


¡Tanques láser Leap Motion!
Componentes y suministros
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Acerca de este proyecto
El objetivo de este proyecto era crear un conjunto de tanques robóticos para la batalla donde los operadores obtuvieran una sensación más realista para controlar los vehículos usando el controlador Leap Motion. Quería crear los tanques de robots a bajo costo, para que la gente pudiera replicar el proyecto lo más fácilmente posible.
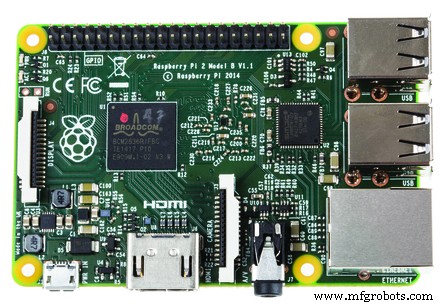
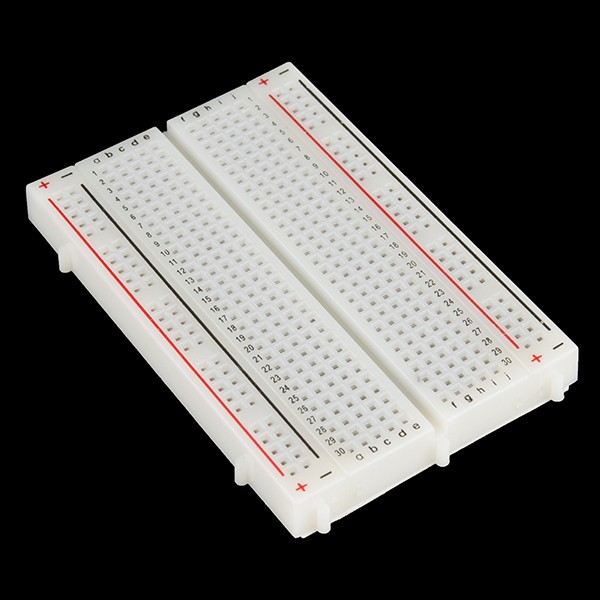
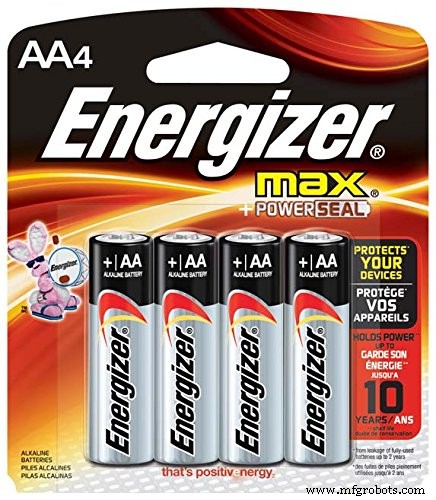
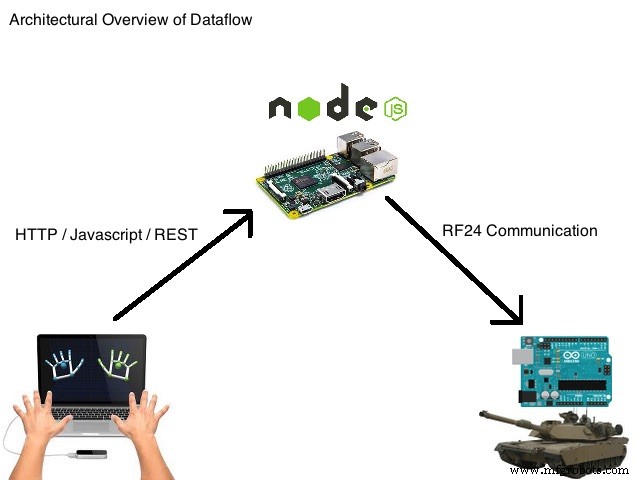
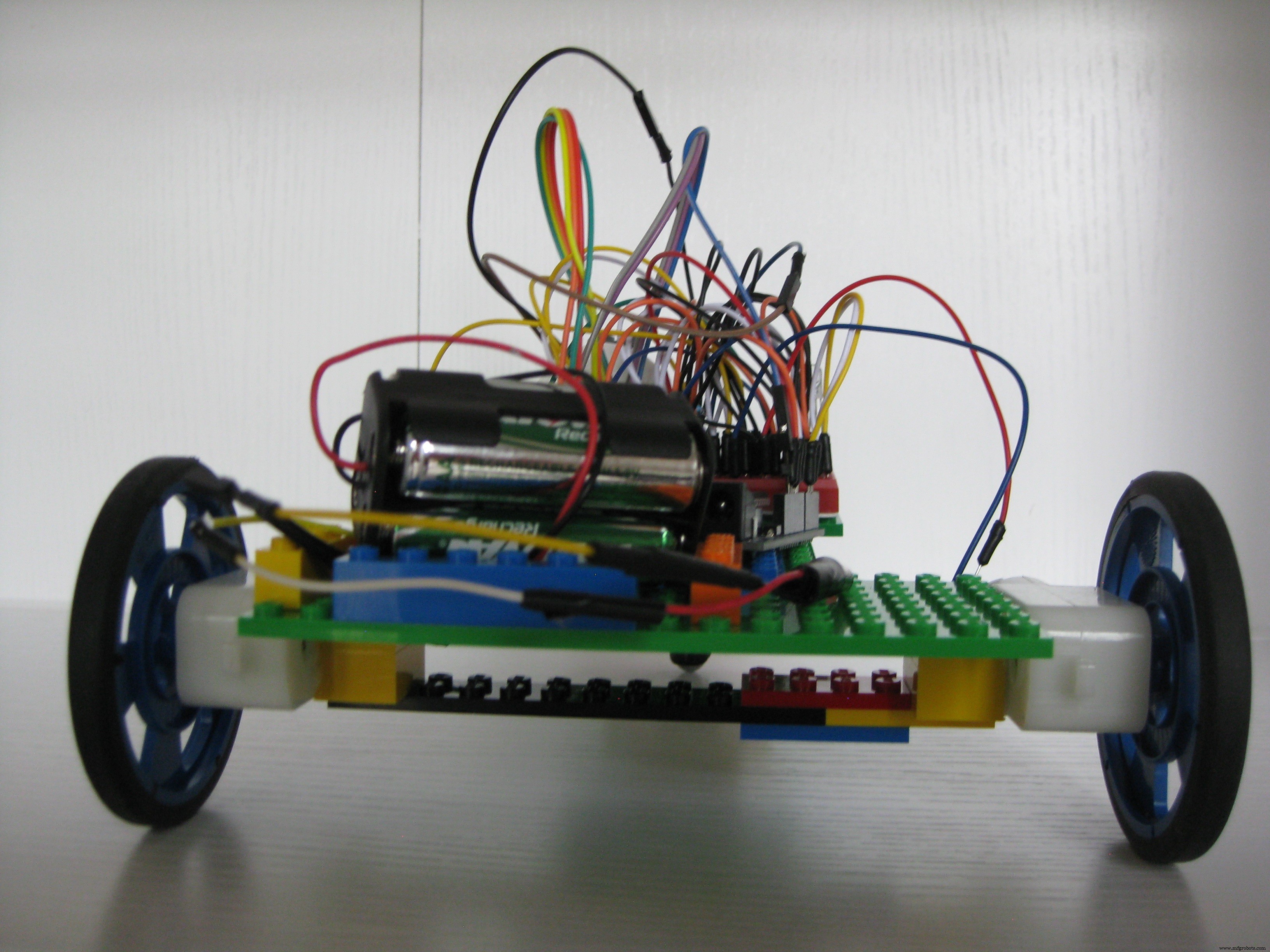
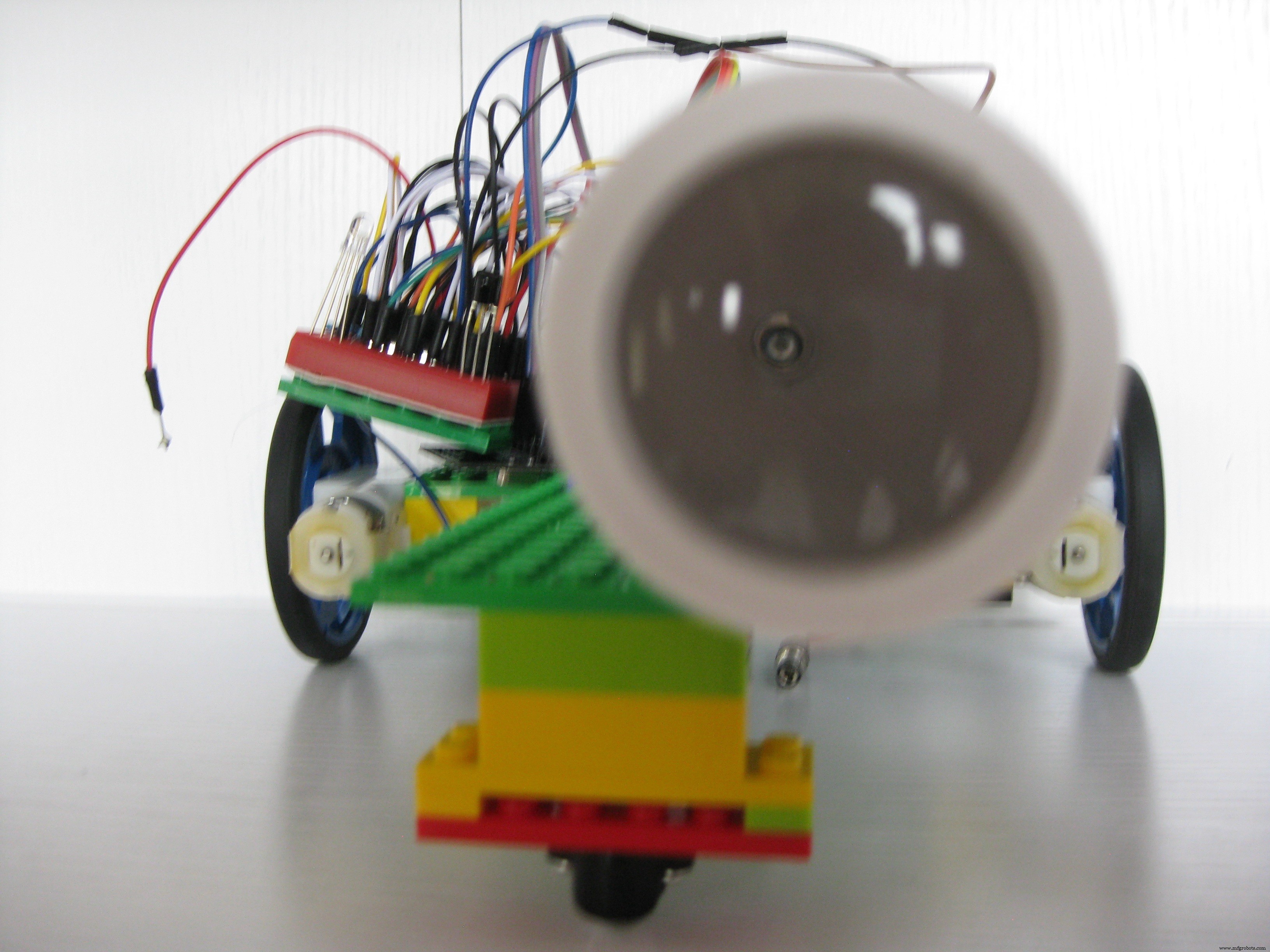
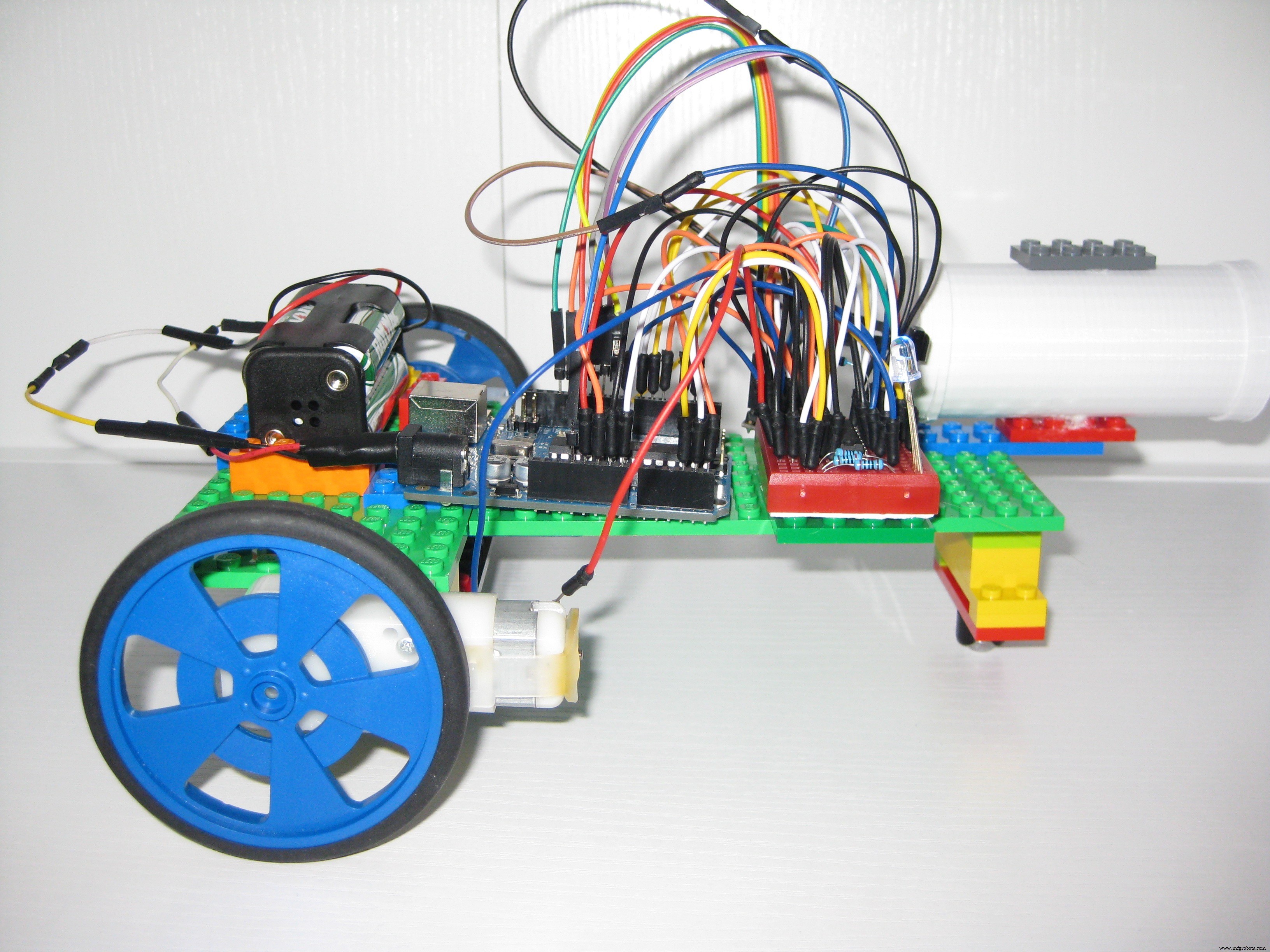
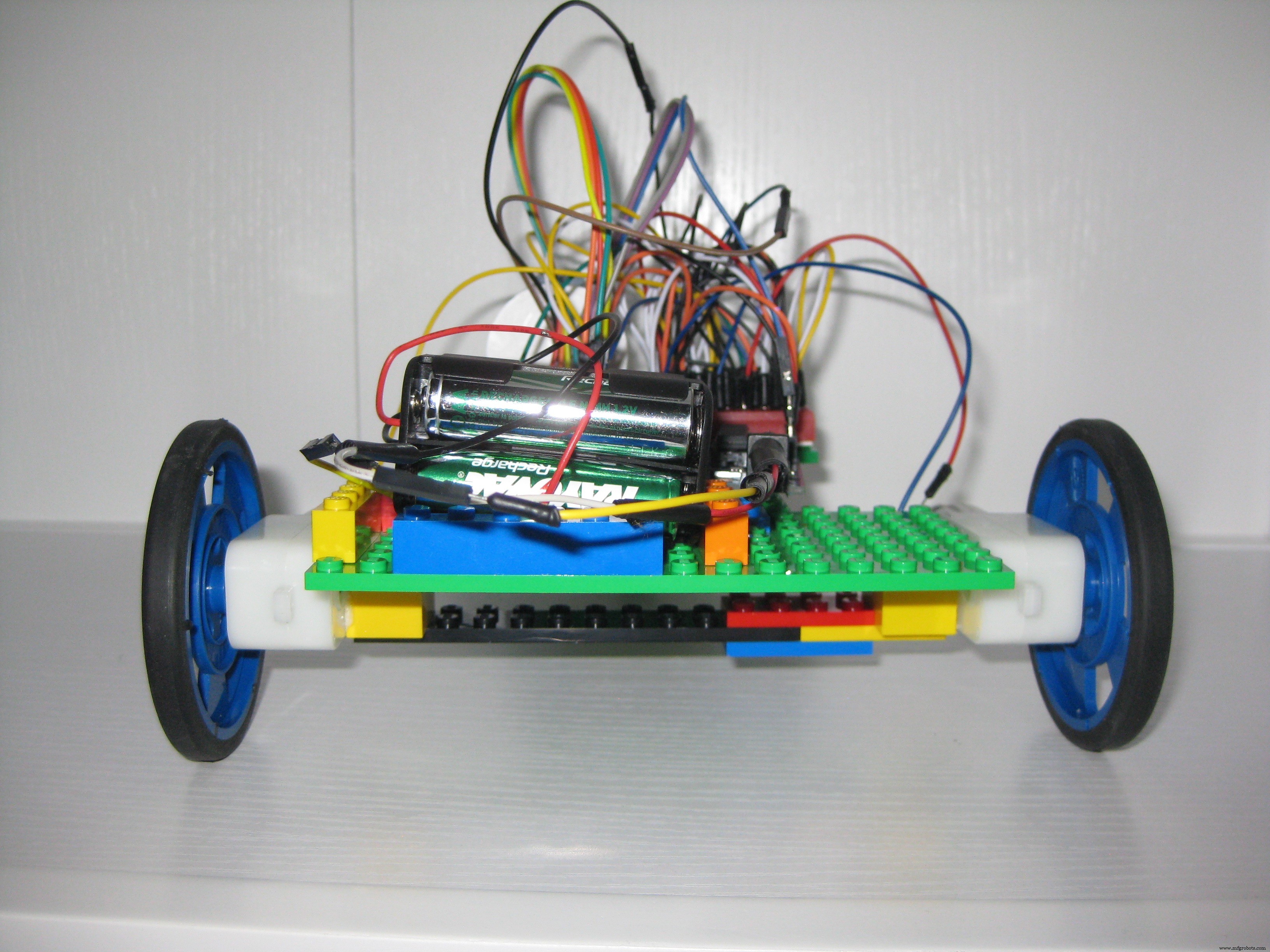
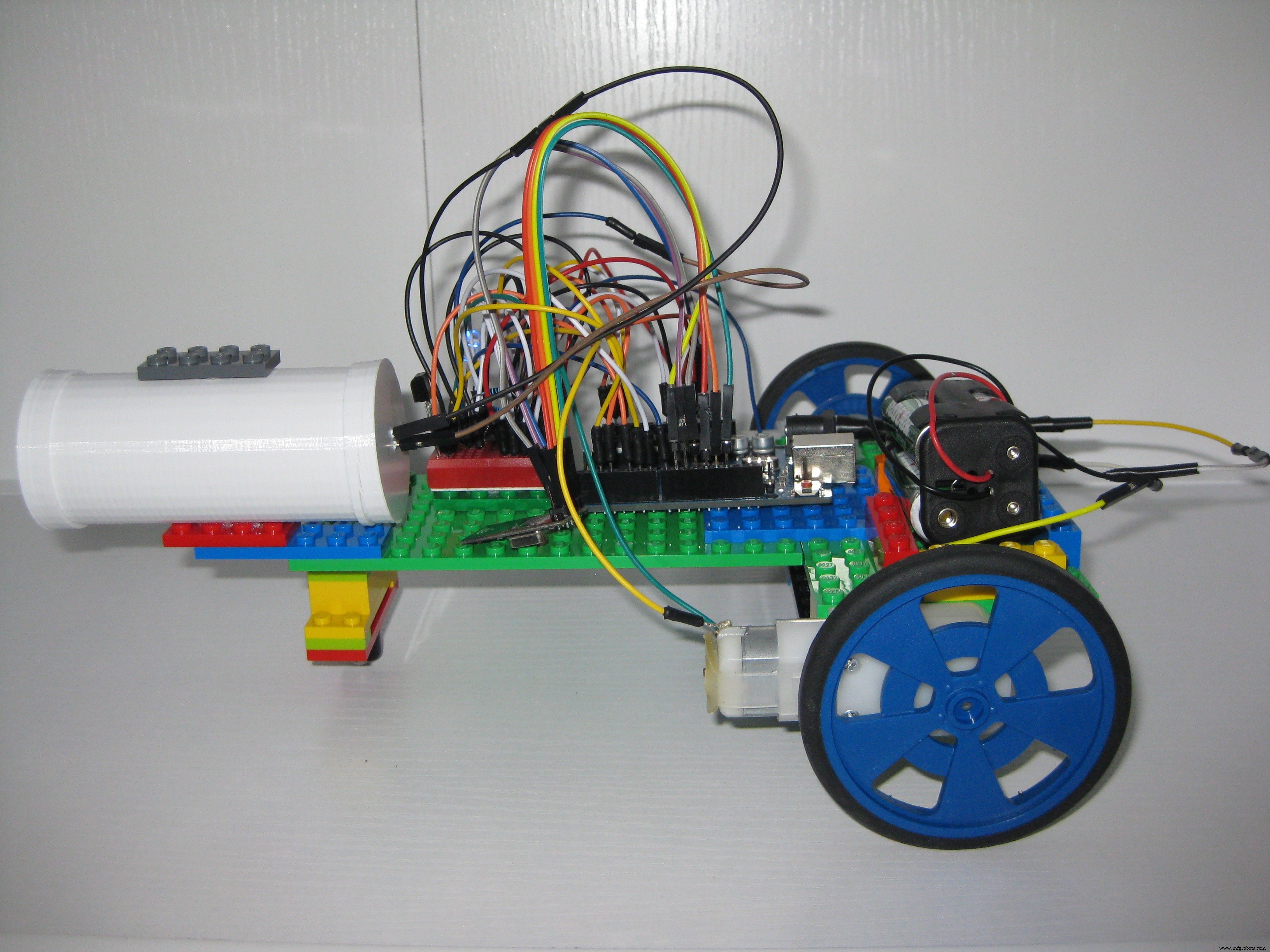
El cuerpo del tanque está hecho de placas y ladrillos genéricos de Lego. La fuente de alimentación es un bloque simple de 4 pilas recargables AA. El controlador del tanque es un Arduino Uno R3. La "propulsión" son dos motores de CC simples con ruedas en la parte trasera con una sola rueda en la parte delantera que utilizan un solo circuito integrado L293D. El "armamento" es una única luz LED de infrarrojos y la "armadura" es un conjunto de sensores de infrarrojos que detectan los impactos de los LED de infrarrojos de los tanques opuestos. La "pantalla de visualización frontal" es un solo LED multicolor que le informa de cualquier acción que ocurra en el tanque, incluido el estado de su armadura. Finalmente, el "control" del tanque se maneja de forma inalámbrica a través de una Raspberry Pi 2 con NodeJS conectado a través de un módulo inalámbrico RF24 con el que también está equipado cada tanque.
