


Motorización de IoT con motores paso a paso a batería
Este artículo analiza cómo funcionan bien los motores paso a paso en tareas orientadas a IoT, como colocar cámaras de seguridad y sensores remotos o accionar salidas de aire, válvulas y ventanas cubiertas.
Los objetos inteligentes habilitados por sensores ya están desempeñando un papel vital como los "ojos y oídos" del IoT. Pero, hasta hace poco, ha habido pocas soluciones prácticas para dar a las aplicaciones de IoT "brazos y manos" prácticos y asequibles que puedan llegar a través de Internet y reaccionar a lo que ven o sienten de manera física. Sin embargo, esto está cambiando con la aparición de controladores electrónicos rentables con capacidad para IoT que pueden usar pequeños paquetes de baterías para impulsar motores, motores paso a paso, solenoides y otros tipos de actuadores que traducen la intención virtual del mundo cibernético en acciones del mundo real. .
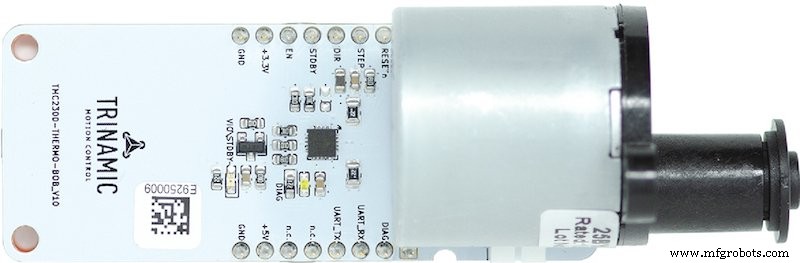
Figura 1a. Los motores paso a paso están encontrando un número creciente de aplicaciones de IoT, como este controlador de radiador activado de forma remota.
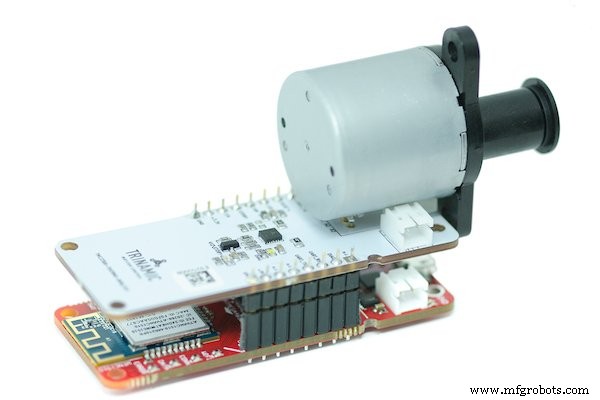
Figura 1b. Se muestra el controlador del radiador con una placa de desarrollo Microchip AVR IoT.
En este artículo, nos centraremos en los motores paso a paso porque sus estructuras de rotor y armadura segmentadas les permiten rotar en pasos pequeños, precisos y discretos y mantener su posición sin energía. Esto los hace funcionar bien en tareas orientadas a IoT, como colocar cámaras de seguridad y sensores remotos o accionar salidas de aire, válvulas y cubiertas de ventanas.
Trabajar con una fuente de energía limitada
Si bien algunos dispositivos IoT motorizados se alimentan por línea, ahora se requiere un número creciente de aplicaciones para operar en ubicaciones remotas, a menudo utilizando fuentes de energía relativamente pequeñas y de bajo voltaje, como una sola celda de iones de litio o una batería AA o AAA. En el caso de muchas aplicaciones de IoT en el hogar y la oficina, se supone que estas aplicaciones se integran en el entorno, lo que significa que no pueden tener un cable de alimentación.
