


Visualización del movimiento 3D del sensor IMU
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Antes de sumergirnos en la parte del software, montemos nuestros kits de hardware.
¿Qué es un sensor MPU-6050? Los dispositivos MPU-6050 combinan un giroscopio de 3 ejes y un acelerómetro de 3 ejes en la misma matriz de silicio, junto con un Procesador de movimiento digital (DMP) integrado , que procesa el complejo MotionFusion de 6 ejes algoritmos. Entonces, ahora podrá descifrar el significado de 6DOF- 6 grados de libertad.
Para obtener detalles sobre el esquema de conexión y la configuración del hardware, consulte mi blog anterior.
Ahora, pasemos al software de procesamiento, que facilitará la visualización 3D de este sensor de movimiento.
Software requerido:
- ProcessingIDE
Teniendo en cuenta que ya ha instalado ArduinoIDE con dos IDE separados, puede que se sienta un poco confundido. Bueno, no hay necesidad de entrar en pánico. ¡Sigue los pasos a continuación y todas tus dudas se aclararán!
El procesamiento es bastante similar a ArduinoIDE excepto por algunas funciones especializadas. Entonces, verá una influencia / similitud en ProcessingIDE.
La Figura 1 y la Figura 2 aclararán mis declaraciones.

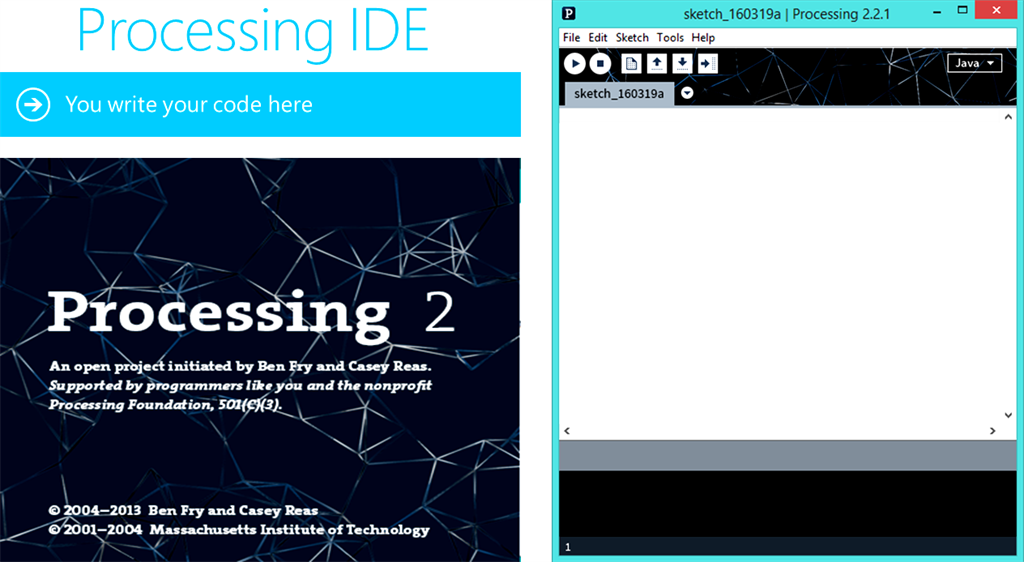
Entonces, vemos que hay una similitud visual asombrosa en estos dos IDE. Ahora que ha instalado el IDE de procesamiento, debe descargar una biblioteca especial llamada "Toxi" para fines de procesamiento. La localización de un archivo "Toxi" puede ser muy ajetreado en Internet. Entonces, te lo he hecho más fácil subiéndolo a mi github. Haga clic en este enlace y descargue el archivo llamado “toxiclibs-complete-0020”. A continuación, extraiga la carpeta. Copie el "toxiclibs-complete-0020" carpeta y péguela en "bibliotecas" carpeta de Processing. No puedo encontrar " carpeta de bibliotecas "? entonces, crea una! Sí. Si no puedes encontrar una" bibliotecas "carpeta, cree una carpeta y asígnele el nombre" bibliotecas ". Ahora, pega tu " toxiclibs-complete-0020 " carpeta dentro de él. Después de haber seguido estos pasos correctamente, ejecute el IDE de procesamiento. ¡Es hora de codificar! Para visualizar la visualización 3D, primero debe cargar el código Arduino para MPU-6050 (Extraiga el archivo .ino de la carpeta MPU6050_DMP6.rar). Después de haberlo hecho, debe realizar ciertas modificaciones como se muestra a continuación. Debe comentar este código que dice:
#define OUTPUT_READABLE_YAWPITCHROLL por // #define OUTPUT_READABLE_YAWPITCHROLL
del mismo modo, descomente el código que dice:
// # define OUTPUT_TEAPOT por #define OUTPUT_TEAPOT
A continuación, abra el ejemplo de procesamiento para el MPU-6050. Vaya a la barra de herramientas, haga clic en Archivo -> Abrir. Y luego navegue a la carpeta donde instaló la biblioteca MPU-6050 para Arduino. Puede ubicar fácilmente el ejemplo de procesamiento:siga la secuencia de flujo:MPU6050> Ejemplos> MPU6050_DMP6> Procesando> MPUTeapot. Como lo hizo en el caso de ArduinoIDE, igualmente en este caso, verifique el puerto serie que está definido en él. Ahora, verifique el código, verá que, por defecto, la línea lo define para linux / mac usuarios como:
Debe cambiar String portName al puerto en el que está conectado su Arduino. Consulte la Figura 3.

