


Eficiente algoritmo de optimización de variables ortogonales para sistemas de comunicación
Este artículo analiza un algoritmo para encontrar el punto ajustado óptimo en un espacio bidimensional con vectores de entrada ortogonales. El algoritmo resuelve ecuaciones para círculos que se cruzan basándose en puntos de datos medidos.
Varias métricas clave de rendimiento del sistema se determinan mediante parámetros de entrada ortogonales correspondientes a amplitud y fase; dos ejemplos son la alimentación directa de la portadora del modulador en cuadratura y la supresión de banda lateral. Estos parámetros se mejoran optimizando el balance de compensación de CC y el balance de amplitud y fase entre las entradas de banda base en cuadratura del modulador.
Dado que encontrar el ajuste óptimo de estos parámetros no es una tarea trivial dado el espacio bidimensional, en este artículo analizaré un algoritmo de Python para encontrar el punto ajustado óptimo en un espacio bidimensional con vectores de entrada ortogonales. El algoritmo resuelve ecuaciones para círculos que se cruzan basándose en puntos de datos medidos y encuentra el punto óptimo en tan solo cuatro iteraciones. Para ejemplificar la técnica, utilicé el convertidor digital a analógico (DAC) integrado AFE7070 de Texas Instruments (TI) más el parámetro de alimentación directa de la portadora del modulador en cuadratura.
Optimización de las emisiones espúreas
Los sistemas de comunicación se esfuerzan por minimizar las emisiones no esenciales. Algunas de estas emisiones no esenciales se originan por desajustes ortogonales de la señal de entrada. Por ejemplo, el desajuste de compensación de CC y el desequilibrio de amplitud / fase afectarán a los parámetros de supresión de banda lateral y alimentación de portadora, respectivamente, en moduladores de cuadratura analógicos. El ajuste de las variables de entrada a un punto de ajuste óptimo minimiza la salida espuria.
La Figura 1 representa el parámetro medido como la magnitud (r) del vector desde el punto optimizado, [x0, y0], al punto real en un plano bidimensional. El valor del parámetro está limitado por [0,1], un círculo unitario. Un 0 representa una cancelación completa o ausencia de señal y un 1 representa una ausencia total o ausencia de cancelación. En escalas de decibelios, la función está limitada por [-inf, 0]. El círculo de radio r representa todos los puntos x, y posibles que alcanzan la misma magnitud.
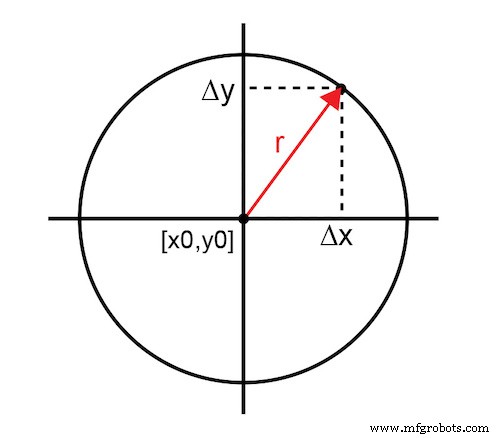
Figura 1. Vector desde el punto optimizado al punto real
La ecuación 1 representa la función en su forma más simple:
 (1)
(1)
Las constantes [a0, b0] representan factores de normalización dependientes del sistema para mantener el resultado máximo menor que 1. Técnicamente, la Ecuación 1 describe una elipse, ya que los factores de escala para cada variable independiente no necesitan ser los mismos. Para simplificar este análisis, a0 es igual a b0, de modo que las curvas son verdaderamente círculos.
El objetivo es encontrar el punto óptimo [x0, y0] que minimice el parámetro de medición (r) lo más rápido posible. Encontrar ese punto de manera eficiente con parámetros de entrada que varían estadísticamente es un desafío. El enfoque tradicional de caza y picoteo utiliza ensayos sucesivos para reducir al punto óptimo. Aunque esto produce la solución deseada, se necesitan demasiadas iteraciones cuando el tiempo de convergencia es crítico, lo que requiere un nuevo método.
