


Motores paso a paso
Motor paso a paso frente a servomotor
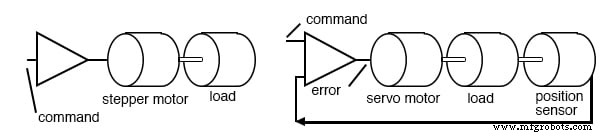
Un motor paso a paso es una versión "digital" del motor eléctrico. El rotor se mueve en pasos discretos según las órdenes, en lugar de girar continuamente como un motor convencional. Cuando está detenido pero energizado, un paso a paso (abreviatura de motor paso a paso) mantiene su carga estable con un par de retención .
La amplia aceptación del motor paso a paso en las últimas dos décadas fue impulsada por el auge de la electrónica digital. La electrónica moderna del controlador de estado sólido fue la clave de su éxito. Y los microprocesadores interactúan fácilmente con los circuitos del controlador del motor paso a paso.
En cuanto a la aplicación, el predecesor del motor paso a paso fue el servomotor. Hoy en día, esta es una solución de mayor costo para aplicaciones de control de movimiento de alto rendimiento. El gasto y la complejidad de un servomotor se deben a los componentes adicionales del sistema:sensor de posición y amplificador de error). Sigue siendo la forma de colocar cargas pesadas más allá del alcance de los motores paso a paso de menor potencia.
La alta aceleración o la precisión inusualmente alta aún requieren un servomotor. De lo contrario, el valor predeterminado es el paso a paso debido a la electrónica de transmisión simple, buena precisión, buen par, velocidad moderada y bajo costo.
Motor paso a paso frente a servomotor
Un motor paso a paso coloca los cabezales de lectura y escritura en una unidad de disquete. Alguna vez se usaron para el mismo propósito en discos duros. Sin embargo, la alta velocidad y precisión requeridas para el posicionamiento moderno del cabezal del disco duro requiere el uso de un servomotor lineal (bobina móvil).
El servoamplificador es un amplificador lineal con algunos componentes discretos difíciles de integrar. Se requiere un esfuerzo de diseño considerable para optimizar la ganancia del servoamplificador frente a la respuesta de fase a los componentes mecánicos. Los controladores del motor paso a paso son interruptores de estado sólido menos complejos, ya sea en "encendido" o "apagado". Por lo tanto, un controlador de motor paso a paso es menos complejo y costoso que un controlador de servomotor.
Sincronización lenta Los motores síncronos pueden funcionar con voltaje de línea de CA como un motor de inducción de condensador permanente monofásico. El condensador genera un 90 ° segunda fase. Con la tensión de línea directa, tenemos un variador de 2 fases.
Manejar formas de onda de bipolar (±) ondas cuadradas de 2-24 V son más comunes en estos días. Los campos magnéticos bipolares también se pueden generar desde unipolar (una polaridad) voltajes aplicados a extremos alternos de un devanado con toma central (figura siguiente).
En otras palabras, la CC se puede cambiar al motor para que vea CA. A medida que los devanados se energizan en secuencia, el rotor se sincroniza con el consiguiente campo magnético del estator. Por lo tanto, tratamos los motores paso a paso como una clase de motor síncrono de CA.
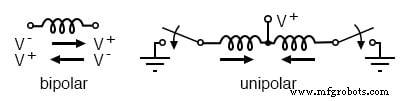
Una unidad unipolar de una bobina con toma central en (b), emula la corriente CA en una sola bobina en (a)
Características
Los motores paso a paso son resistentes y económicos porque el rotor no contiene anillos colectores de bobinado ni conmutador. El rotor es un sólido cilíndrico, que también puede tener polos salientes o dientes finos. La mayoría de las veces, el rotor es un imán permanente.
Puede determinar que el rotor es un imán permanente mediante la rotación manual sin energía que muestra par de retención , pulsaciones de par. Las bobinas de los motores paso a paso se enrollan dentro de un estator laminado, a excepción de pueden apilarse construcción. Puede haber tan solo dos fases de bobinado o hasta cinco.
Estas fases se dividen con frecuencia en pares. Así, un motor paso a paso de 4 polos puede tener dos fases compuestas por pares de polos en línea espaciados 90 ° aparte. También puede haber varios pares de polos por fase. Por ejemplo, un motor paso a paso de 12 polos tiene 6 pares de polos, tres pares por fase.
Dado que los motores paso a paso no giran necesariamente de forma continua, no existe una clasificación de potencia. Si giran continuamente, ni siquiera se acercan a una capacidad nominal sub-fraccional. Son dispositivos realmente pequeños de baja potencia en comparación con otros motores.
Tienen valores de torsión de mil in-oz (pulgadas-onzas) o diez N-m (newton-metros) para una unidad de tamaño de 4 kg. Un pequeño paso a paso del tamaño de una moneda de diez centavos tiene un par de una centésima de newton-metro o unas pocas pulgadas-onzas. La mayoría de los motores paso a paso tienen unas pocas pulgadas de diámetro con una fracción de un par de n-mo unas pocas on-oz.
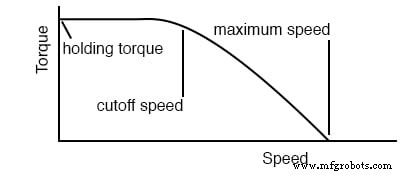
El par disponible es una función de la velocidad del motor, la inercia de la carga, el par de la carga y la electrónica del variador, como se ilustra en la curva de velocidad frente a par debajo. Un motor paso a paso con energía tiene un torque de retención relativamente alto. clasificación. Hay menos torque disponible para un motor en funcionamiento, disminuyendo a cero a alguna velocidad alta.
Con frecuencia, esta velocidad no se puede alcanzar debido a la resonancia mecánica de la combinación de carga del motor.
