


Arduino Laser Tripwire
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Construcción de un cable trampa láser
Componentes
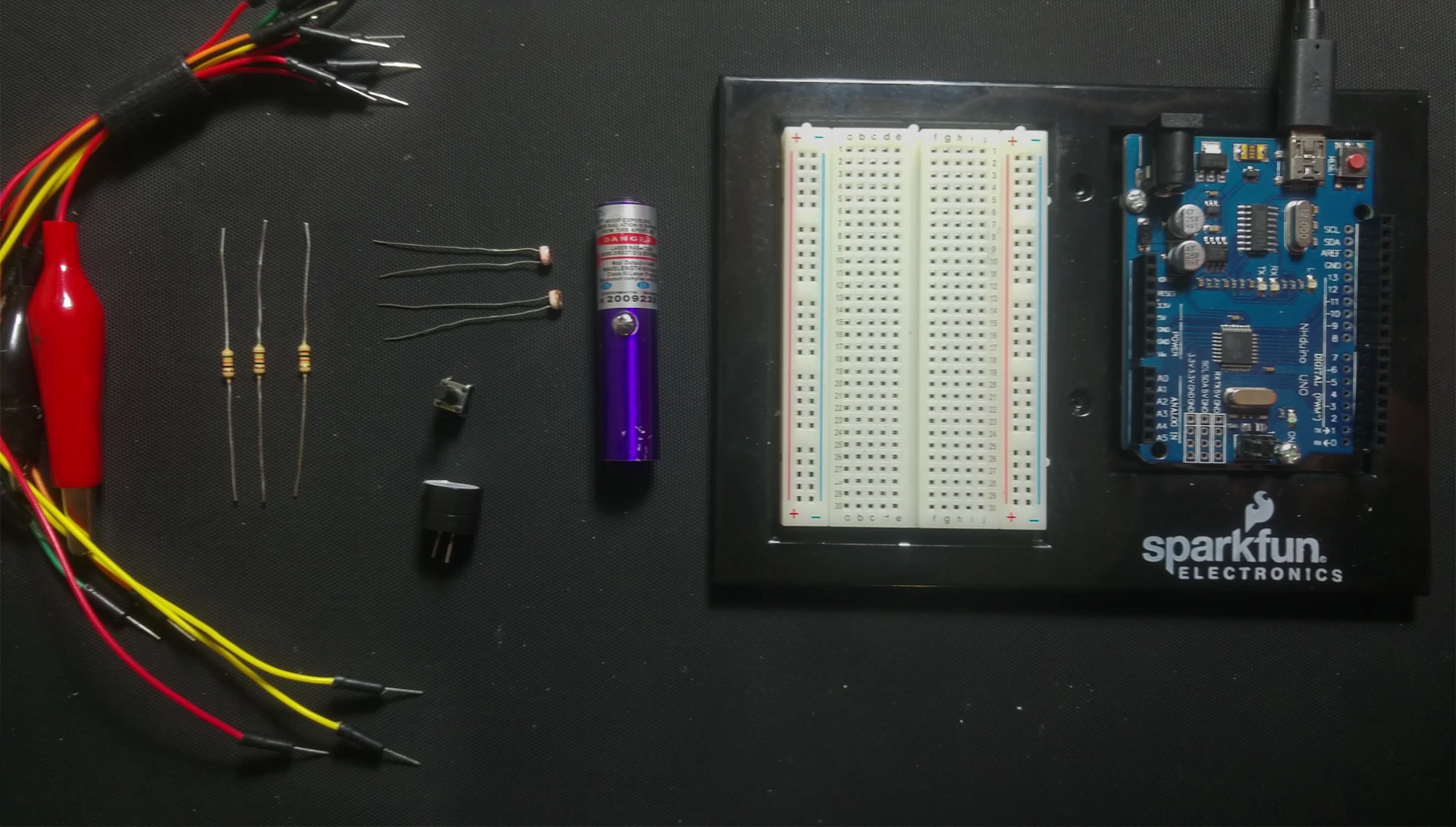
Necesitaremos lo siguiente:
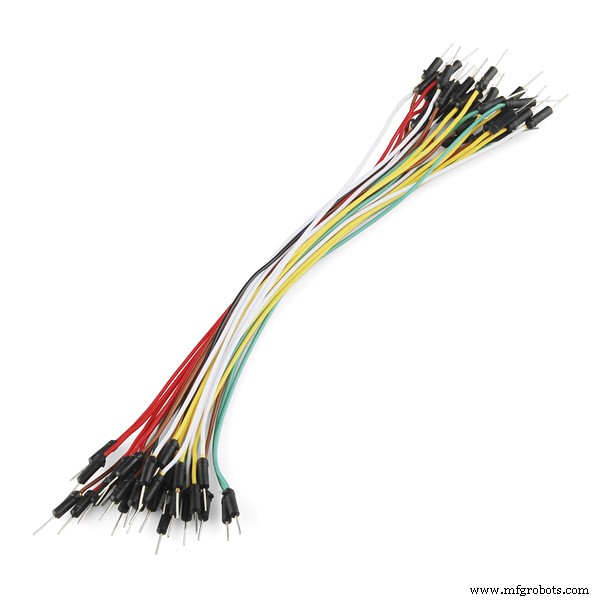
- Algunos cables de puente
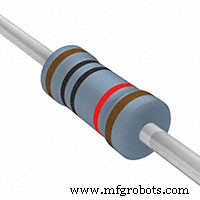
- 3 resistencias de 10k
- 2 x foto resistencias
- Un botón
- Un timbre
- Un láser
- Un Arduino
- Una placa de pruebas
- y un espejo
También he usado una placa de pruebas separada para el circuito de detección láser. (Esto ayudó mucho a colocar el láser en la fotorresistencia).
Haz el detector láser
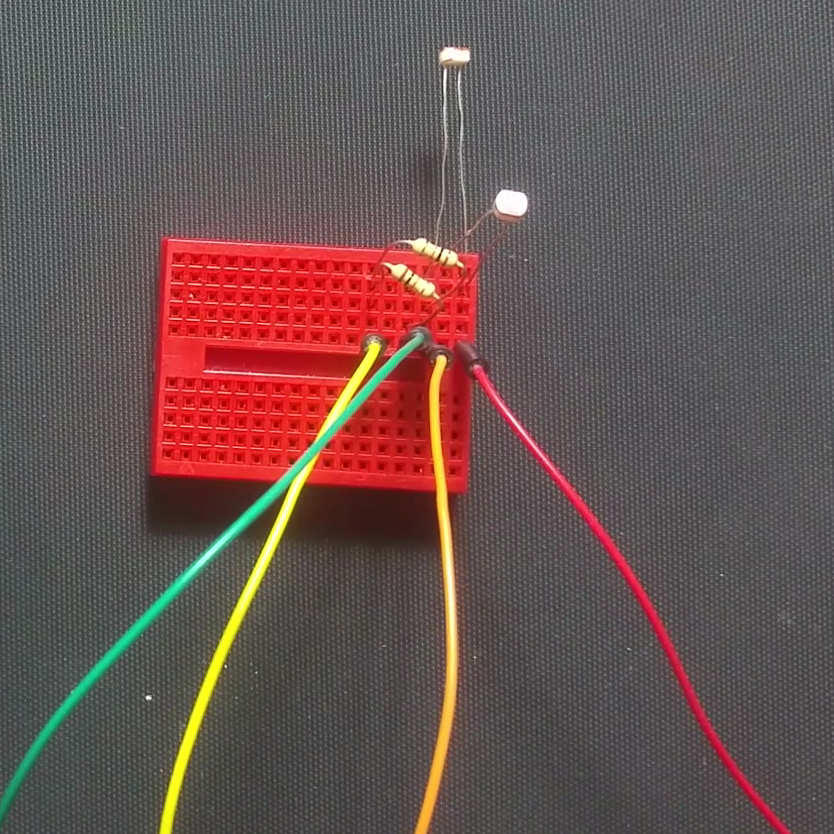
Comenzaré con la sección de detección de láser del circuito.
Coge dos cables de puente al principio. Tengo uno rojo y uno amarillo. Coloque los dos cables de puente en 2 regletas de terminales separadas. Tome una resistencia de foto y conéctela al cable rojo y una regleta de terminales. Coloque la otra fotorresistencia entre una regleta de terminales diferente y el cable rojo. Conecte una resistencia de 10k desde el cable amarillo a una de las fotorresistencias y la otra resistencia de 10K entre la otra fotorresistencia y el cable amarillo. Tome dos cables más y conéctelos a cada intersección de las resistencias fotográficas y las resistencias de 10k. Usé cables de puente verde y naranja.