Círculos que se cruzan
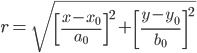
Idealmente, exactamente tres iteraciones de medición utilizando círculos que se cruzan determinan el punto óptimo. El primer resultado medido en un punto de entrada arbitrario [x1, y1] define infinitas posibilidades para el punto óptimo representado por el círculo A de radio r1. Agregar un segundo punto de datos produce otro conjunto de datos infinito representado por el círculo B; sin embargo, las intersecciones de los dos círculos reducen la solución a dos puntos. Un tercer punto de datos y el círculo C correspondiente proporcionan una tercera curva donde solo hay un punto de intersección mutua. Ese punto de intersección es el punto óptimo. La Figura 2 muestra la progresión de los círculos que se cruzan que culminan en el punto óptimo definitivo.
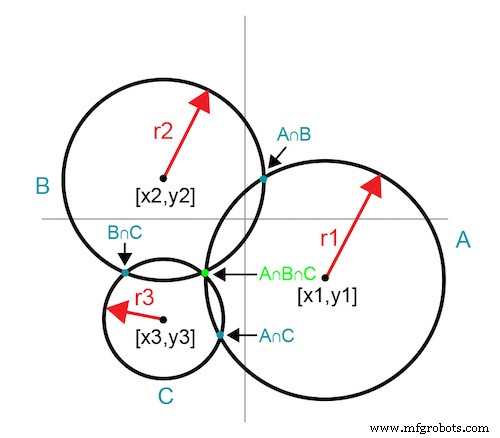
Figura 2. Los círculos que se cruzan revelan un punto de intersección común
Esta técnica revela el punto óptimo en exactamente tres iteraciones. Una cuarta iteración mide el punto óptimo para confirmar y documentar el resultado.
La Figura 3 ilustra una técnica para eliminar una iteración mediante el uso de información de límites conocida empíricamente en el plano x-y. Seleccione el punto inicial en uno de los puntos límite para que la primera curva (A) sea un arco de 90 grados. Seleccione el segundo punto en el primer arco moviéndose en la dirección xo y.
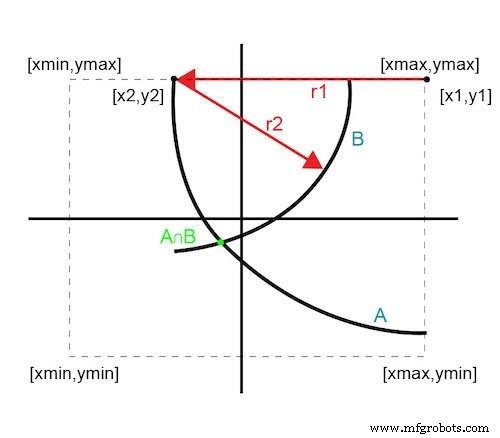
Figura 3. Solución de dos iteraciones
Dado que el segundo punto todavía está en el borde del límite, su curva es un arco de menos de 180 grados. La intersección de estas dos curvas proporciona un único punto óptimo. Este enfoque revela el punto óptimo en solo dos iteraciones y lo confirma con tres.
Aproximación de círculos sucesivos
La solución óptima depende de la precisión de la ecuación matemática. En una situación de medición real, varios supuestos o errores afectarán los resultados. Las señales medidas son muy pequeñas; las tolerancias de ruido y medición introducen errores. El uso de círculos perfectos en lugar de elipses introduce cierta incertidumbre. Los supuestos de factores de escala necesarios para resolver múltiples ecuaciones también introducen incertidumbre. Estos errores y suposiciones se traducen en falta de claridad en las curvas.
La figura 4 ilustra cómo las curvas difusas no garantizan un punto de intersección exacto; en cambio, definen un área de convergencia.
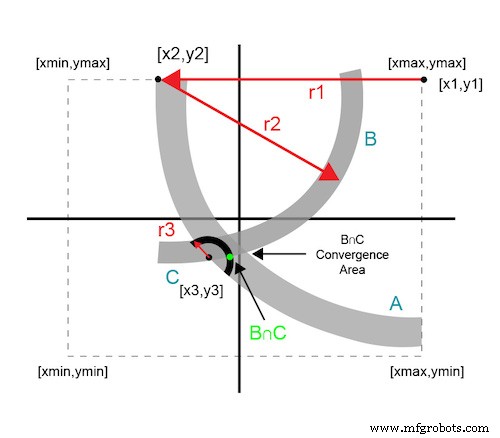
Figura 4. Aproximación de intersección de círculo sucesivo
Cada punto de datos adicional utiliza los datos de la iteración anterior. Los círculos sucesivos convergen en un área de solución que se encuentra dentro del umbral mínimo del sistema.
