


Error feo
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Antecedentes
Aquí hay un pequeño robot rápido y fácil que se puede construir y ensamblar en aproximadamente media hora con las herramientas y piezas adecuadas.
Yo no lo inventé. Vi un video de algo como esto en YouTube y pensé 'Oye, parece divertido, construiré uno'.
Así que saqué algunos servos de mi caja de basura, una vieja batería de teléfono móvil que había guardado con la esperanza de encontrar algo genial que hacer con él, un Arduino Pro 3.3v que había comprado por capricho porque necesitaba alcanzar la cuota de entrega gratuita y se puso manos a la obra.
Una hora más tarde, ¡aquí estaba!
Ensamblaje
Empecemos por el montaje básico.
Corta el brazo de montaje que está opuesto al lado donde salen los cables en uno de los servos (este será tu servo trasero). El servo trasero apunta hacia abajo y el otro hacia adelante. Puede usar glu o bridas para mantenerlos juntos.

Luego, enganche un cable rojo y uno negro al positivo y negativo de la batería de su teléfono celular (los mantuve en su lugar con cinta de electricista). Si tiene una batería de iones de litio, entonces no tiene que luchar con eso :)
Luego pegué la mini placa a la batería. No tienes que hacerlo, por supuesto. Depende de si planea reutilizar alguna vez las partes de este robot o no.
Ate con cables la batería y la placa de pruebas al conector del servo.
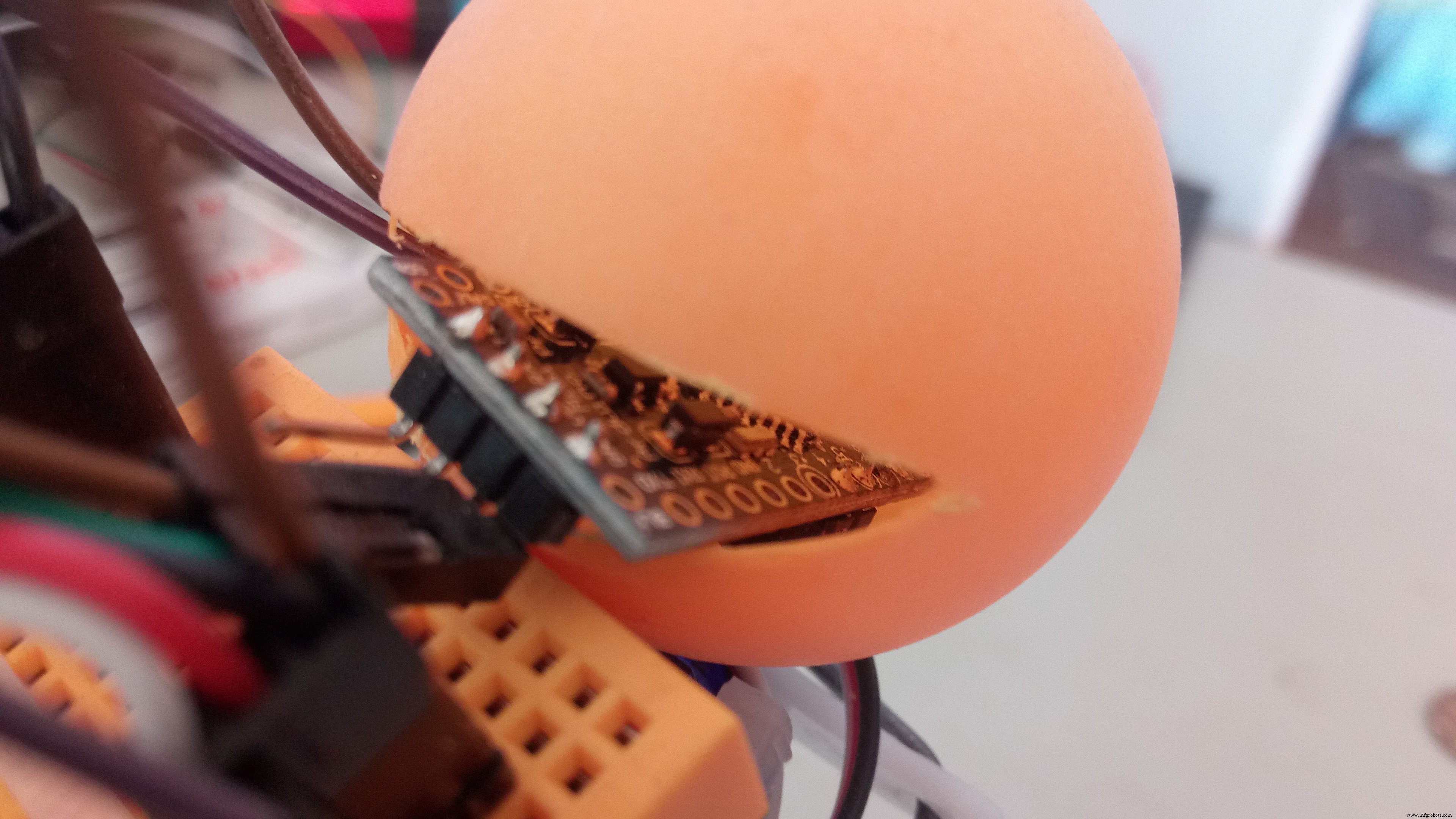
Corta una cuña en la pelota de ping pong. Suena fácil, ¿verdad? :) ¡Es posiblemente el paso más difícil de todo este tutorial! Una pelota de ping pong es notablemente sólida y también ... redonda. Cortar las cosas requiere paciencia. Y llevar gafas !!! No importa qué dispositivo uses para cortarlo. El plástico (o cualquier material extraño del que esté hecha la mía) se astilla mucho. Entonces gafas ! ¡Quiero que aún puedas leer el resto de este tutorial después de que hayas terminado de cortar!