Características de velocidad paso a paso
Los motores paso a paso se mueven paso a paso, el ángulo de paso cuando se cambian las formas de onda de la unidad. El ángulo de paso está relacionado con los detalles de construcción del motor:número de bobinas, número de polos, número de dientes. Puede ser de 90 ° hasta 0,75 ° , correspondiente a 4 a 500 pasos por revolución.
Los componentes electrónicos de la unidad pueden reducir a la mitad el ángulo de paso moviendo el rotor en semitonos .
Los motores paso a paso no pueden alcanzar las velocidades en la curva de velocidad-par instantáneamente. La frecuencia máxima de inicio es la velocidad más alta a la que se puede iniciar un motor paso a paso detenido y descargado. Cualquier carga hará que este parámetro sea inalcanzable.
En la práctica, la frecuencia de paso aumenta durante el arranque desde muy por debajo de la frecuencia de arranque máxima. Al detener un motor paso a paso, la velocidad de paso puede reducirse antes de detenerse.
El par máximo al que un motor paso a paso puede arrancar y detenerse es el par de tracción . Esta carga de par en el motor paso a paso se debe a cargas de fricción (freno) e inerciales (volante) en el eje del motor. Una vez que el motor alcanza la velocidad, par de extracción es el par máximo sostenible sin perder pasos.
Hay tres tipos de motores paso a paso en orden de complejidad creciente:reluctancia variable, imán permanente e híbrido. El paso a paso de reluctancia variable tiene un rotor de acero blando sólido con polos salientes. El paso a paso de imán permanente tiene un rotor de imán permanente cilíndrico.
El paso a paso híbrido tiene dientes de acero blando agregados al rotor de imán permanente para un ángulo de paso más pequeño.
Paso a paso de renuencia variable
Un motor paso a paso de reluctancia variable se basa en el flujo magnético que busca la ruta de desgana más baja a través de un circuito magnético. Esto significa que un rotor magnético blando de forma irregular se moverá para completar un circuito magnético, minimizando la longitud de cualquier espacio de aire de alta reticencia.
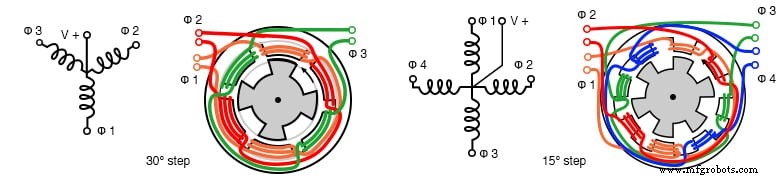
El estator normalmente tiene tres devanados distribuidos entre pares de polos, el rotor cuatro polos salientes, produciendo un 30 ° ángulo de paso. Un paso a paso desenergizado sin par de retención cuando se gira con la mano se identifica como un paso a paso de tipo de reluctancia variable.
Motores paso a paso de reluctancia variable trifásicos y cuatrifásicos
Las formas de onda de control para el paso a paso de 3 φ se pueden ver en la sección "Motor de reluctancia". La unidad para un paso a paso de 4 φ se muestra en la Figura siguiente. La conmutación secuencial de las fases del estator produce un campo magnético giratorio que sigue el rotor.
Sin embargo, debido al menor número de polos del rotor, el rotor se mueve menos que el ángulo del estator para cada paso. Para un motor paso a paso de reluctancia variable, el ángulo de paso viene dado por:
ΘS =360o / NS ΘR =360o / NR ΘST =ΘR - ΘS donde:ΘS =ángulo del estator, ΘR =ángulo del rotor, ΘST =ángulo de paso NS =número de polos del estator, NP =número de polos del rotor
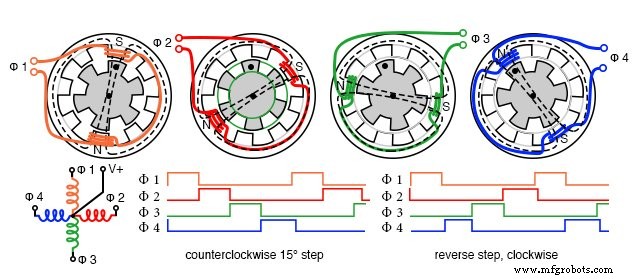
Secuencia de pasos para paso a paso de reluctancia variable
En la figura anterior, moviéndose de φ1 a φ2, etc., el campo magnético del estator gira en el sentido de las agujas del reloj. El rotor se mueve en sentido antihorario (CCW). ¡Tenga en cuenta lo que no sucede! El diente del rotor punteado no se mueve al siguiente diente del estator. En cambio, el campo del estator φ2 atrae un diente diferente al mover el rotor en sentido antihorario, que es un ángulo más pequeño (15 ° ) que el ángulo del estator de 30 ° .
El ángulo del diente del rotor de 45 ° entra en el cálculo mediante la ecuación anterior. El rotor se movió en sentido antihorario al siguiente diente del rotor a 45 ° , pero se alinea con una CW en 30 ° diente del estator. Por lo tanto, el ángulo de paso real es la diferencia entre un ángulo de estator de 45 ° y un ángulo de rotor de 30 °.
¿Cuánto giraría el motor paso a paso si el rotor y el estator tuvieran el mismo número de dientes? Cero:sin notación.
Comenzando en reposo con la fase φ1 energizada, se requieren tres pulsos (φ2, φ3, φ4) para alinear el diente del rotor "punteado" con el siguiente diente del estator en sentido antihorario, que es de 45 ° . Con 3 pulsos por diente de estator y 8 dientes de estator, 24 pulsos o pasos mueven el rotor 360 ° .
Al invertir la secuencia de pulsos, la dirección de rotación se invierte arriba a la derecha. La dirección, la velocidad de paso y una serie de pasos son controlados por un controlador de motor paso a paso que alimenta un controlador o amplificador. Esto podría combinarse en una sola placa de circuito.
