


Minimización del ruido y la vibración del motor paso a paso en aplicaciones de control de movimiento de precisión
Los motores paso a paso funcionan bien en una amplia gama de aplicaciones, pero pueden tener problemas con la ondulación del par y los problemas de distorsión de la corriente. Conozca QuietStep, un algoritmo patentado de Allegro MicroSystems, como una posible solución.
Los motores paso a paso ofrecen ventajas únicas sobre los motores de corriente continua (CC) y CC sin escobillas (BLDC) en muchas aplicaciones. Un motor paso a paso bipolar proporciona una posición de bucle abierto precisa, así como un par de velocidad cero sin utilizar un bucle de control o sensores externos. Con sus capacidades de paso controlado, los motores paso a paso funcionan bien en una amplia gama de aplicaciones de control de movimiento de precisión, incluidos televisores de circuito cerrado (CCTV), impresoras 3D, control numérico por computadora (CNC), equipos de fabricación textil y máquinas de recogida y colocación.
El despliegue exitoso de motores paso a paso requiere una gestión eficaz del ruido y la vibración. En aplicaciones de CCTV, por ejemplo, la vibración se traduce directamente al sensor de imagen y al cardán. El zoom grande combinado con el movimiento puede distorsionar la imagen. En la impresión 3D, la resonancia del motor o el sobreimpulso causado por la alta ondulación del par pueden provocar muchos artefactos de impresión no deseados. En la mayoría de los casos, la reducción de la vibración del motor da como resultado una mejor calidad de imagen o una impresión 3D más precisa. La reducción de la vibración del motor también permite un funcionamiento general más silencioso.
Las tecnologías avanzadas basadas en algoritmos patentados ahora están disponibles para minimizar el ruido y la vibración en los diseños de motores paso a paso al reducir la ondulación del par y la distorsión de la corriente. Antes de profundizar en estas soluciones de control de movimiento, es útil comprender qué causa la vibración y, a su vez, el ruido audible. Primero, echemos un vistazo más de cerca a cómo funciona un motor paso a paso.
Conceptos básicos de los pasos a seguir
Un motor paso a paso bipolar es un motor de CC con posiciones de polos discretas construido con múltiples bobinas dispuestas en dos grupos llamados fases. La relación de corriente entre las dos fases determina cómo se coloca el rotor entre los dos devanados. De esta manera, un motor paso a paso puede dividir su posición entre dos polos en incrementos más pequeños llamados micropasos.
La corriente en cada devanado del motor paso a paso se puede sumar para crear un vector donde la magnitud del vector es el par. Al examinar la corriente en cada una de las dos fases en el espacio polar, podemos visualizar el vector a medida que gira a través de cada ciclo eléctrico.
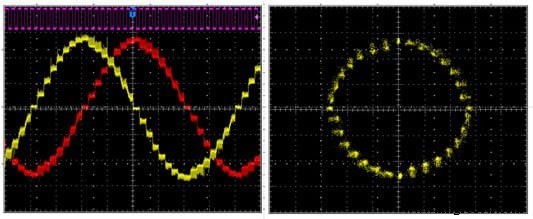
Figura 1. Corriente de fase en cada uno de los dos devanados de un motor paso a paso bipolar en 1/8 de paso (izquierda). Corriente de fase en cada uno de los dos devanados de un paso a paso bipolar en 1/8 de paso, pero representada en el dominio polar (derecha).
En el dominio basado en el tiempo (Figura 1 izquierda), el par se define como la suma del área bajo las dos curvas. En el dominio polar (Figura 1 derecha), la magnitud del vector es el torque. En estas imágenes, podemos ver que el par es constante a medida que el campo se mueve a través de cada ciclo eléctrico. Cuando el par no es constante, el sistema experimenta vibraciones y ruido audible.
Suponiendo que el motor no está funcionando en resonancia, la ondulación del par se convierte en la mayor fuente de ruido audible y vibración en un motor paso a paso.
Control de un motor paso a paso (control de corriente)
El control de corriente de modulación de ancho de pulso (PWM) es la forma más común de impulsar un paso a paso. Al implementar el control de corriente, el controlador PWM corta la salida, limitando la corriente en cada devanado para mantener una relación que define la posición del rotor.
La naturaleza del control de corriente PWM da como resultado una fluctuación de corriente basada en el ciclo de trabajo aplicado, la inductancia del motor y el voltaje a través de él. Para minimizar la ondulación, el controlador puede gestionar cómo disminuye la corriente en los devanados mediante la implementación de varios modos de caída.
Repasemos los modos de decaimiento comunes para un solo ciclo de PWM comenzando con la aceleración de la corriente del variador.
Después de la unidad, que se muestra en la figura 2A, el modo de caída se implementa durante el tiempo de inactividad de PWM a través de dos métodos síncronos que se muestran en la figura 2B y 2C.