Ejemplo de medición
El ejemplo utiliza el AFE7070 DAC y optimiza el parámetro de alimentación del portador. El AFE7070 es una plataforma conveniente, ya que el DAC y el modulador están integrados. El desequilibrio de compensación de CC en las entradas en cuadratura del modulador determina el rendimiento de la transmisión de la portadora. El AFE7070 tiene una función de sintonización digital interna para controlar minuciosamente el balance de compensación de CC. No se necesita mucho; la resolución está en la escala de microvoltios.
Los parámetros x, y del ejemplo son valores de pasos digitales enteros que controlan el nivel de CC en las entradas en cuadratura. El muestreo estadístico anterior del dispositivo proporcionó los límites x, y de las variables de entrada, así como las tablas de pasos utilizadas en los cálculos. Las tablas de pasos proporcionan una "conversión" de un paso de portador medido en milivatios decibelios a un factor delta-x (o delta-y).
Un valor medido alto (o en otras palabras, pobre) significa que el ajuste está muy lejos y necesita un delta más grande para alcanzar el punto óptimo. Por el contrario, un valor bajo significa que el punto de ajuste está cerca y necesita una pequeña corrección. Este poco de "tarea" es necesario para garantizar que los puntos iniciales de conjetura no estén demasiado lejos y para reducir el tiempo de iteración al mínimo.
La Figura 5 muestra el algoritmo de Python que encuentra las variables de entrada óptimas en cuatro iteraciones o menos.
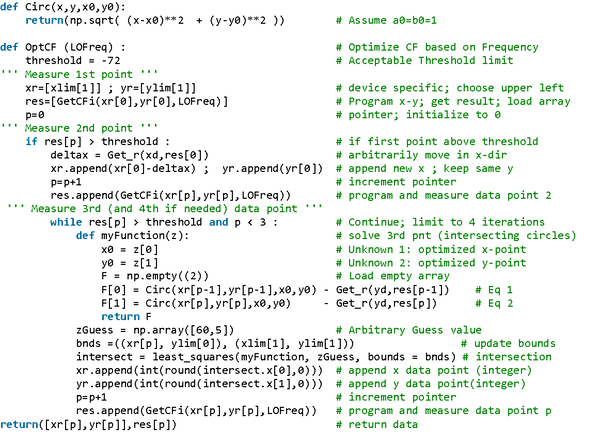
Figura 5. Algoritmo de optimización de Python
Las funciones “Get_r” y “GetCFi” son medidas específicas del dispositivo. He omitido el código por brevedad, ya que es intrascendente para demostrar el algoritmo de optimización. En sus aplicaciones, estas funciones son pertinentes para la programación y medición de los parámetros del dispositivo en su sistema.
Conclusión
Para el AFE7070 DAC, en la mayoría de los casos, el algoritmo optimiza el paso de la portadora en tres iteraciones y en menos de 1.7 s, controlado principalmente por el tiempo de asentamiento y barrido del analizador de espectro. Los métodos de los pasos anteriores tardaron casi 20 iteraciones y más de 20 s en completarse. Este algoritmo representa una mejora de la velocidad de más de 10 veces en comparación con el enfoque tradicional. Otros parámetros del sistema de comunicación que dependen de las variables de entrada ortogonales de ganancia y fase también pueden utilizar este algoritmo para ubicar de manera eficiente una solución óptima.
Los artículos de la industria son una forma de contenido que permite a los socios de la industria compartir noticias, mensajes y tecnología útiles con los lectores de All About Circuits de una manera que el contenido editorial no es adecuado. Todos los artículos de la industria están sujetos a estrictas pautas editoriales con la intención de ofrecer a los lectores noticias útiles, experiencia técnica o historias. Los puntos de vista y las opiniones expresados en los artículos de la industria son los del socio y no necesariamente los de All About Circuits o sus redactores.
Robot industrial
- Una taxonomía para el IIoT
- Construyendo sistemas de fabricación flexibles para Industrie 4.0
- Reimaginando los sistemas ERP en la fabricación moderna para el crecimiento futuro
- Introducción a los sistemas de comunicación de fibra óptica
- Los beneficios de utilizar Robotic Vision para aplicaciones de automatización
- Las empresas establecen plazos para los sistemas inteligentes
- Los 10 principales flujos de trabajo para fabricantes
- 10 ideas para operaciones de almacén más eficientes y productivas
- Recopilar datos de campo para la optimización de procesos
- Un punto de inflexión para la automatización robótica
- Establecimiento de una línea base del sistema para un rendimiento óptimo