El controlador podría ser un microprocesador o un circuito integrado especializado. El controlador no es un amplificador lineal, sino un simple interruptor de encendido y apagado capaz de generar una corriente lo suficientemente alta como para energizar el paso a paso. En principio, el controlador podría ser un relé o incluso un interruptor de palanca para cada fase. En la práctica, el controlador son interruptores de transistores discretos o un circuito integrado.
Tanto el controlador como el controlador se pueden combinar en un solo circuito integrado que acepta un comando directo y un pulso de paso. Envía corriente a las fases adecuadas en secuencia.
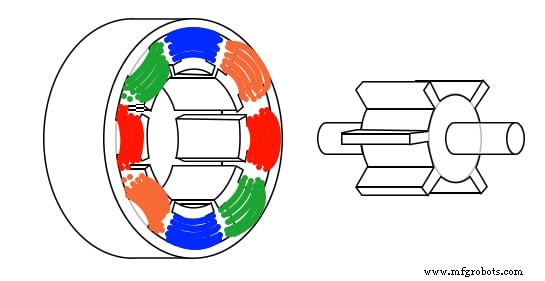
Motor paso a paso de reluctancia variable
Puede desmontar un paso a paso de renuencia para ver los componentes internos. La construcción interna de un motor paso a paso de reluctancia variable se muestra en la figura anterior. El rotor tiene polos que sobresalen para que puedan ser atraídos por el campo del estator giratorio cuando se cambia. Un motor real es mucho más largo que nuestra ilustración simplificada.
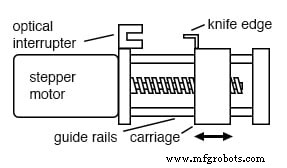
El paso a paso de reluctancia variable impulsa el tornillo de avance
El eje suele estar equipado con un tornillo de accionamiento (figura anterior). Esto puede mover las cabezas de una unidad de disquete al recibir una orden del controlador de la unidad de disquete.
Los motores paso a paso de reluctancia variable se aplican cuando solo se requiere un nivel moderado de par y un ángulo de paso grueso es adecuado. Una unidad de tornillo, como se usa en una unidad de disquete, es una aplicación de este tipo. Cuando el controlador se enciende, no conoce la posición del carro.
Sin embargo, puede conducir el carro hacia el interruptor óptico, calibrando la posición en la que el filo corta el interruptor como "casa". El controlador cuenta los pulsos de paso desde esta posición. Siempre que el par de carga no exceda el par del motor, el controlador conocerá la posición del carro.
Resumen:motor paso a paso de reluctancia variable
- El rotor es un cilindro de hierro dulce con polos salientes (que sobresalen).
- Este es el motor paso a paso menos complejo y más económico.
- El único tipo de motor paso a paso sin par de retención en la rotación manual de un eje de motor desenergizado.
- Gran ángulo de paso
- A menudo se monta un tornillo de avance en el eje para un movimiento de paso lineal.
Paso a paso de imán permanente
Un motor paso a paso de imán permanente tiene un rotor de imán permanente cilíndrico. El estator suele tener dos devanados. Los devanados se pueden roscar en el centro para permitir un unipolar circuito controlador donde la polaridad del campo magnético cambia al cambiar un voltaje de un extremo al otro del devanado.
Un bipolar Se requiere un accionamiento de polaridad alterna para alimentar los devanados sin la toma central. Un paso a paso de imán permanente puro suele tener un ángulo de paso grande. La rotación del eje de un motor desenergizado presenta un par de retención. Si el ángulo de retención es grande, digamos 7.5 ° a 90 ° , es probable que sea un paso a paso de imán permanente en lugar de un paso a paso híbrido.
Los motores paso a paso de imanes permanentes requieren corrientes alternas en fase aplicadas a los dos (o más) devanados. En la práctica, casi siempre se trata de ondas cuadradas generadas a partir de CC por componentes electrónicos de estado sólido.
El bipolar El impulso son ondas cuadradas que alternan entre las polaridades (+) y (-), digamos, +2.5 V a -2.5 V. Unipolar El impulsor suministra un flujo magnético alterno (+) y (-) a las bobinas desarrollado a partir de un par de ondas cuadradas positivas aplicadas a los extremos opuestos de una bobina con derivación central. La sincronización de la onda bipolar o unipolar es impulso de onda, paso completo o medio paso.
Wave Drive
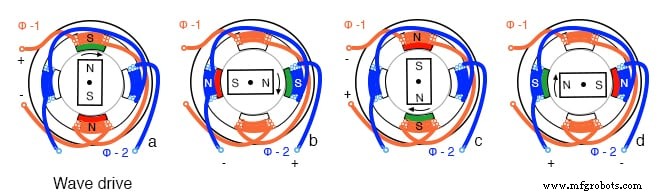
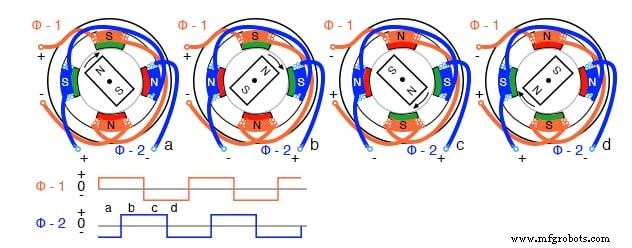
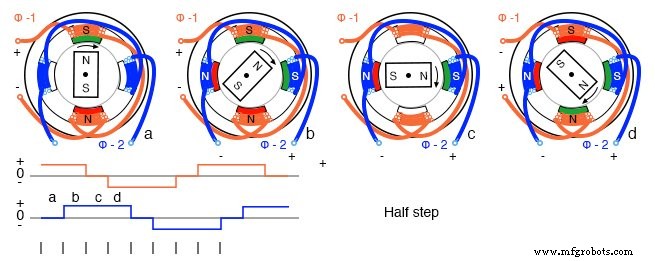
Secuencia de impulso de ondas PM (a) φ1 +, (b) φ2 +, (c) φ1-, (d) φ2-
Conceptualmente, el impulso más simple es el impulso por ondas . La secuencia de rotación de izquierda a derecha es positiva φ-1 señala el polo norte del rotor hacia arriba, (+) φ-2 señala el rotor hacia el norte a la derecha, φ-1 negativo atrae el rotor hacia el norte hacia abajo, (-) φ-2 señala el rotor hacia la izquierda. Las formas de onda de impulsión de onda a continuación muestran que solo se energiza una bobina a la vez. Si bien es simple, esto no produce tanto torque como otras técnicas de transmisión.
