWrite (13, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (11, ALTA); retraso (retraso); digitalWrite (11, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (10, ALTA); escritura digital (13, ALTA); retraso (retraso); digitalWrite (10, BAJO); digitalWrite (13, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (9, ALTA); retraso (retraso); digitalWrite (9, BAJO); retraso (5); } else {// si el interruptor inverso no está alto, gire el rotor en el sentido de las agujas del reloj. Delay =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (9, ALTA); escritura digital (13, ALTA); retraso (retraso); digitalWrite (9, BAJO); digitalWrite (13, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (10, ALTA); retraso (retraso); digitalWrite (10, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (11, ALTA); escritura digital (13, ALTA); retraso (retraso); digitalWrite (11, BAJO); digitalWrite (13, BAJO); retraso (5); Retraso =analogRead (0); Retraso =mapa (Retraso, 0, 1023, 60, 2000); escritura digital (12, ALTA); retraso (retraso); digitalWrite (12, BAJO); retraso (5); }} Piezas y carcasas personalizadas
Esquemas
Proceso de manufactura
- Motor de renuencia
- Motores paso a paso
- Placa de circuito impreso
- Los controladores integrados facilitan el diseño del motor paso a paso
- Prototipo de Raspoulette
- Torreta centinela Nerf autónoma
- Biblioteca de motores paso a paso bipolares
- Swiper - Auto Tinder / Bumble Swiper
- La zona gris entre servomotores y motores paso a paso
- ¿Qué es un motor lineal?
- ¿Qué es un servomotor?