


Las 10 tareas principales para la programación sin conexión
¿Tu tarea es adecuada para la programación fuera de línea? Analizamos las 10 tareas robóticas principales que son posibles con el software de programación fuera de línea.
Una preocupación común sobre cualquier nueva tecnología está contenida en la pregunta "¿Pero funcionará para mi situación particular?"
La programación sin conexión no es diferente. Aunque las personas ven los beneficios con bastante rapidez, a veces les preocupa que no sea aplicable a su tarea específica. Entendemos su preocupación. El negocio de cada persona es único y puede ser difícil saber si una tecnología como la programación fuera de línea será la mejor opción para usted.
Sin embargo, aunque su situación es única, existen similitudes entre su aplicación de robot y otras que vemos todo el tiempo. La programación sin conexión se puede utilizar para muchas tareas robóticas.
En este artículo, explicamos qué factores determinan si puede usar la programación sin conexión y enumeramos nuestras 10 tareas principales en RoboDK.
Qué determina si una tarea puede usar la programación sin conexión
Si puede realizar una tarea con un robot, es casi seguro que puede programarla mediante la programación fuera de línea. Sin embargo, hay algunos factores que determinan qué tan fácil (o difícil) será llevar a cabo la programación.
Cinco factores importantes son:
- Funcionalidad del software: No todos los programas de programación fuera de línea son iguales. Algunos paquetes son proporcionados por fabricantes de robots particulares, por lo que están bloqueados en esas marcas y tienen un soporte variable para algunas tareas.
- Compatibilidad con robots: Algunos fabricantes no ofrecen software de programación fuera de línea, lo cual es un problema si confía en el software del fabricante. Para obtener consejos sobre cómo evaluar su robot, consulte nuestro artículo:¿Funcionará la programación fuera de línea con mi robot?
- Disponibilidad del modelo de robot — Debe asegurarse de que su modelo de robot esté disponible para el software de programación fuera de línea que está utilizando. Consulte nuestra biblioteca de robots para ver más de 300 modelos de más de 30 fabricantes de robots.
- Nivel de experiencia: Algunos tipos tradicionales de programación fuera de línea (por ejemplo, en la industria automotriz) involucran herramientas de software complejas que no son fáciles de usar. El software como RoboDK, por otro lado, hace que sea muy fácil programar su robot fuera de línea. Como resultado, necesita mucha menos experiencia de la que podría tener en el pasado.
La mayoría de estos factores se pueden superar seleccionando el software de programación fuera de línea adecuado.
Las 10 tareas principales para la programación sin conexión
A menudo vemos personas implementando las mismas tareas, o similares, usando programación fuera de línea. Para facilitarle la vida, hemos recopilado una lista de las tareas más comunes, junto con instrucciones sobre cómo implementarlas mediante la programación fuera de línea.
Puede encontrar simulaciones interactivas y tutoriales sobre cómo programar estas tareas en RoboDK en nuestra página de ejemplos.
1. Mecanizado robótico
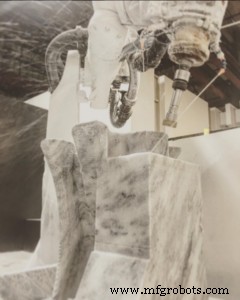
En el pasado, el fresado y el mecanizado automatizados tendían a realizarse con máquinas CNC. Si los robots estaban involucrados, generalmente solo se usaban para atender máquinas.
En estos días, sin embargo, los robots están comenzando a usarse para el mecanizado en sí. La mayor precisión de los robots industriales y la programación fuera de línea más intuitiva significan que puede convertir fácilmente el código CNC en instrucciones para robots.
RoboDK incluye una herramienta de mecanizado de robot dedicada en su menú de Utilidades. Vea una demostración en este enlace:RoboDK Machining.
2. Elegir y colocar
Posiblemente, la tarea robótica más popular es recoger y colocar, que consiste en mover objetos de una parte de la celda de trabajo a otra. Tales tareas son muy fáciles de programar usando la programación fuera de línea. Es posible programar una tarea sencilla de recoger y colocar en menos de 15 minutos, como demostré en un artículo anterior.
Vea una demostración en este enlace:RoboDK Pick and Place.
3. Pintura de robots
Si le pidiera a cualquier miembro del público que nombrara algunas tareas robóticas industriales, apuesto a que la pintura robótica ocuparía un lugar destacado en su lista. La pintura es una de las aplicaciones robóticas más típicas y es fácil de hacer usando la programación fuera de línea. El software puede generar las trayectorias de herramientas en cuestión de minutos.

Vea una demostración en este enlace:RoboDK Painting.
4. Soldadura por puntos robótica
La programación fuera de línea se ha utilizado durante mucho tiempo para generar programas para la soldadura por puntos. Sin embargo, en el pasado, esto requería muchas horas de ardua simulación y requería un programador especializado. Con un software más nuevo, los programas de soldadura por puntos se pueden generar fácilmente, sin errores.
Vea una demostración en este enlace:RoboDK Spot Welding.
5. Impresión 3D
Diría que la impresión 3D es una de las tecnologías distintivas del siglo XXI. Aunque existe desde hace algún tiempo, las aplicaciones de impresión 3D se han disparado en la última década. Uno de los desarrollos recientes más interesantes es el uso de robots como impresoras 3D. La programación sin conexión hace que esto sea muy fácil de lograr.

RoboDK incluye una herramienta de impresión 3D dedicada en su menú de Utilidades. Vea una demostración en este enlace:RoboDK 3D Printing.
6. Picking con Transportador
Los transportadores se utilizan en muchas industrias para transportar objetos entre diferentes procesos de valor agregado. Sin embargo, a menudo son difíciles de integrar con un robot. Si su software de programación fuera de línea los admite (como lo hace RoboDK), puede ahorrarle mucho tiempo de integración en línea.