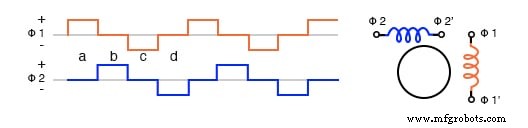
Formas de onda:impulsión de onda bipolar
Las formas de onda (figura anterior) son bipolares porque ambas polaridades, (+) y (-) impulsan el paso a paso. El campo magnético de la bobina se invierte porque la polaridad de la corriente de excitación se invierte.
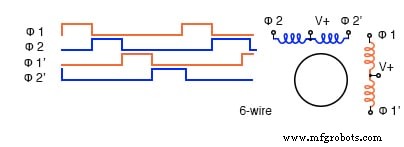
Formas de onda:impulsión de onda unipolar
Las formas de onda (figura anterior) son unipolares porque solo se requiere una polaridad. Esto simplifica la electrónica de la unidad, pero requiere el doble de controladores. Hay el doble de formas de onda porque se requiere un par de ondas (+) para producir un campo magnético alterno mediante la aplicación en los extremos opuestos de una bobina con toma central.
El motor requiere campos magnéticos alternos. Estos pueden ser producidos por ondas unipolares o bipolares. Sin embargo, las bobinas del motor deben tener tomas centrales para el accionamiento unipolar.
Los motores paso a paso de imán permanente se fabrican con varias configuraciones de cables conductores.
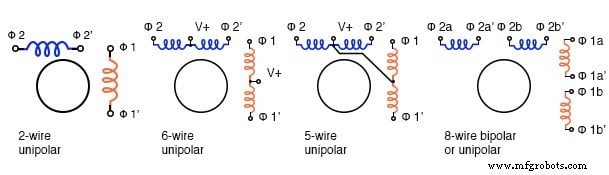
Diagramas de cableado del motor paso a paso
- El motor de 4 cables solo puede funcionar con formas de onda bipolares.
- El motor de 6 hilos, la disposición más común, está diseñado para transmisión unipolar debido a las derivaciones centrales. Sin embargo, puede ser impulsado por ondas bipolares si se ignoran los toques centrales.
- El motor de 5 hilos solo puede ser impulsado por ondas unipolares, ya que la toma central común interfiere si ambos devanados se energizan simultáneamente.
- La configuración de 8 cables es poco común, pero proporciona la máxima flexibilidad. Puede estar cableado para un variador unipolar como para el motor de 6 o 5 cables. Se puede conectar un par de bobinas en serie para un accionamiento bipolar de baja corriente de alto voltaje, o en paralelo para un accionamiento de alta corriente y bajo voltaje.
Un bobinado bifilar se produce enrollando las bobinas con dos cables en paralelo, a menudo un cable esmaltado rojo y verde. Este método produce relaciones de vueltas exactas de 1:1 para devanados con rosca central. Este método de enrollado es aplicable a todos los arreglos de 4 hilos excepto a los anteriores.
Unidad de paso completo
Paso completo La transmisión proporciona más par que la transmisión por onda porque ambas bobinas se energizan al mismo tiempo. Esto atrae los polos del rotor a medio camino entre los dos polos de campo. (Figura siguiente)
Paso completo, impulso bipolar
La unidad bipolar de paso completo, como se muestra arriba, tiene el mismo ángulo de paso que la unidad de onda. El accionamiento unipolar (no mostrado) requeriría un par de formas de onda unipolares para cada una de las formas de onda bipolares anteriores aplicadas a los extremos de un devanado con toma central. La unidad unipolar utiliza un circuito de controlador menos complejo y menos costoso. El costo adicional de la unidad bipolar se justifica cuando se requiere más torque.
Unidad de medio paso
El ángulo de paso para una geometría de motor paso a paso determinada se reduce a la mitad con medio paso conducir. Esto corresponde al doble de pulsos de paso por revolución. (Imagen siguiente) El medio paso proporciona una mayor resolución en el posicionamiento del eje del motor.
Por ejemplo, dar medio paso al motor que mueve el cabezal de impresión sobre el papel de una impresora de inyección de tinta duplicaría la densidad de puntos.
Medio paso, impulso bipolar
La transmisión de medio paso es una combinación de transmisión de onda y transmisión de paso completo con un devanado energizado, seguido de ambos devanados energizados, lo que produce el doble de pasos. Las formas de onda unipolares para la unidad de medio paso se muestran arriba. El rotor se alinea con los polos de campo como para el impulso de onda y entre los polos como para el impulso de paso completo.
Los micropasos son posibles con controladores especializados. Al variar, las corrientes a los devanados sinusoidalmente se pueden interpolar muchos micropasos entre las posiciones normales. La construcción de un motor paso a paso de imanes permanentes es considerablemente diferente de los dibujos anteriores.
Es deseable aumentar el número de polos más allá del ilustrado para producir un ángulo de paso más pequeño. También es deseable reducir el número de devanados, o al menos no aumentar el número de devanados para facilitar la fabricación.