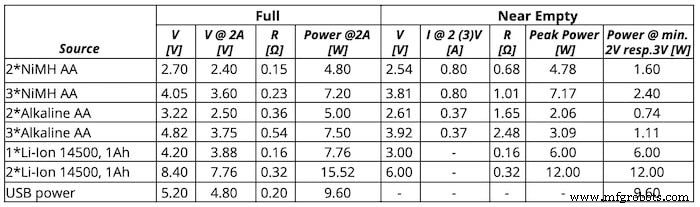
En teoría, la energía de la batería funcionará para muchas de estas aplicaciones porque usan el motor con poca frecuencia, por lo que su impacto en la capacidad limitada de la batería es relativamente bajo. Pero es posible que la batería no pueda proporcionar el voltaje de accionamiento más alto y los pulsos de corriente relativamente grandes que requiere un motor paso a paso para energizar sus bobinas. Como muestra la Tabla 1, las baterías más comúnmente disponibles tienen una cantidad significativa de resistencia interna que reduce su voltaje de salida a medida que aumenta su corriente de salida.
Tabla 1. Características de las baterías pequeñas
Afortunadamente, existen algunas estrategias simples para superar estas limitaciones, incluido el almacenamiento en búfer de suministro, los convertidores step-up y los steppers personalizados. Veamos cómo funciona cada una de estas estrategias.
Almacenamiento en búfer
Se puede utilizar una técnica simple conocida como "almacenamiento en búfer de suministro" para complementar la salida limitada de una batería pequeña agregando un supercondensador que puede entregar un pulso corto de alta corriente.
El tamaño del supercondensador se puede calcular mediante la fórmula:
C =dU * I / t
Dónde:
dU =la caída de voltaje interna máxima permitida de la batería,
yo =la corriente necesaria para complementar la salida de la batería, y
t =tiempo de funcionamiento deseado
En la actualidad, los supercondensadores toleran un voltaje de funcionamiento máximo de solo 2,7 V y requieren un circuito de protección si el voltaje de suministro puede exceder este valor. Cuando se requieren voltajes más altos, se pueden colocar dos o más supercondensadores en serie, pero el circuito debe incluir un diodo Zener o algún otro dispositivo para equilibrar los voltajes (Figura 2).
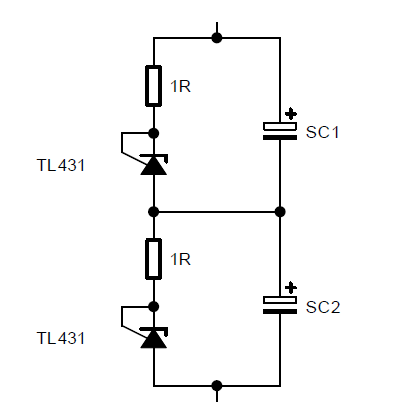
Figura 2. Un circuito de equilibrio de supercondensador con protección contra sobretensión Zener (2,5 V).
Los supercondensadores adecuados para este tipo de aplicaciones ahora están ampliamente disponibles en muchos fabricantes de componentes, incluidos Maxwell, Skeleton y Vishay.
Convertidores progresivos
Algunos circuitos integrados, incluidos muchos controladores de motor populares, tienen dificultades para funcionar con los bajos voltajes disponibles en los paquetes de baterías pequeños, especialmente cuando están cerca del final de su vida útil. Los convertidores elevadores son circuitos integrados de bajo costo que se pueden usar para aumentar el voltaje de una batería hasta tres o cuatro veces y para mantener el voltaje de suministro de su sistema a un nivel uniforme hacia el final de la vida útil de la batería. Estos convertidores son muy eficientes (90% -95%) con cargas elevadas, pero su eficiencia cae algo cuando se cargan con poca carga. Se pueden utilizar como solución independiente o junto con un supercondensador.
Los fabricantes de circuitos integrados que producen convertidores elevadores incluyen Analog Devices, Maxim Integrated y Texas Instruments. Uno de los convertidores más utilizados para este tipo de aplicación es el MAX8969 de Maxim.