Usando las manos del operador, el Leap Motion controla el tanque usando el SDK de Leap Motion Javascript. Usando el SDK para detectar el movimiento de la mano, javascript se comunica con el servidor NodeJS en la Raspberry PI 2, que a su vez se comunica con el tanque a través del módulo RF24. Ambas manos hacia adelante, el tanque avanza. Ambas manos hacia atrás, el tanque se mueve hacia atrás. Mano izquierda hacia adelante, mano derecha hacia atrás, el tanque gira a la derecha. Mano derecha hacia adelante, mano izquierda hacia atrás, el tanque gira a la izquierda. Ambas manos en la posición "nuetral" detendrán el tanque. Una mano hacia adelante (izquierda o derecha) mientras deja caer la otra mano "disparará" el arma del tanque.
Aquí hay una demostración rápida del arma, armadura y pantalla frontal de los tanques.
Usando la armadura avanzada omnidireccional y las cajas de cartón como refugio, Laser Tanks se convierte en un juego de caza y evasión.
Pasos para la configuración del proyecto:
1) Ensamble los tanques y conéctelos usando los siguientes esquemas. Descargue las Arduinolibraries necesarias (consulte README en el repositorio de github), compile y cargue el boceto de Arduino para tank1 en un tanque y tank2 en el otro tanque.
2) Conecte el transceptor RF24 a la Raspberry Pi. Instale Raspbian OS y el nodo JS en la Pi.