Construcción
La construcción de un motor paso a paso de imanes permanentes es considerablemente diferente de los dibujos anteriores. Es deseable aumentar el número de polos más allá del ilustrado para producir un ángulo de paso más pequeño. También es deseable reducir el número de devanados, o al menos no aumentar el número de devanados para facilitar la fabricación.
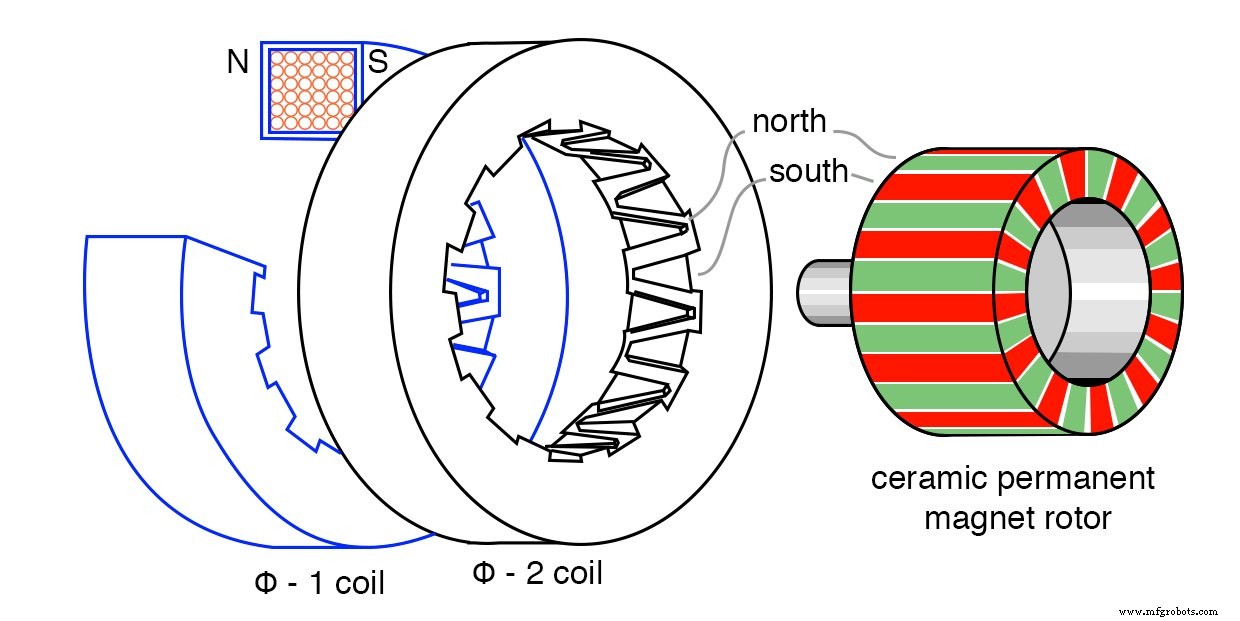
Motor paso a paso de imán permanente, construcción de apilamiento de 24 polos
El paso a paso de imán permanente solo tiene dos devanados, pero tiene 24 polos en cada una de las dos fases. Este estilo de construcción se conoce como se puede apilar . Un devanado de fase se envuelve con una carcasa de acero dulce, con los dedos llevados al centro.
Una fase, de forma transitoria, tendrá un lado norte y un lado sur. Cada lado se envuelve alrededor del centro de la rosquilla con doce dedos interdigitados para un total de 24 polos. Estos dedos alternados de norte a sur atraerán el rotor de imán permanente.
Si se invirtiera la polaridad de la fase, el rotor saltaría 360 ° / 24 =15 ° . No sabemos en qué dirección, que no es útil. Sin embargo, si energizamos φ-1 seguido de φ-2, el rotor se moverá 7.5 ° porque el φ-2 está desplazado (girado) 7,5 ° de φ-1. Consulte a continuación la compensación. Y rotará en una dirección reproducible si se alternan las fases.
La aplicación de cualquiera de las formas de onda anteriores hará girar el rotor de imán permanente.
Tenga en cuenta que el rotor es un cilindro de cerámica de ferrita gris magnetizado en el patrón de 24 polos que se muestra. Esto se puede ver con una película visora magnética o limaduras de hierro aplicadas a un envoltorio de papel. Sin embargo, los colores serán verdes para los polos norte y sur con la película.