Para ventanas usuarios, comenten este código como:
// String portName ="/ dev / ttyUSB1";
Del mismo modo, descomente este código como:
// String portName ="COM15"; por String portName ="COM15";
Reemplazar " COM15 "con el puerto COM en el que está conectado su arduino (verifique esto yendo a arduino y Herramientas -> Puerto serie). Entonces, finalmente la configuración está completa, ¡ahora es solo cuestión de unos minutos! Cargue el código de Arduino (MPU6050_DMP6) a través de Arduino. Nota: NO ABRA EL MONITOR SERIAL mientras el proceso está en curso (¿Por qué? Porque visualizaremos el código en ProcessingIDE en lugar de ArduinoIDE)
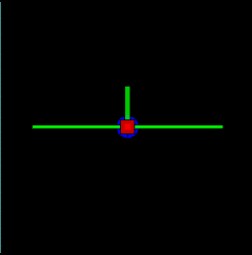
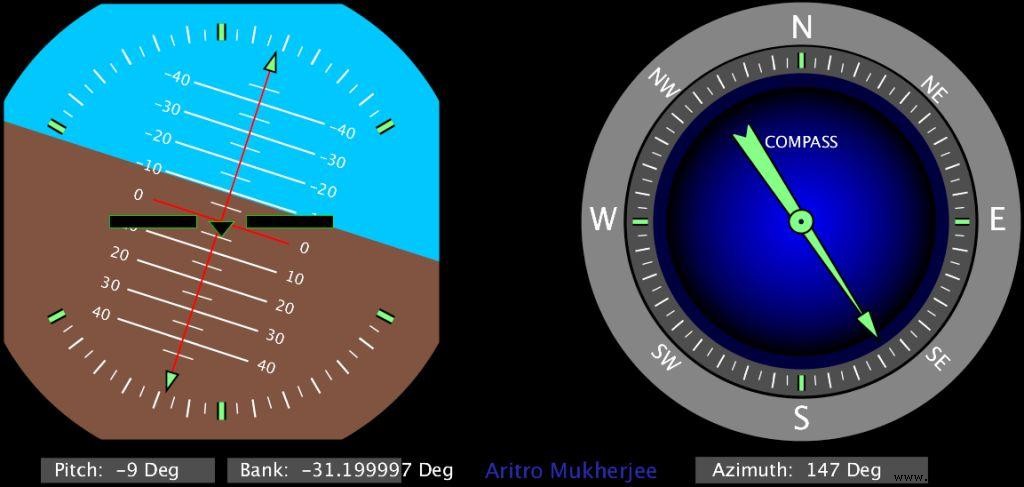
A continuación, ejecute el código de procesamiento (MPUTeapot) presionando el botón con "reproducir" símbolo. Verá un objeto parecido a un avión pequeño. Espere unos 10-12 segundos para que los valores del MPU-6050 se estabilicen. Después de lo cual, verá que el modelo 3D se mueve en consecuencia con el sensor MPU-6050. Consulte el GIF a continuación. Para una mejor comprensión, vaya a YouTube
Diseñe sus propios instrumentos de simulador de vuelo personalizados en mi próximo tutorial.
Por favor comente a continuación, si tiene algún problema con la configuración del hardware / software.
Código
Código completo del proyecto
Descargue esta carpeta y siga las instrucciones que se han especificado en este tutorial.https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zipEsquemas
Siga mi publicación de blog anterior para obtener un tutorial paso a paso sobre cómo configurar un sensor IMU (MPU-6050) con un Arduino. Enlace (https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066)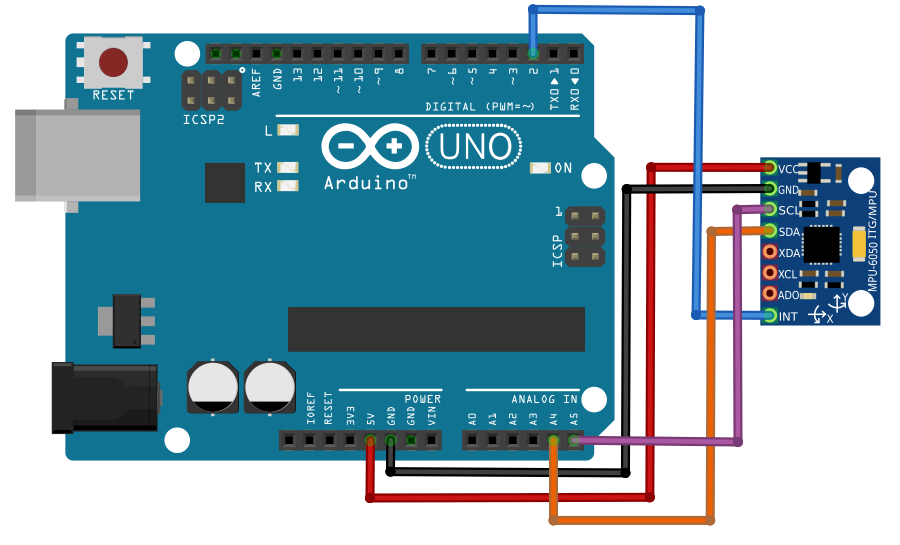
Proceso de manufactura
- Funcionamiento del sensor IMU y sus aplicaciones
- Logic-X lanza una nueva marca de productos de procesamiento de sensores COTS
- Visión por computadora como sensor de movimiento para SmartThings
- Sensor de movimiento, alarma, grabación de video en HA en Raspberry Pi
- Sistema de sensor de movimiento por infrarrojos de bricolaje para Raspberry Pi
- Sensor de movimiento con Raspberry Pi
- Sensor de temperatura Raspberry Pi
- Raspberry Pi GPIO con sensor de movimiento PIR:el mejor tutorial
- Interfaz del sensor de movimiento PIR HC-SR501 con Raspberry Pi
- Sensor de emoción / EEG
- El sensor de piel electrónico decodifica el movimiento humano