3) Descargue, configure y compile (consulte README en el repositorio de github) la biblioteca RF24 en Pi.
4) Descargue el software del servidor NodeJS del sitio de github, configure e inicie el servidor de aplicaciones / servidor web (consulte README en githubrepository).
5) Instale Leap Motion y los controladores en su computadora. Abra un navegador y cargue la URL al servidor Raspberry Pi Rest / Web para cargar la página web (ver README en el repositorio de github) para controlar el tanque uno o el tanque dos.
6) Haga clic en el botón de calibración y mantenga las manos sobre el movimiento de salto para que detecte las dos manos y conozca su posición neutra. Una vez que se completa la calibración, puede controlar el tanque con sus manos.
Nota rápida sobre el chasis del tanque:
El cuerpo de los tanques se ensambla a partir de legos simples que fueron "pegados como gorila" a partes (motores, placas de prueba, etc.) del tanque para ayudar a mantenerlo unido. Aquí hay una presentación de diapositivas para mostrar cómo se hizo esto.


Una nota rápida sobre los LED infrarrojos:
Los mandos a distancia por infrarrojos son muy funcionales cuando quieres sentarte en el sofá, en el suelo o en la silla y poder cambiar de canal en tu televisor desde cualquier lugar. Los LED infrarrojos están diseñados para que el haz de luz vaya en tantas direcciones como sea posible para mejorar la cobertura. Pero, si quieres controlar que el haz del LED sea más pequeño para que sea más difícil golpear el sensor remoto (como en un juego de batalla de tanques) es un poco más difícil. En mi lectura, descubrí que al usar una lente de aumento muy simple en el extremo de un tubo, puede enfocar el rayo infrarrojo. Aquí hay un diagrama que muestra de qué estoy hablando:
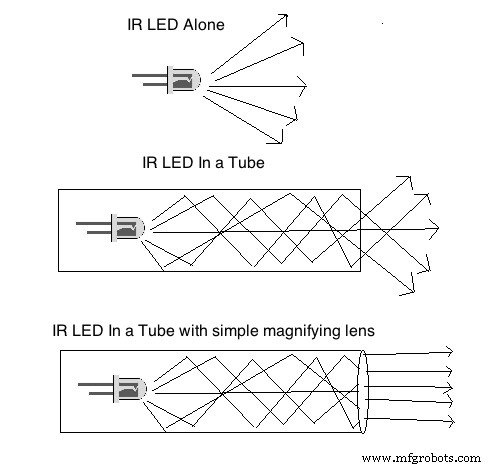
Terminé comprando una lupa de bolsillo muy económica en una farmacia, sacando la lente y construyendo un tubo alrededor de ella y teniendo el LED infrarrojo en el otro extremo del tubo, y esto funcionó perfectamente para estrechar el haz del LED IR para ser más precisos.
Una nota rápida sobre 360 grados de sensores infrarrojos
Un sensor de infrarrojos es capaz de detectar señales de un LED de infrarrojos cuando ese LED está directamente frente a él o aproximadamente a 90 grados de enfoque. Si hay un LED de infrarrojos detrás del sensor, no podrá detectar la señal enviada.
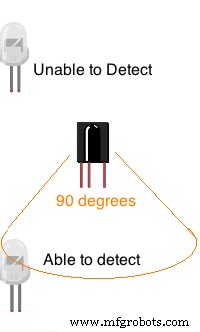
Para lograr un ángulo de detección completo de 360 grados, necesitaba modificar la biblioteca de infrarrojos para detectar señales en 4 pines diferentes de 4 sensores diferentes, o crear una solución de hardware que permitiera conectar en cadena 4 sensores para informar sobre un solo alfiler. Encontré algunos artículos en línea que mostraban cómo puede lograr esto con un circuito simple E integrado para conectar 4 sensores a un solo pin de entrada. Cuando cualquiera de los sensores infrarrojos detectaba una señal infrarroja, la informaba en ese pin. Esto permitió obtener 360 grados de detección, sin necesidad de modificar la biblioteca de infrarrojos, o utilizar hasta 4 pines de entrada.