Steppers de herida personalizada
La mayoría de los motores paso a paso, incluso los pequeños, están diseñados para funcionar con voltajes que van de 5 V a 12 V, mientras que la mayoría de las pilas de baterías pequeñas producen de 1,5 V a 5 V. Para operar con estos voltajes más bajos, los motores paso a paso necesitan devanados con menos vueltas de cable más grueso y de menor resistencia. Afortunadamente, la mayoría de los fabricantes están configurados para aceptar pedidos personalizados por un cargo razonable o sin cargo.
Para pedir un motor de bobinado personalizado, deberá especificar una corriente de bobina (ICOIL), definida como la corriente del motor RMS, que da el par nominal en reposo. Para este tipo de aplicaciones, es bueno utilizar un motor que entregue el par necesario al 50% -70% de su corriente nominal máxima para minimizar las pérdidas resistivas y proporcionar cierto margen de maniobra.
El primer paso para especificar los devanados es utilizar las especificaciones originales del motor del fabricante para calcular la corriente necesaria para generar el par requerido para su aplicación. Utilice este valor para calcular el requisito de voltaje para el tipo de motor utilizando la fórmula siguiente.

Este cálculo para las condiciones de reposo también es razonablemente preciso para el funcionamiento a cámara lenta donde hay pocos campos electromagnéticos. A velocidades más altas, el CBEMF constante de back-EMF específico del motor también debe tenerse en cuenta mediante el uso de lo siguiente:

Esta fórmula utiliza el cociente del par de retención y la corriente de bobina asignada. Tenga en cuenta que en cualquier situación, reducir el RCOIL del motor paso a paso permite una UBAT más baja.
Si encuentra que el requisito de voltaje del paso a paso que ha seleccionado excede el voltaje disponible de su suministro, comuníquese con el fabricante del motor sobre una versión de bobinado personalizado que operará con un voltaje más bajo usando una corriente más alta.
Poniéndolo todo junto
Si está interesado en aprender más sobre las técnicas presentadas en este artículo, puede descargar la Nota de aplicación de Trinamic # 57, Cómo hacer un termostato con el TMC2300, donde se utilizan ejemplos prácticos para explorar muchos de estos temas con más profundidad.
La teoría detrás de estas técnicas se explica con mayor detalle en el documento Diseño de sistemas de control de motores de bajo voltaje para dispositivos IoT móviles e inalámbricos, que presenté en Embedded World 2020.
Recursos adicionales
- El taller de Inventables:conceptos básicos de motores paso a paso
- Elección del motor adecuado para su proyecto:CC frente a motores paso a paso frente a servomotores
- Conducir un motor paso a paso - Adafruit Industries
- Kit de evaluación TMC2300-THERMO-BOB (PDF)
- Hoja de datos:controlador paso a paso de bajo voltaje Trinamic TMC2300
Los artículos de la industria son una forma de contenido que permite a los socios de la industria compartir noticias, mensajes y tecnología útiles con los lectores de All About Circuits de una manera que el contenido editorial no es adecuado. Todos los artículos de la industria están sujetos a estrictas pautas editoriales con la intención de ofrecer a los lectores noticias útiles, experiencia técnica o historias. Los puntos de vista y las opiniones expresados en los artículos de la industria son los del socio y no necesariamente los de All About Circuits o sus redactores.
Tecnología de Internet de las cosas
- El potencial para integrar datos visuales con IoT
- En la carretera con IoT
- Los secretos de una infraestructura de IoT con una ciudad inteligente
- Las aplicaciones de la vida real de IoT y por qué la duración de la batería es fundamental
- Los servicios de conectividad bajo demanda satisfacen las necesidades de las aplicaciones de IoT
- IoT World:Un día en la vida con Vertica
- Con las ofertas de la plataforma IoT de Lumada, Hitachi conecta los puntos
- Con Enterprise IoT, lo mejor está por venir
- Descubra el valor de IoT con la supervisión del rendimiento
- Últimos avances y aplicaciones en la tecnología de IoT
- Redefiniendo la industria hotelera con Internet de las cosas