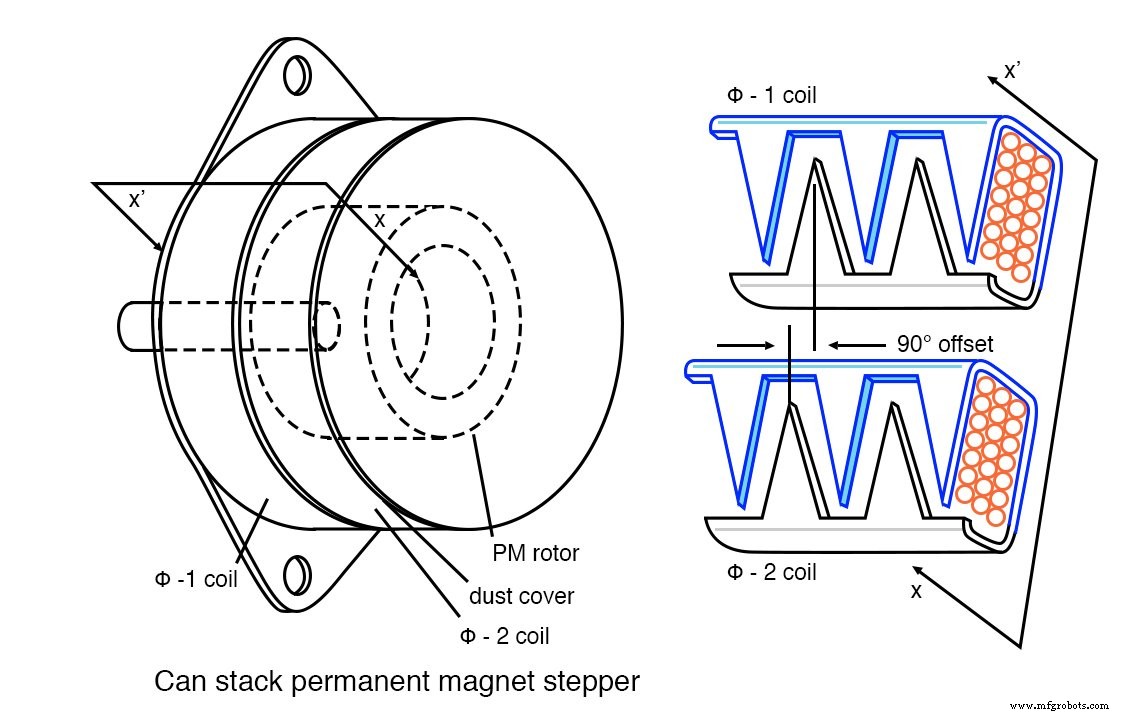
(a) Vista externa de la pila de latas, (b) detalle del desplazamiento del campo
La construcción estilo can-stack de un motor paso a paso PM es distintiva y fácil de identificar por las "latas" apiladas (figura anterior). Tenga en cuenta el desplazamiento de rotación entre las secciones de dos fases. Esto es clave para hacer que el rotor siga la conmutación de los campos entre las dos fases.
Resumen:motor paso a paso de imanes permanentes
- El rotor es un imán permanente, a menudo un manguito de ferrita magnetizado con numerosos polos.
- La construcción de apilamiento de latas proporciona numerosos postes de una sola bobina con dedos intercalados de hierro dulce.
- Ángulo de paso de grande a moderado.
- Se utiliza a menudo en impresoras de computadora para hacer avanzar el papel.
Motor paso a paso híbrido
El motor paso a paso híbrido combina las características del paso a paso de reluctancia variable y del paso a paso de imán permanente para producir un ángulo de paso más pequeño. El rotor es un imán permanente cilíndrico, magnetizado a lo largo del eje con dientes radiales de hierro dulce.
Las bobinas del estator se enrollan en polos alternos con los dientes correspondientes. Normalmente hay dos fases de devanado distribuidas entre pares de polos. Este devanado se puede roscar en el centro para un accionamiento unipolar. El grifo central se logra mediante un bobinado bifilar , un par de cables enrollados físicamente en paralelo pero conectados en serie.
Los polos norte-sur de una fase intercambian polaridad cuando se invierte la corriente de excitación de fase. La unidad bipolar es necesaria para devanados sin roscar.
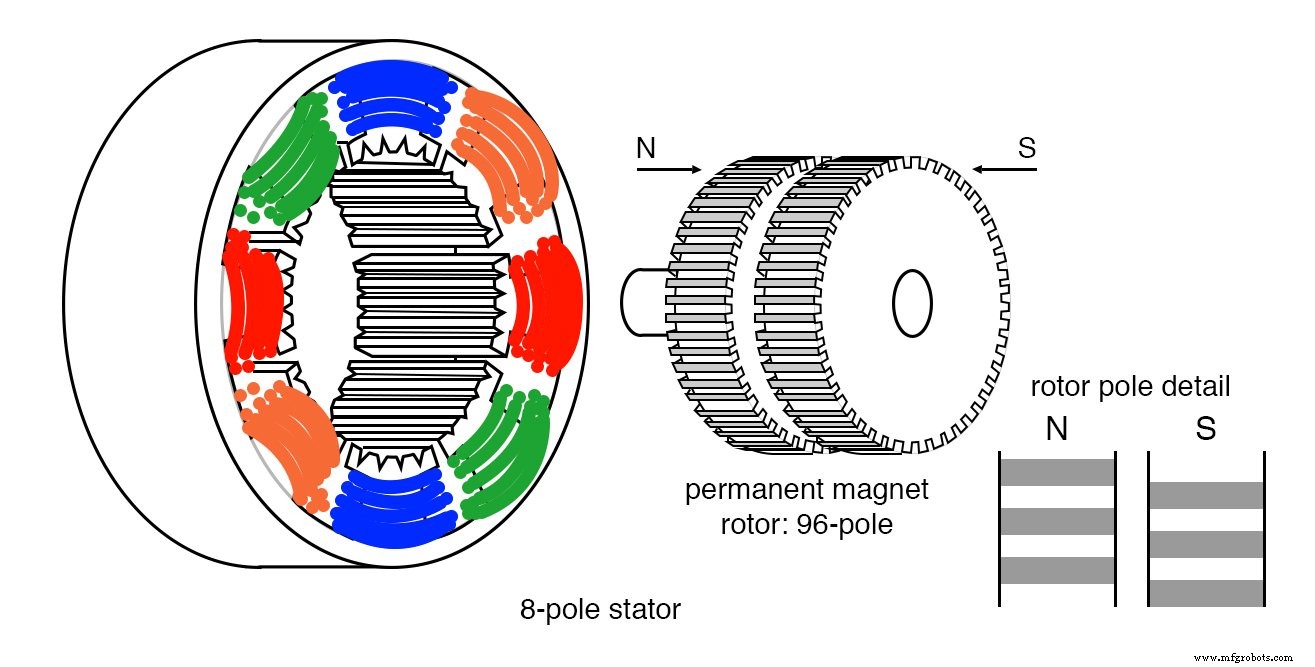
Motor paso a paso híbrido
Tenga en cuenta que los 48 dientes de una sección del rotor están separados por medio paso de la otra. (Vea el detalle del polo del rotor arriba. Este desplazamiento del diente del rotor también se muestra a continuación). Debido a este desplazamiento, el rotor tiene efectivamente 96 polos intercalados de polaridad opuesta.