Código
Tanques láser Github
Todos los archivos de código personalizados para el proyecto Leap Motion Laser Tanks https://github.com/corky/LaserTanksEsquemas
Usando un LED infrarrojo, el tanque dispara "códigos" que los otros tanques identifican como impactos.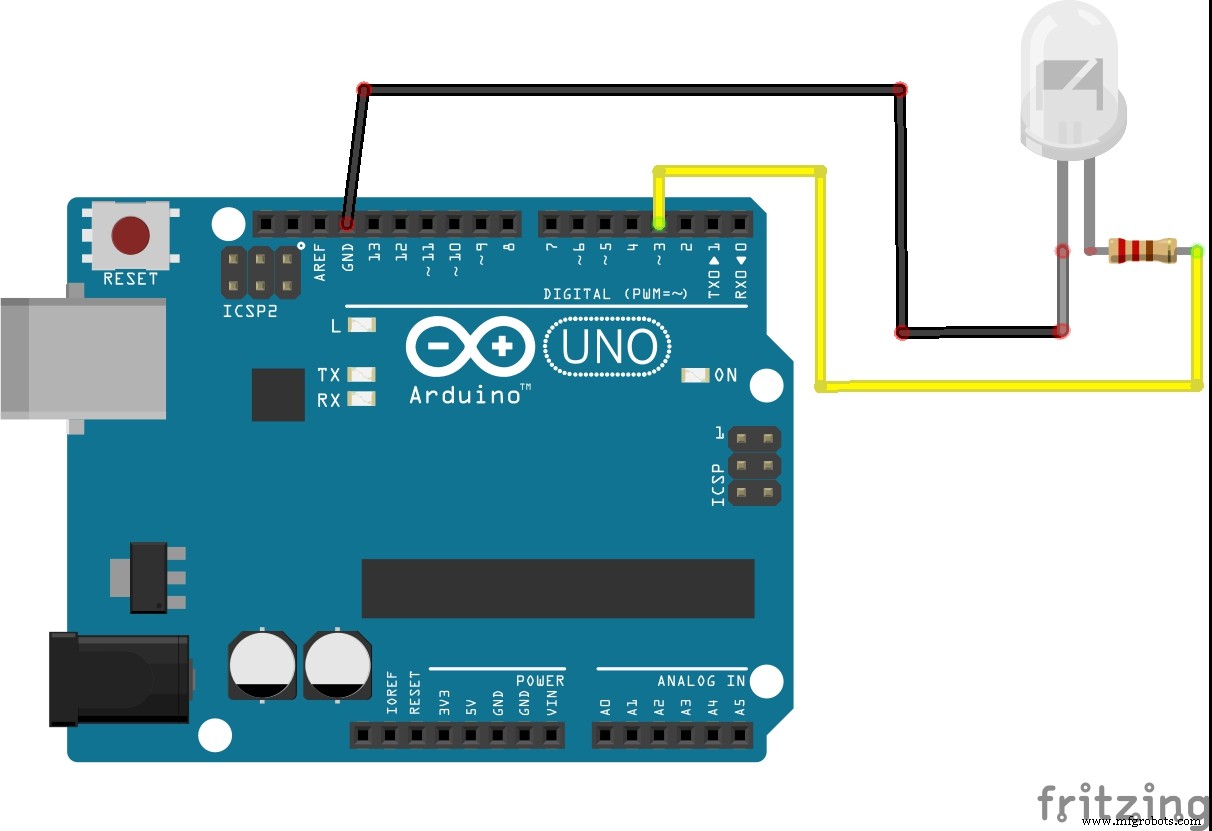 Con un solo sensor de infrarrojos, el tanque puede detectar cuando las señales de infrarrojos provienen de tanques opuestos y registrarlas como golpes
Con un solo sensor de infrarrojos, el tanque puede detectar cuando las señales de infrarrojos provienen de tanques opuestos y registrarlas como golpes 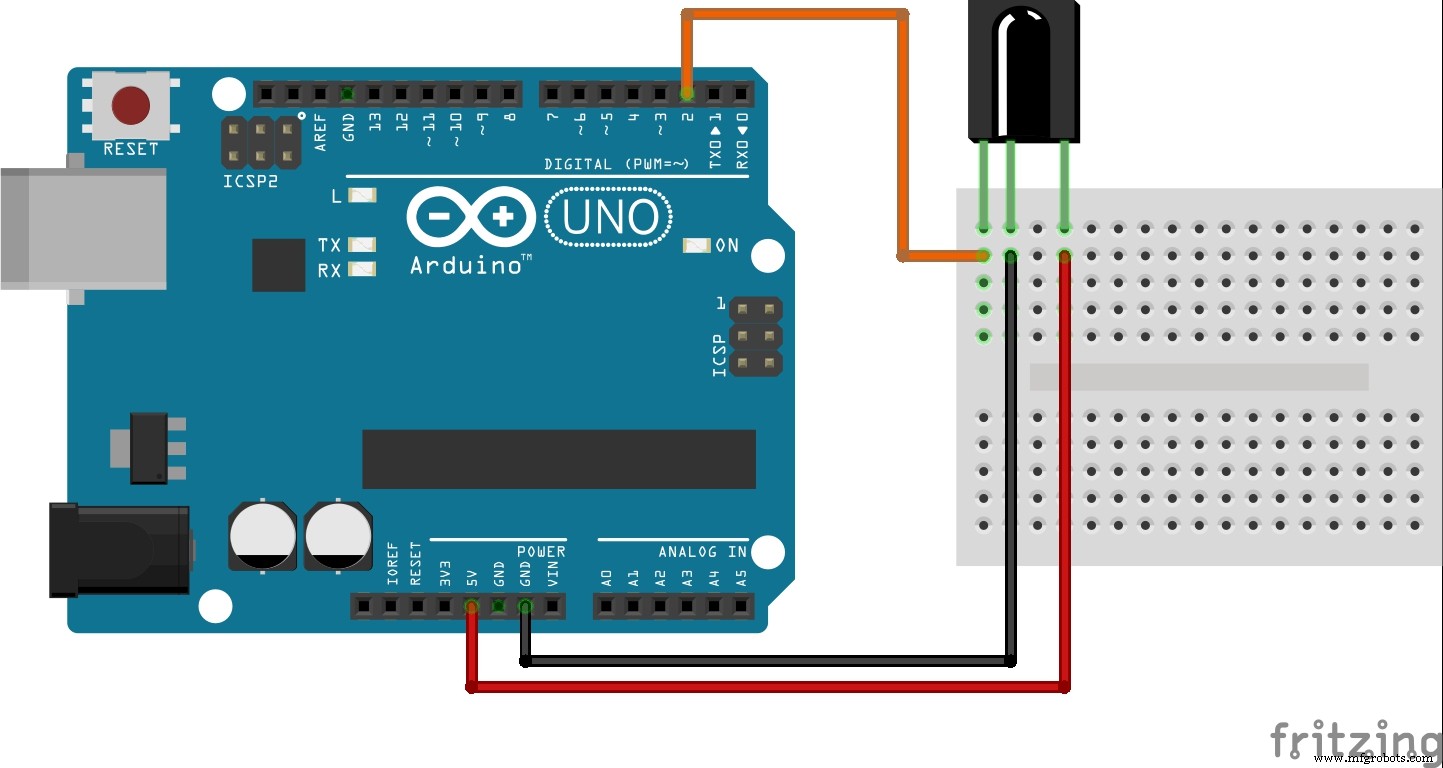 Usando 4 sensores infrarrojos, conectados en cadena junto con un circuito integrado simple de compuerta AND (74HCT21), un tanque puede para identificar las señales infrarrojas del LED del tanque opuesto como impactos de 360 grados a su alrededor.