Conecte el cable amarillo al negativo de la placa de pruebas y el rojo al positivo de la placa de pruebas. Conecta la naranja a A0 (la fotorresistencia conectada a este será el detector láser) y la verde a A1 (la fotorresistencia conectada a este será el detector de luz ambiental).
Hagamos lo siguiente
Coloque el timbre en cualquier lugar de la placa de pruebas. Conecte un cable entre el riel negativo y el negativo del zumbador. Conecte el extremo positivo del zumbador al pin 3 del Arduino.

Haz el botón
A continuación, vamos a crear la sección de botones
Coloque el botón entre 2 regletas de terminales (asegúrese de que haya contacto solo cuando se presione el botón entre las 2 regletas). Coloque la última resistencia de 10k en un extremo del botón y un pin negativo. He usado un cable de puente para conectarlo al riel de tierra. Conecte el otro extremo del botón al riel positivo. Luego, conecta la intersección del botón y la resistencia al pin 4 del Arduino.
¡Hora de la luz láser!
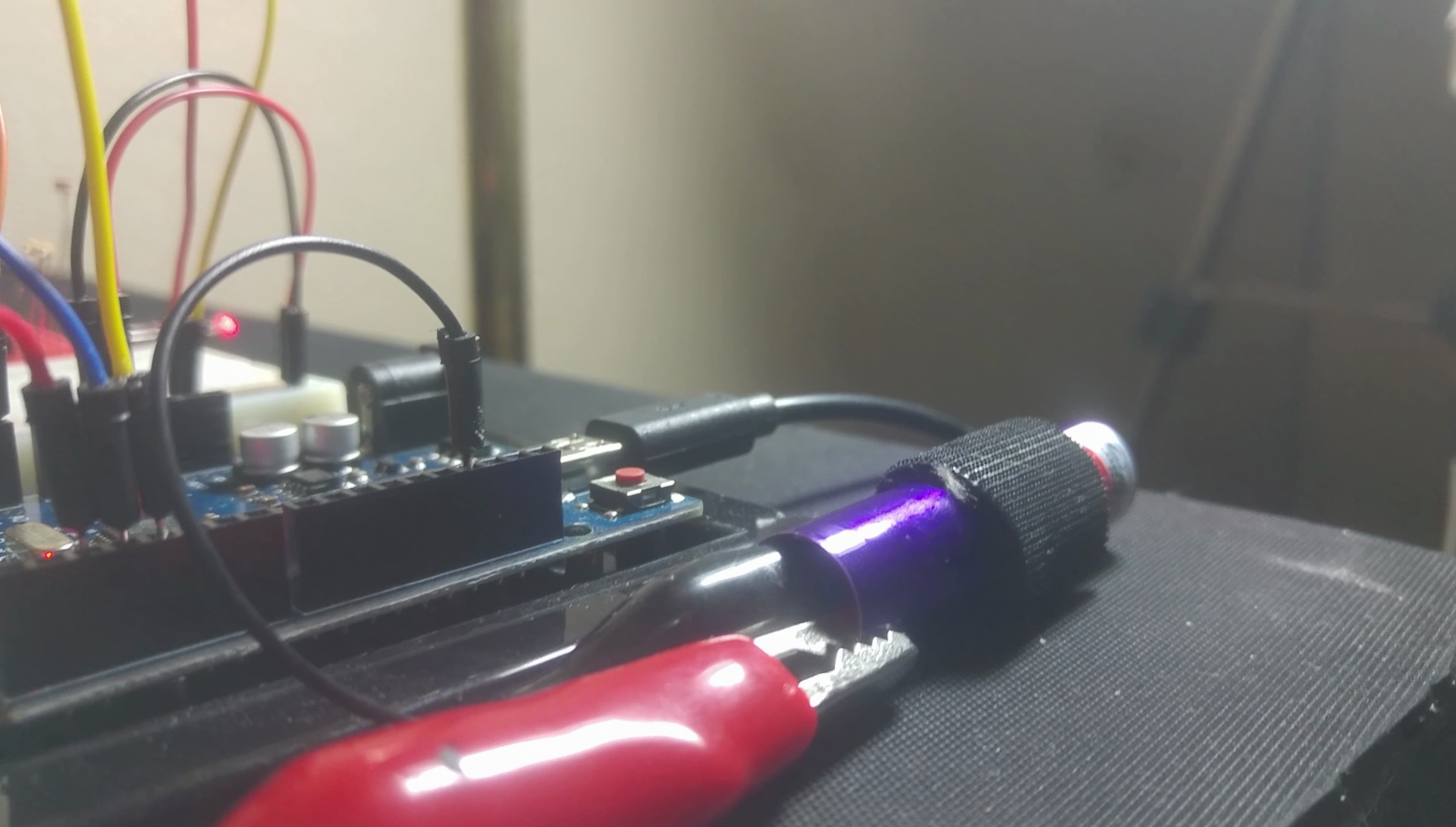
Por último, conectemos el láser al pin 2 y a tierra. He usado los pines del Arduino para ambos. Usé un láser barato que "pirateé" conectando pinzas de cocodrilo al resorte y la carcasa con un poco de velcro manteniendo presionado el botón.