Este desplazamiento permite la rotación en pasos de 1/96 de revolución al invertir la polaridad de campo de una fase. Los devanados de dos fases son comunes como se muestra arriba y abajo. Sin embargo, podría haber hasta cinco fases.
Los dientes del estator en los 8 polos corresponden a los dientes del rotor 48, excepto por los dientes faltantes en el espacio entre los polos. Por lo tanto, un polo del rotor, digamos el polo sur, puede alinearse con el estator en 48 posiciones distintas. Sin embargo, los dientes del polo sur están separados de los dientes del norte por medio diente.
Por lo tanto, el rotor puede alinearse con el estator en 96 posiciones distintas. Este desplazamiento de medio diente se muestra en el detalle del polo del rotor arriba o en la Figura siguiente.
Como si esto no fuera lo suficientemente complicado, los polos principales del estator se dividen en dos fases (φ-1, φ-2). Estas fases del estator están compensadas entre sí por un cuarto de diente. Este detalle solo es discernible en los diagramas esquemáticos a continuación. El resultado es que el rotor se mueve en pasos de un cuarto de diente cuando las fases se energizan alternativamente.
En otras palabras, el rotor se mueve en 2 × 96 =192 pasos por revolución para el paso a paso anterior.
El dibujo anterior es representativo de un motor paso a paso híbrido real. Sin embargo, proporcionamos una representación gráfica y esquemática simplificada para ilustrar detalles no obvios arriba. Tenga en cuenta el número reducido de bobinas y dientes en el rotor y el estator para simplificar.
En las siguientes dos figuras, intentamos ilustrar la rotación de un cuarto de diente producida por las dos fases del estator compensadas por un cuarto de diente y la compensación de medio diente del rotor. El desplazamiento del estator de un cuarto de diente junto con la sincronización de la corriente de accionamiento también define la dirección de rotación.
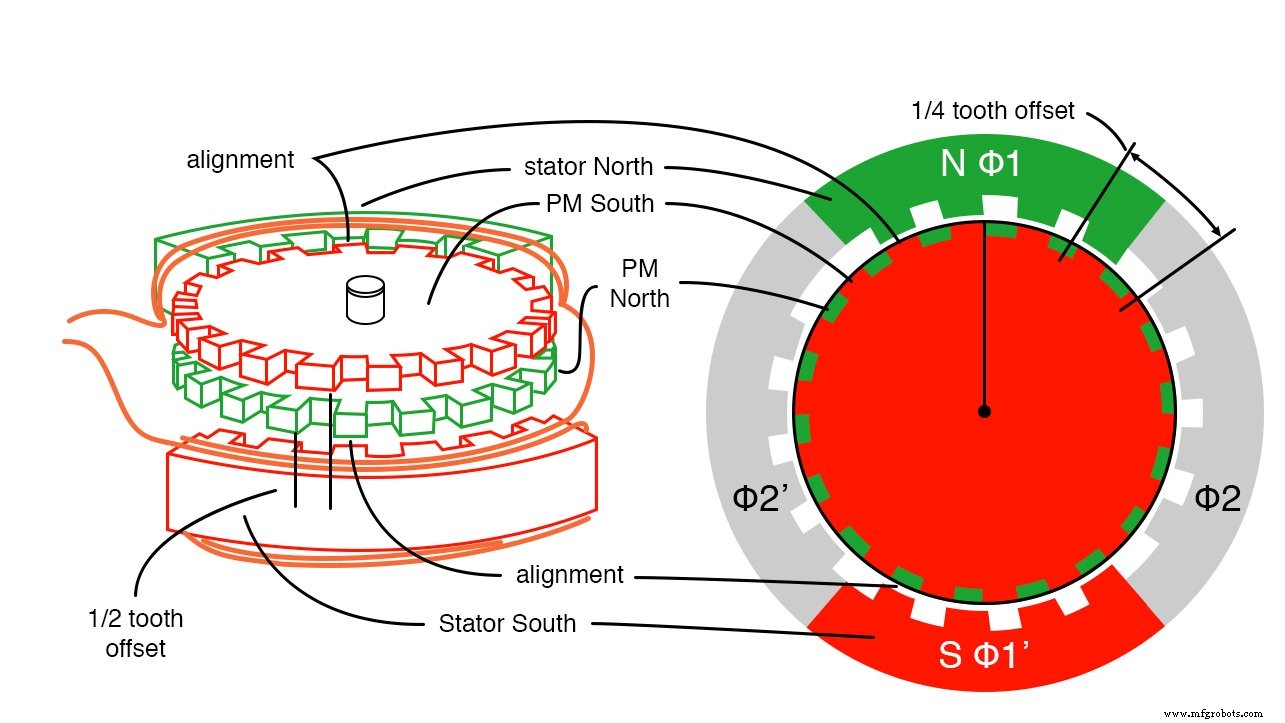
Diagrama esquemático del motor paso a paso híbrido
Funciones del esquema de pasos híbridos
- La parte superior del rotor de imán permanente es el polo sur, la parte inferior norte.
- Los dientes del rotor de norte a sur están desplazados por medio diente.
- Si el estator φ-1 se energiza temporalmente en la parte superior norte, parte inferior sur.
- Los dientes superiores del estator φ-1 se alinean al norte con los dientes superiores del rotor al sur.
- Los dientes inferiores del estator φ-1 'se alinean al sur con los dientes inferiores norte del rotor.
- Si se aplica una torsión suficiente al eje para superar la torsión de retención, el rotor se movería un diente.