Compruebe que su Arduino encaja bien en el orificio. Y luego pegue la pelota de ping pong al resto del animal.
Para las piernas, te dejo a tu suerte. La mía era una simple pieza de alambre de acero de 1 mm de grosor que se dobla dentro y alrededor del montaje del ala de los servos (como en la imagen). Al final de cada pata, coloqué un pie pequeño cortado de una barra de pistola de pegamento para agarrarlo.
Simplemente calienta el cable con un encendedor y colócalo en tu pie improvisado. el pegamento se derretirá al contacto y volverá a solidificarse muy rápido.
Antes de unir las patas al resto del monstruo, necesitarás hacer los circuitos y cargar el boceto en el tablero. Deberá leer más sobre esto si no sabe cómo cargar un boceto en el Arduino Pro Mini. https://www.arduino.cc/en/Guide/ArduinoProMini
El código para este es extremadamente simple, así que no voy a repasarlo.
Tiene un retraso de 5 segundos al final de la configuración, por lo que tiene tiempo de desconectar su Arduino antes de que las patas comiencen a moverse, pero después de centrarlas.
Ahora puede colocar sus piernas y atornillarlas en su lugar.
Una vez que las patas estén atornilladas en su lugar, incluso puede optar por editar el programa y acortar (o eliminar) el retraso en la línea 13.
Demostración
Si todo salió bien, ahora debería tener un chico lindo que se vea un poco así:
¡Y mira el video de Triceratops de ClaudioGasp en los comentarios! ¡Es asombroso!