Escribí un programa para ejecutar Laser Trip Wire.
Verifica continuamente para ver si el botón está presionado. Si se presiona ingresamos al modo setup, si se presiona nuevamente ingresamos al modo armado.
Si estamos en modo de configuración, hace lo siguiente:
- Envía los valores al puerto serie.
- Cuando la luz de la fotorresistencia es lo suficientemente brillante, el pin 13 se enciende. Esta característica permite apuntar el láser.
En el modo armado hace lo siguiente:
- Cada 3 segundos informa a través de comunicaciones en serie.
- Verifica si el valor de la fotorresistencia cae debido a que el láser se rompe, cuando el rayo láser se rompe, se inicia el modo Disparo.
En el modo de viaje, el cable trampa se ha "disparado":
- Suena 3 pitidos y los datos se envían al puerto serie,
- luego regresa al modo armado.
Código
- Cable trampa láser
Laser Tripwire Arduino
// Cable de disparo de 5 pines // Variablesint mode =1; int ambiant; int trip =1000; // El valor de luz que obtengo cuando uso mi laserint minLight =900; int makeBeep =1; // 0 para ningún pitido, 1 para pitido! Int atAverage; long millisCount; // Output Pinsint laserPin =2; int ledPin =13; int buzzerPin =3; String modeNames [3] ={"SETTINGS", "ARMED", "TRIP"}; // Entrada Pinsint modePin =4; int tripPin =A0; int ambiantPin =A1; void setup () {pinMode (ledPin, OUTPUT); pinMode (laserPin, SALIDA); pinMode (buzzerPin, SALIDA); pinMode (modePin, ENTRADA); Serial.begin (9600);} void loop () {// Cuando se presiona el botón if (digitalRead (modePin) ==1) {trip =analogRead (tripPin); modo =modo + 1; if (modo> =2) {modo =0; } pitido (1); retraso (300); } // hace algo cuando el modo cambia switch (mode) {caso 0:// modo de calibración digitalWrite (laserPin, HIGH); ambiant =analogRead (ambiantPin); viaje =analogRead (tripPin); atAverage =ambiant + ((viaje - ambiant) / 2); stats (); if (viaje> =minLight) {digitalWrite (ledPin, HIGH); } else {digitalWrite (ledPin, LOW); } descanso; caso 1:// Modo armado digitalWrite (laserPin, HIGH); digitalWrite (ledPin, BAJO); ambiant =analogRead (ambiantPin); atAverage =ambiant + ((viaje - ambiant) / 2); if (analogRead (tripPin) =3000) {millisCount =millis (); stats (); } descanso; caso 2:// Modo de viaje if ((millis () - millisCount)> =1000) {millisCount =millis (); stats (); bip (3); modo =1; } descanso; } retraso (1); // espere un poco} // Es bip