Usando 4 sensores infrarrojos, conectados en cadena junto con un circuito integrado simple de compuerta AND (74HCT21), un tanque puede para identificar las señales infrarrojas del LED del tanque opuesto como impactos de 360 grados a su alrededor. 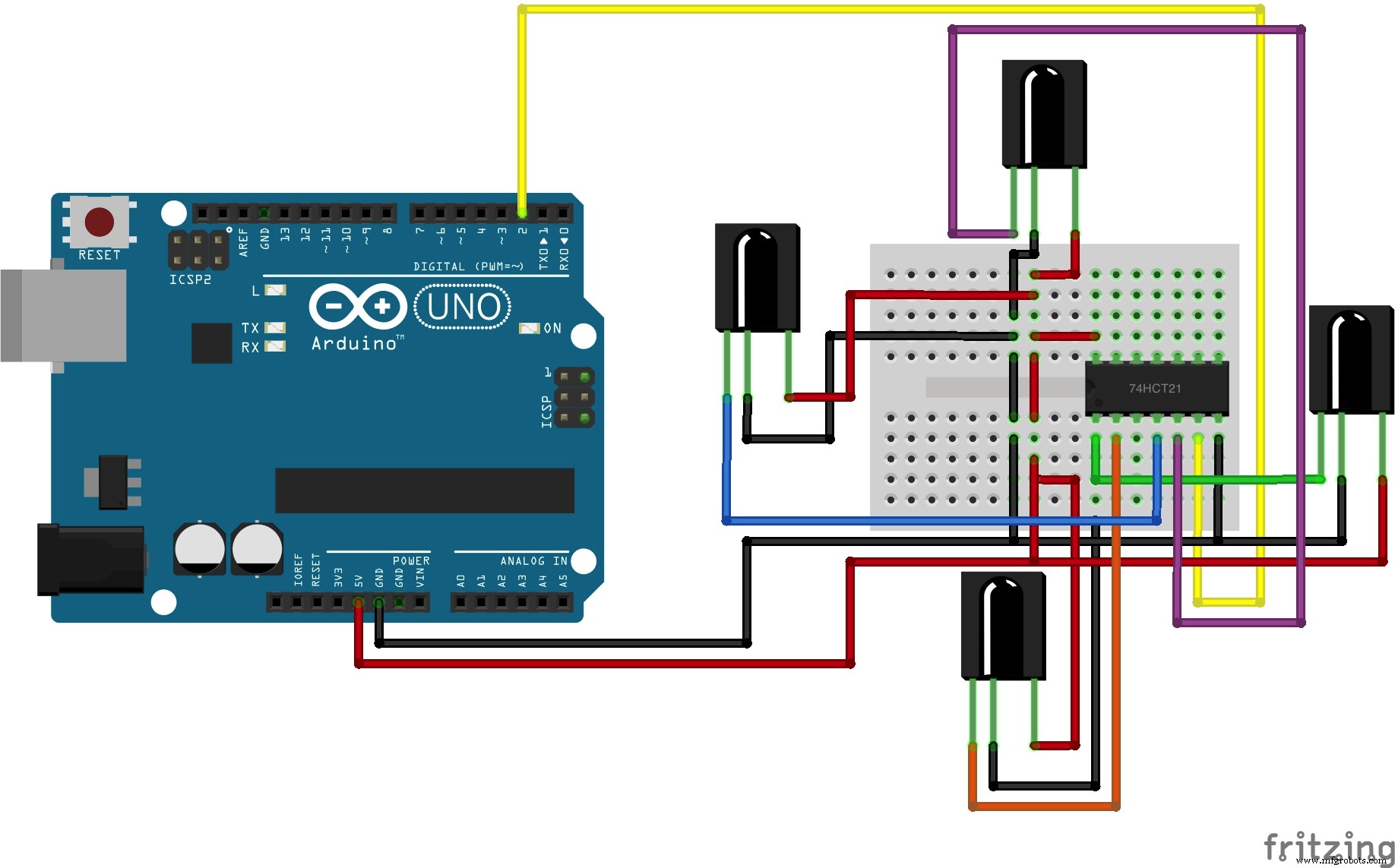 Usando un LED RGB, el tanque identifica su estado actual (cuántos golpes ha recibido) cambiando el color del LED. Además, el tanque cambia el color del LED a verde para cada disparo que dispara.
Usando un LED RGB, el tanque identifica su estado actual (cuántos golpes ha recibido) cambiando el color del LED. Además, el tanque cambia el color del LED a verde para cada disparo que dispara. 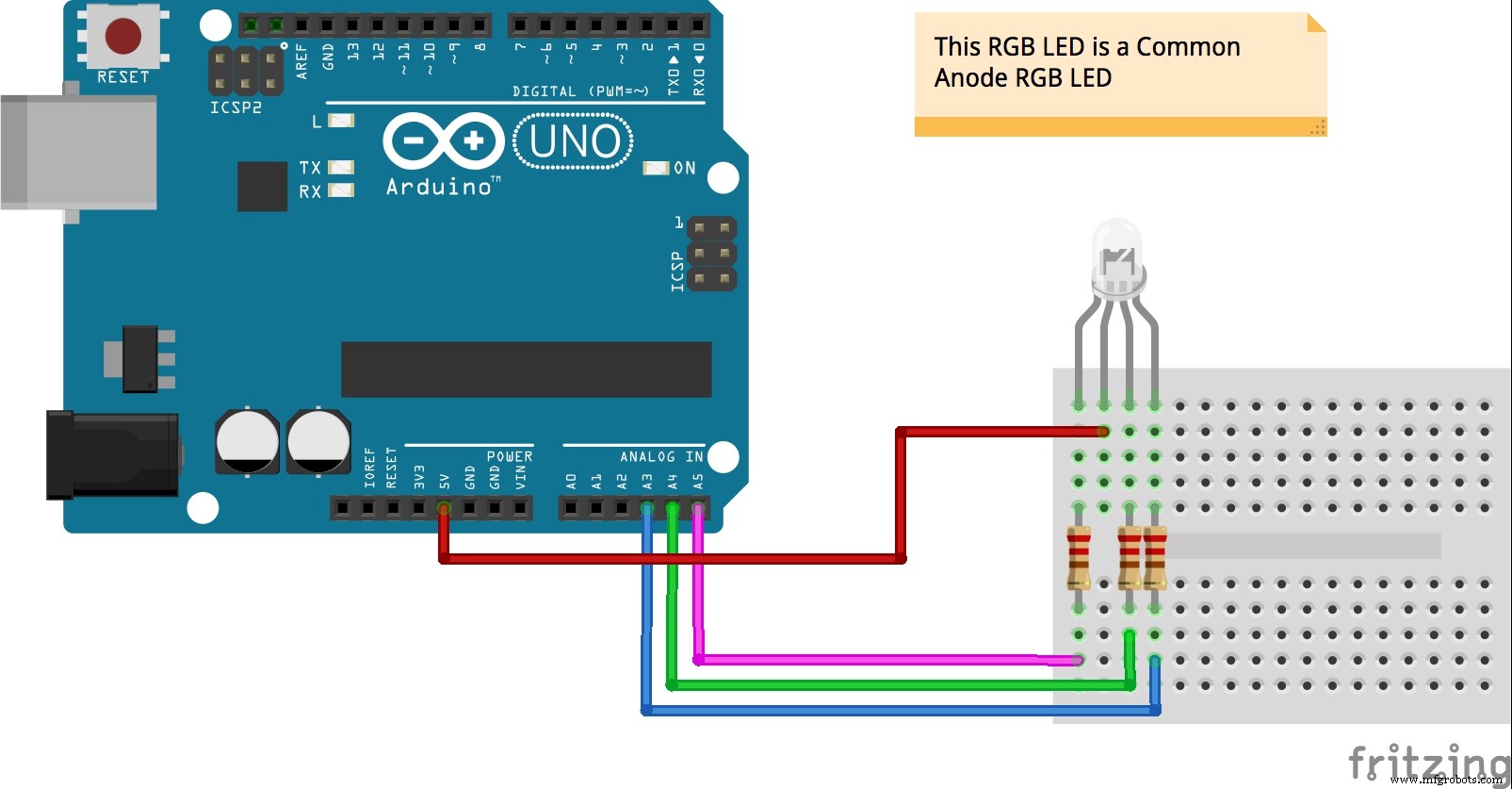 Con un circuito integrado L293D y algunos motores de CC simples, el tanque puede moverse hacia adelante, hacia atrás y girar izquierda o derecha.