Código
- Error
Error Arduino
#includeint FRONT =4; int BACK =5; Servo frontLegs, backLegs; void setup () {pinMode (13, OUTPUT); // Esto es solo para el bonito frontLegs.attach (FRONT); backLegs.attach (VOLVER); frontLegs.write (90); // Centra el servo backLegs.write (90); // Centrar el retardo del servo (5000); // Espere 5 segundos (Esto nos da tiempo para desconectar el arduino // para que podamos fijar las patas.} Void loop () {digitalWrite (13, HIGH); // LED en delay (200); frontLegs.write (70 ); // mover la pata delantera un poco de retraso (200); backLegs.write (70); // mover la pata trasera un poco digitalWrite (13, LOW); // LED apagado retraso (200); frontLegs.write (110); // mueve la pierna delantera un poco de retraso (200); backLegs.write (110); // mueve la pierna hacia atrás un poco}
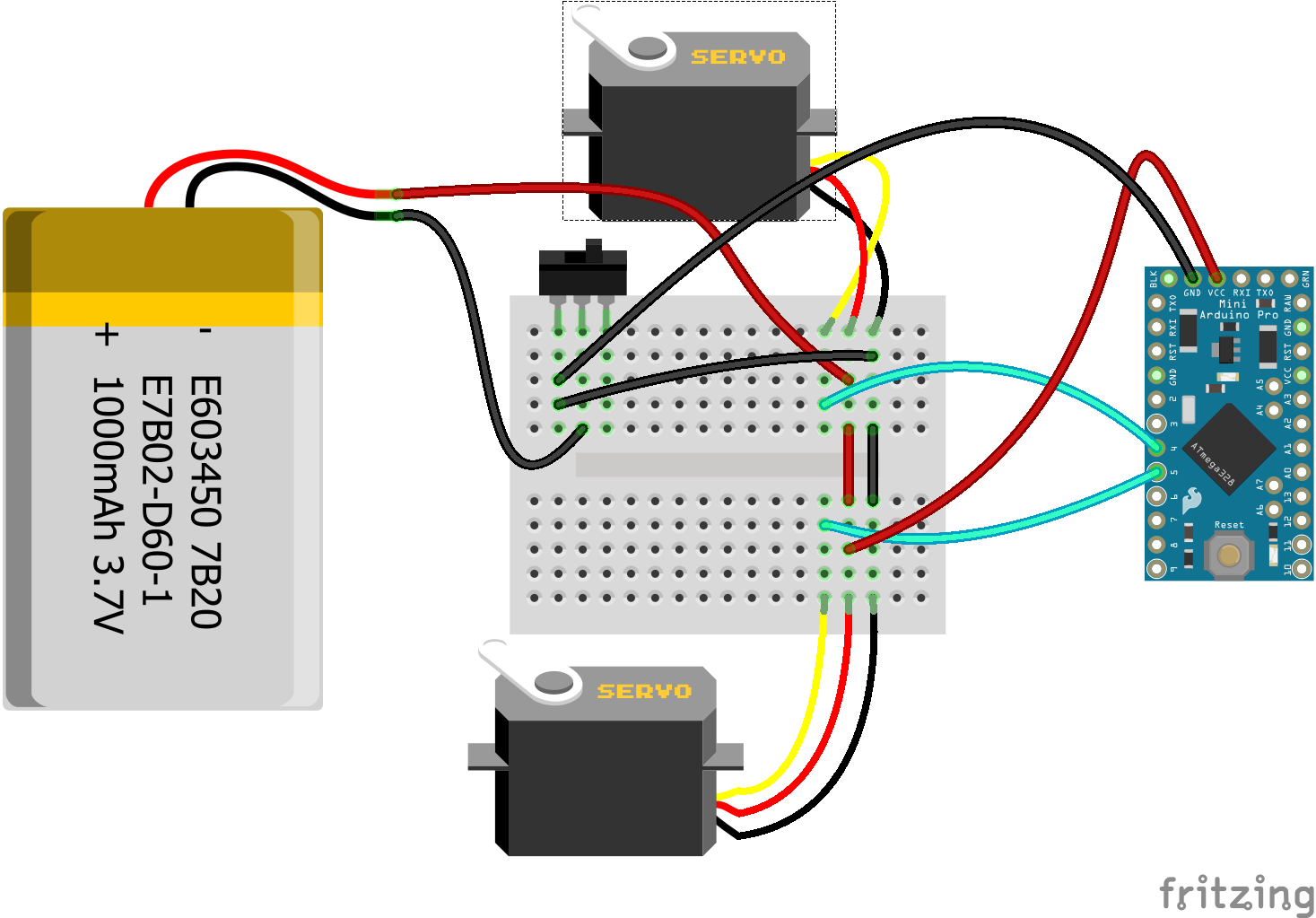
Esquemas
bug_Yr3jFYFuNQ.fzzProceso de manufactura
- Componentes del circuito
- Circuito integrado
- Dados digitales Arduino
- Sensor de temperatura múltiple
- Controlador de juego Arduino
- MotionSense
- Seguridad contra incendios de la impresora 3D
- MOSMusic
- ¿Qué es la microelectrónica?
- Componentes de la máquina de perforación
- Componentes del motor de combustión interna