evite el bip (int qty) {int count; if (makeBeep ==1) {for (count =1; count <=qty; count ++) {digitalWrite (buzzerPin, HIGH); retraso (50); digitalWrite (buzzerPin, BAJO); retraso (50); }}} // Escribe estadísticas en Serial Portvoid stats () {Serial.print ("A:"); Serial.print (ambiant); Serial.print ("T:"); Serial.print (viaje); Serial.print ("AT:"); Serial.print (en promedio); Serial.print ("MODO:"); Serial.print (modeNames [modo]); Serial.println ("");} Esquemas
Vista de tablero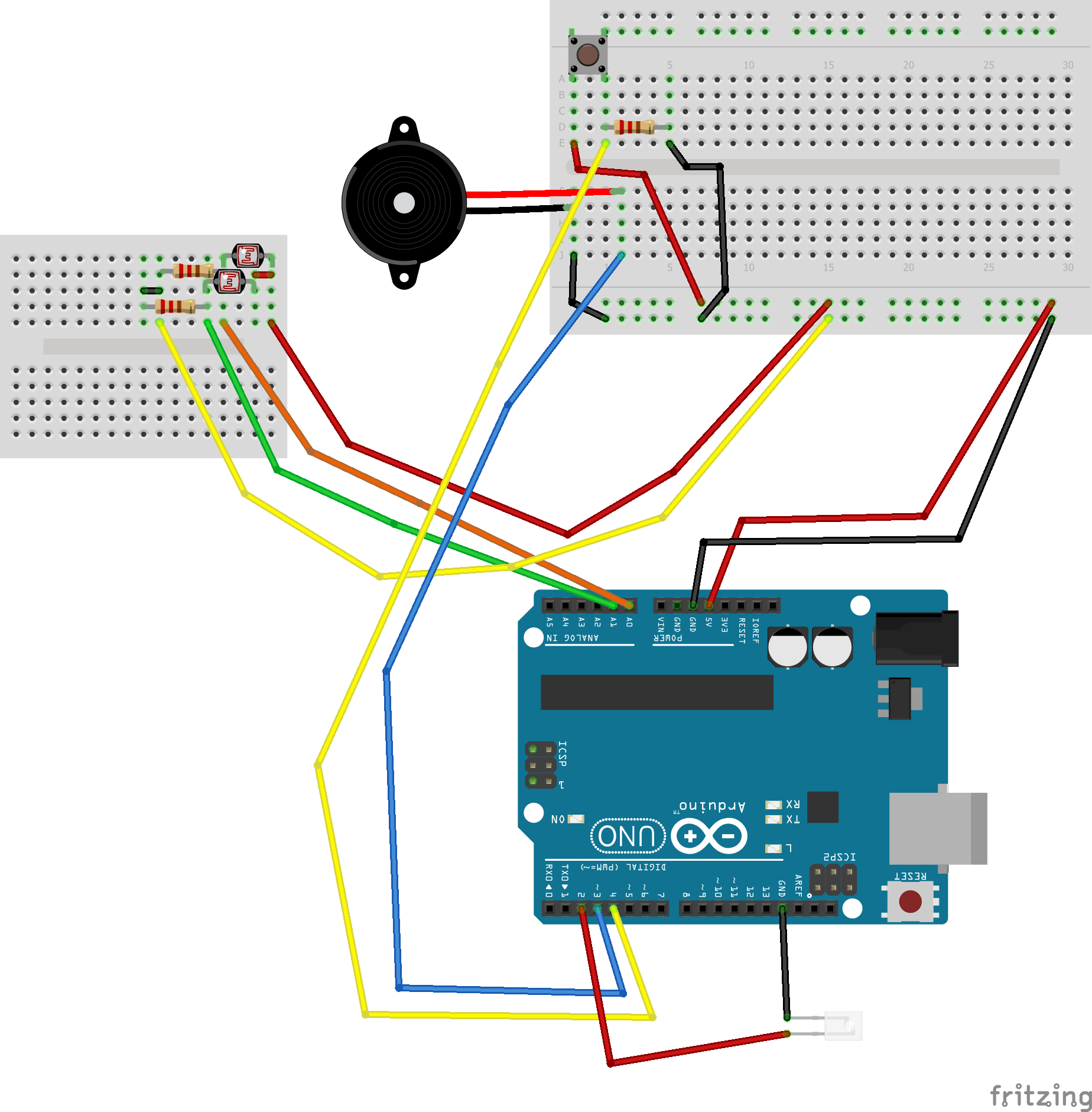 Vista esquemática
Vista esquemática 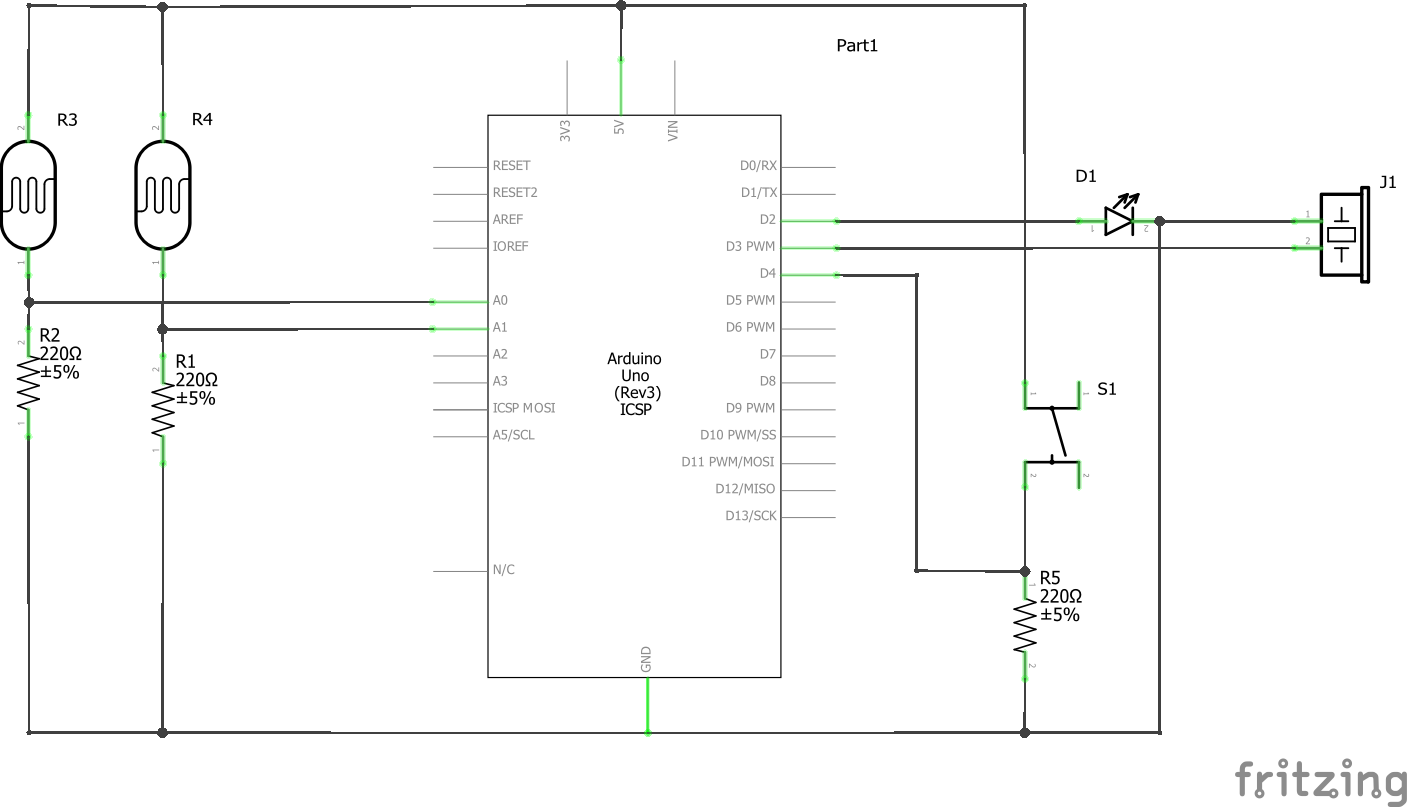
Proceso de manufactura
- Construcción de Squid Games Doll usando Arduino UNO
- Reloj Arduino con tiempos de oración islámicos
- Sistema de robótica de detección humana con Arduino Uno
- WebServerBlink usando Arduino Uno WiFi
- Calculadora UNO simple
- ¡Visualización de una imagen en una pantalla LCD TFT con Arduino UNO!
- Persistencia de la visión
- Controlar una matriz de LED con Arduino Uno
- Wi-Servo:Servomotores Wi-Fi controlados por navegador
- Arduino Uno + Dispositivo eléctrico (bombilla) + Teléfono Android
- Control de ventilador PWM de 4 pines y 25 kHz con Arduino Uno