Con un circuito integrado L293D y algunos motores de CC simples, el tanque puede moverse hacia adelante, hacia atrás y girar izquierda o derecha. 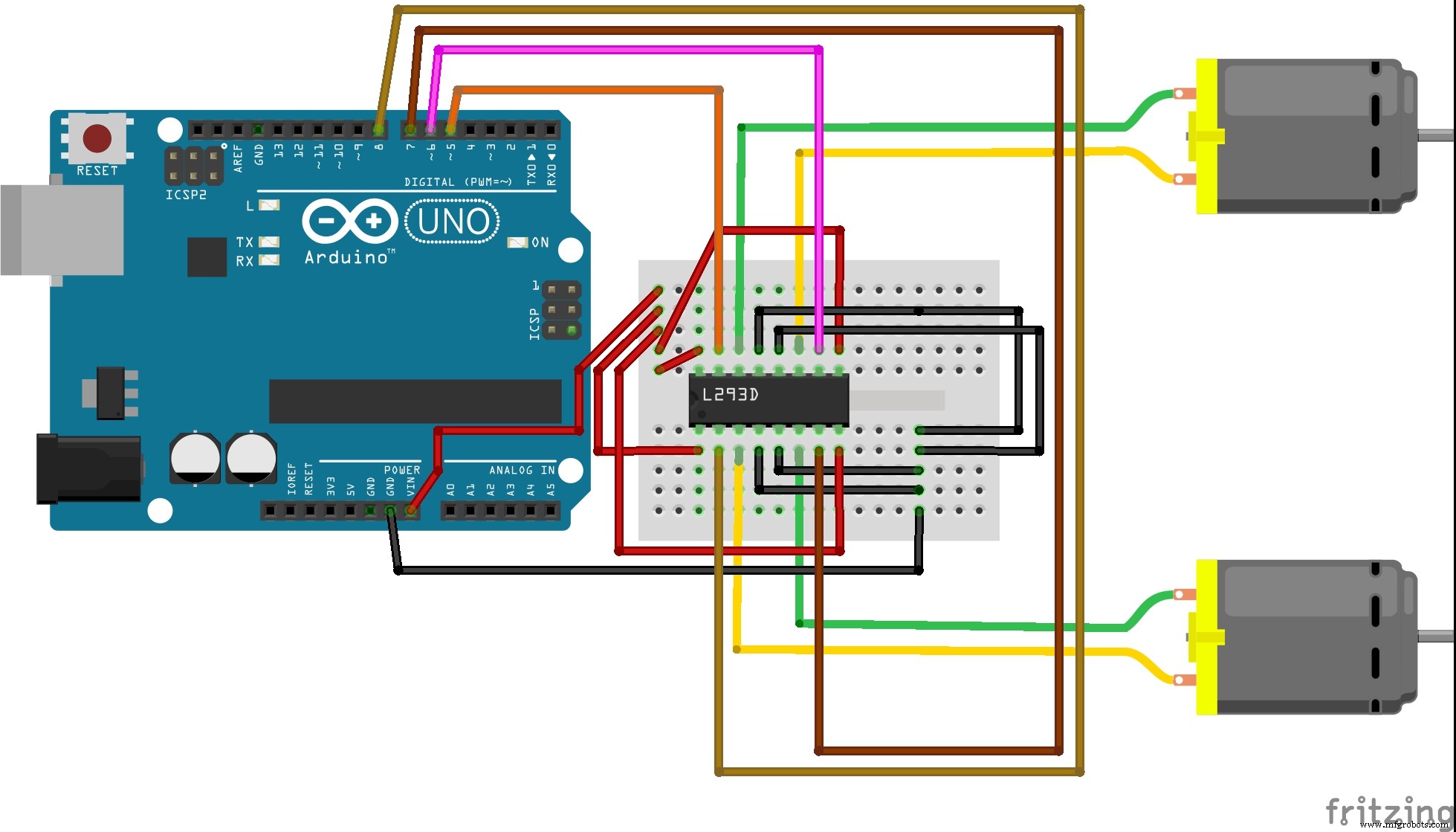 Con un transceptor RF24 simple y económico, el tanque puede comunicarse y recibir comandos del operador.