- Si se invirtiera la polaridad de φ-1, el rotor se movería medio diente, dirección desconocida. La alineación sería la parte superior del estator sur hacia la parte inferior del rotor norte, la parte inferior del estator norte hacia el rotor sur.
- Los dientes del estator φ-2 no están alineados con los dientes del rotor cuando φ-1 está energizado. De hecho, los dientes del estator φ-2 están compensados por un cuarto de diente. Esto permitirá una rotación en esa cantidad si φ-1 está desenergizado y φ-2 energizado. La polaridad de φ-1 y el accionamiento determinan la dirección de rotación.
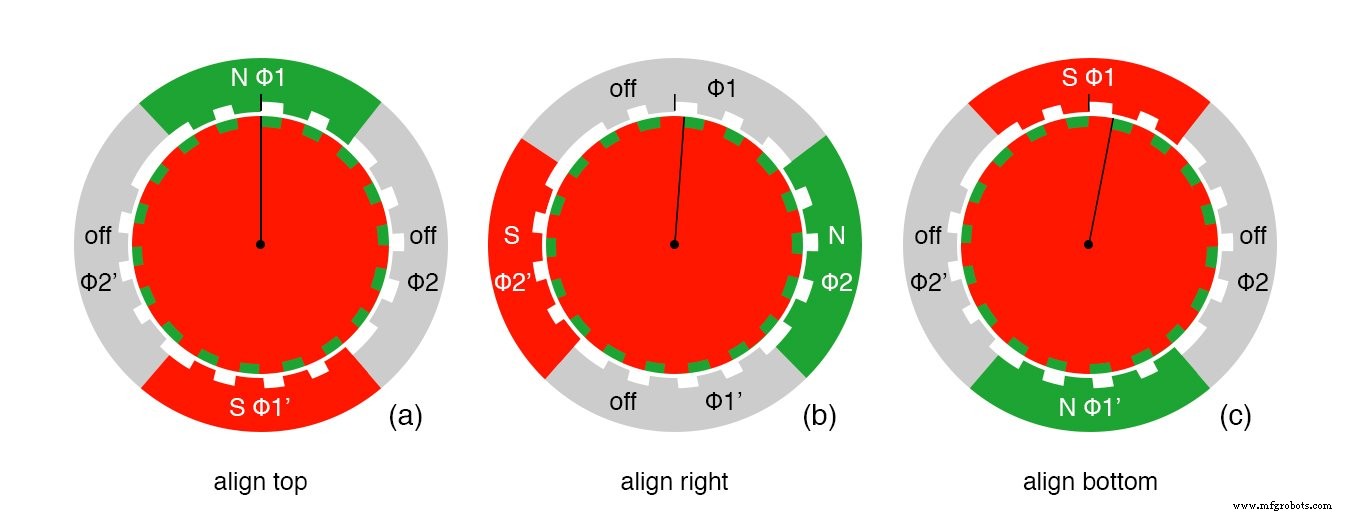
Secuencia de rotación del motor paso a paso híbrido
Rotación del motor paso a paso híbrido
- La parte superior del rotor es de imán permanente al sur, inferior al norte. Los campos φ1, φ-2 se pueden cambiar:activado, desactivado, inverso.
- (a) φ-1 =encendido =norte-arriba, φ-2 =apagado. Alinear (de arriba a abajo): φ-1 estator-N:rotor-top-S, φ-1 ’estator-S:rotor-bottom-N. Posición inicial, rotación =0.
- (b) φ-1 =apagado, φ-2 =encendido. Alinear (de derecha a izquierda): φ-2 estator-N-derecha:rotor-top-S, φ-2 ’estator-S:rotor-bottom-N. Gire 1/4 diente, rotación total =1/4 diente.
- (c) φ-1 =reverso (encendido), φ-2 =apagado. Alinear (de abajo hacia arriba): φ-1 estator-S:rotor-bottom-N, φ-1 ’estator-N:rotor-top-S. Gire 1/4 diente desde la última posición. Rotación total desde el inicio:1/2 diente.
- No se muestra:φ-1 =desactivado, φ-2 =inverso (activado). Alinear (de izquierda a derecha): Rotación total:3/4 dientes.
- No se muestra:φ-1 =activado, φ-2 =desactivado (igual que (a)). Alinear (de arriba a abajo): Rotación total 1 diente.
Un motor paso a paso sin alimentación con par de retención es un motor paso a paso de imán permanente o un paso a paso híbrido. El paso a paso híbrido tendrá un ángulo de paso pequeño, mucho menor que los 7.5 ° de steppers de imán permanente. El ángulo de paso podría ser una fracción de grado, correspondiente a unos cientos de pasos por revolución. Resumen:motor paso a paso híbrido
- El ángulo de paso es más pequeño que el de reluctancia variable o los pasos de imán permanente.
- El rotor es un imán permanente con dientes finos. Los dientes norte y sur están compensados por medio diente para un ángulo de paso más pequeño.
- Los polos del estator tienen dientes finos coincidentes del mismo paso que el rotor.
- Los devanados del estator se dividen en no menos de dos fases.
- Los polos de un devanado del estator están compensados por un cuarto de diente para un ángulo de paso aún más pequeño.
HOJA DE TRABAJO RELACIONADA:
- Hoja de trabajo de motores paso a paso
Tecnología Industrial
- Introducción a los motores de CA
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Nanotec:controlador de motor compacto para motores DC sin escobillas y motores paso a paso
- Consejo técnico:Motores
- La zona gris entre servomotores y motores paso a paso
- Seguridad de motores eléctricos:diferentes fases y medidas de seguridad
- 4 tipos principales de fallas de bobinado en motores eléctricos de CA
- Acerca de Motores Industriales y Aplicaciones
- Una introducción al motor BLDC
- Mantenimiento adecuado de los motores del compresor