Vea una demostración en este enlace:RoboDK Conveyor Picking.
7. Inspección automatizada
La inspección mediante visión artificial se ha convertido en una aplicación popular para los robots. Las razones de esto son claras:la inspección manual es una tarea ardua que aumenta a medida que aumenta la productividad. La programación fuera de línea de la visión artificial nunca podrá reemplazar por completo la programación en línea (ya que necesita entrenar las cámaras con imágenes reales), pero puede ayudar a acelerar el proceso de integración.

Vea una demostración en este enlace:Inspección automatizada de RoboDK .
8. Dibujo
Dibujar puede parecer una actividad frívola para un robot. Sin embargo, tiene muchas aplicaciones útiles. Los robots se pueden usar para dibujar patrones de glaseado en pasteles, cortar contornos artísticos con herramientas de fresado y pintar con un estilo de escritura a mano en los productos. La programación sin conexión facilita la conversión de imágenes SVG (el estándar para imágenes vectoriales) en rutas de robot.
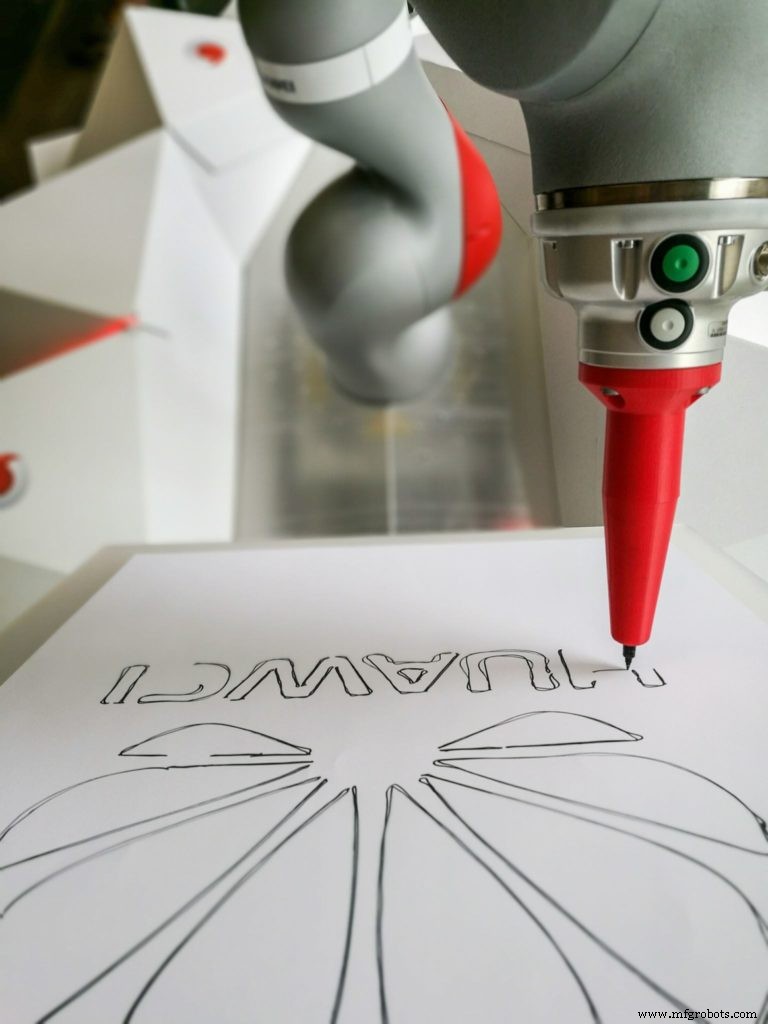
Vea una demostración en este enlace:RoboDK Drawing.
9. Integrando un Eje Externo
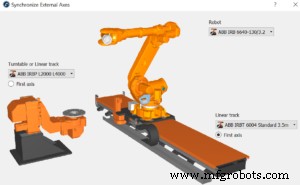
Esta no es realmente una "tarea" en sí misma. Es más como una técnica para mejorar la gama de tareas que puede realizar con el robot. Los ejes externos le permiten ampliar el espacio de trabajo del robot para tareas como pintar, soldar por puntos, inspeccionar, etc. Son básicamente uno o dos grados de libertad adicionales que se agregan al robot. El único problema es que deben sincronizarse con el robot. Con la programación fuera de línea, esta sincronización es fácil.
RoboDK incluye una herramienta de sincronización dedicada para ejes externos en su menú de Utilidades. Vea una demostración en este enlace:Mecanizado RoboDK con eje externo.
10. Todo lo que puede hacer un robot... OLP también lo puede hacer
Incluso si su tarea no aparece aquí, es probable que pueda lograrla con la programación fuera de línea. Si no está seguro, no dude en contactarnos y preguntarnos sobre su tarea en particular, o publicar un comentario a continuación.
La mejor forma de comenzar a usar la programación sin conexión es simplemente descargar el software y probarlo usted mismo. Descargue una copia de prueba gratuita en este enlace:Descargar RoboDK.
Robot industrial
- Las 7 principales tendencias de fabricación para 2020
- Los 3 materiales más resistentes para sujetadores de plástico
- Los 4 mejores estilos de clavija para tornillos de plástico
- Los 7 mejores podcasts para desarrolladores de IOT
- Los 10 principales flujos de trabajo para fabricantes
- Las 5 principales ventajas de SaaS para los fabricantes
- 7 libros principales de ingeniería electrónica
- Cómo elegir un proyecto para la automatización
- Los mejores consejos para soldar aluminio
- Programación CNC para maquinistas CNC
- Principales razones por las que falla el sistema hidráulico