Con un transceptor RF24 simple y económico, el tanque puede comunicarse y recibir comandos del operador. 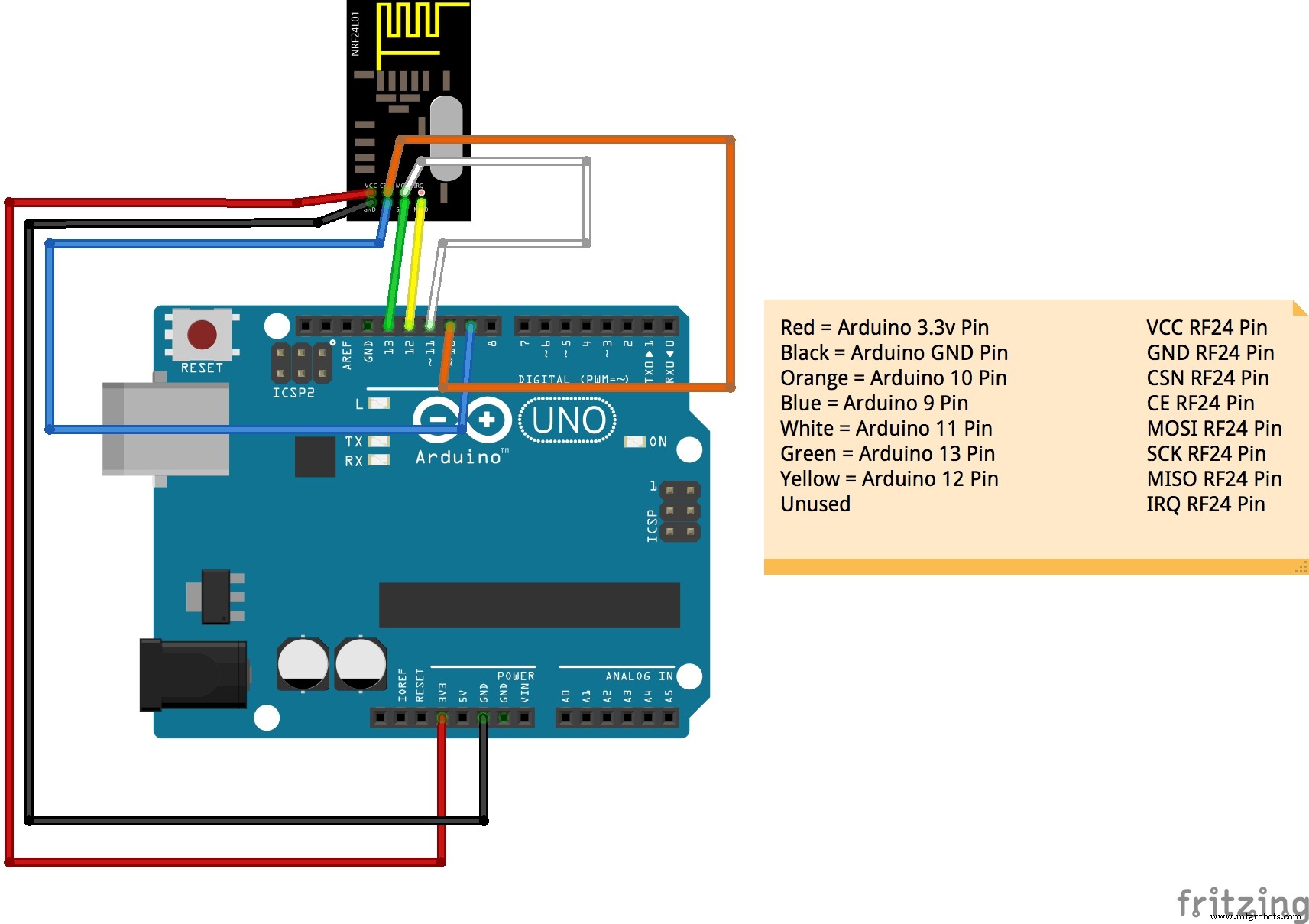 Usando una Raspberry Pi2, un transceptor RF24 simple y económico, y Node JS, el operador puede comunicarse con cada tanque a través de llamadas a la API REST.
Usando una Raspberry Pi2, un transceptor RF24 simple y económico, y Node JS, el operador puede comunicarse con cada tanque a través de llamadas a la API REST. 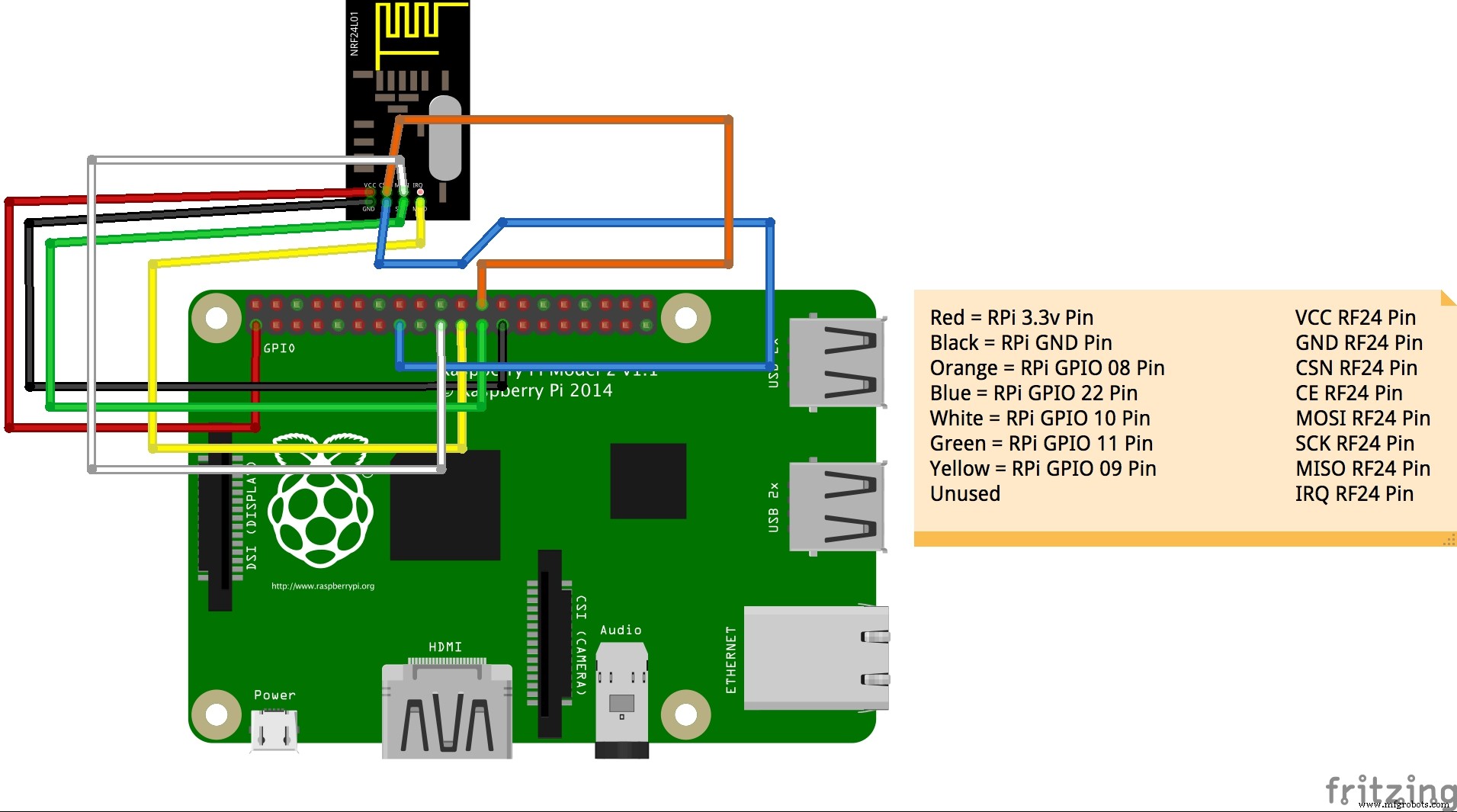
Proceso de manufactura
- Guía para el marcado láser de aluminio
- Guía de marcado láser
- ¿Qué es el marcado láser de fibra?
- Puntero láser
- Láser semiconductor
- Láser de estado sólido
- Circuito integrado
- Sistema de sensor de movimiento por infrarrojos de bricolaje para Raspberry Pi
- Sensor de movimiento con Raspberry Pi
- MOSMusic
- Tres componentes principales de la máquina de marcado láser