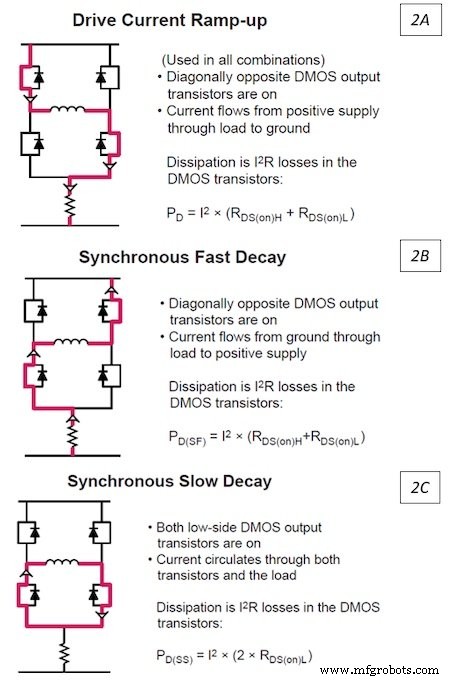
Figura 2. Ruta actual en puente completo que muestra los modos de impulsión y caída.
El decaimiento rápido proporciona un control de corriente óptimo, pero da como resultado una alta ondulación. La caída lenta da como resultado una ondulación baja, pero la tasa de caída está sujeta a la fuerza electromotriz trasera del motor (BEMF), que en algunos casos puede crear distorsiones en la corriente.
La Figura 3A muestra lo que puede suceder cuando se usa un decaimiento lento al 100 por ciento. Cuando la corriente del devanado está cayendo, la caída lenta no puede disminuir la corriente lo suficientemente rápido, provocando distorsión en el borde descendente. La Figura 3B muestra los efectos de usar un decaimiento rápido al 100 por ciento. La corriente de ondulación es mucho mayor, pero el controlador mantiene un control preciso de la corriente.
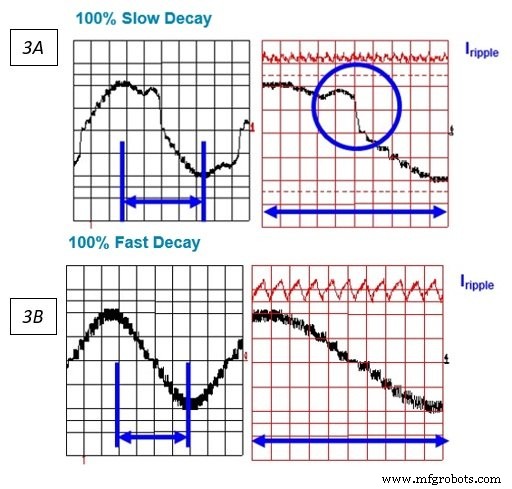
Figura 3A. La caída lenta puede producir distorsión cuando la corriente en la carga está disminuyendo.
Figura 3B. El decaimiento rápido provoca una gran ondulación de la corriente, que puede provocar vibraciones y ruido audible.
Podemos evitar los efectos que se muestran en la Figura 1 y también mantener una corriente de ondulación razonable al llegar a un compromiso. Cuando la corriente está disminuyendo en la carga, el conductor implementa una combinación de decaimiento rápido y lento, conocido como decaimiento mixto. El tiempo de inactividad se divide en una porción de caída rápida y una porción de caída lenta, como se muestra en la Figura 4. Cuando la corriente en la carga aumenta, la caída lenta minimiza la ondulación.
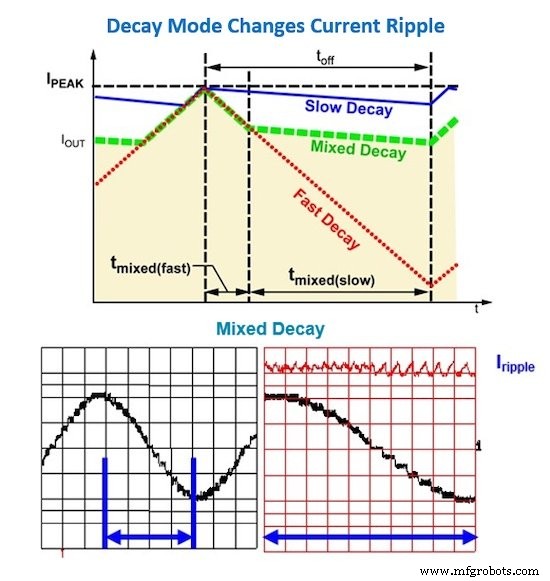
Figura 4. La desintegración mixta minimiza la ondulación y al mismo tiempo mantiene el control de la corriente en el devanado.
Dependiendo de las características de un motor paso a paso y su constante de tiempo LR, la caída lenta en el borde ascendente puede crear problemas en corrientes bajas donde la tasa de cambio en la corriente es demasiado rápida para que el controlador PWM la regule a corrientes bajas debido a la supresión del amplificador de detección de corriente. Este escenario puede resultar en una distorsión de la corriente cuando la corriente en la carga aumenta, como se muestra en la Figura 5.
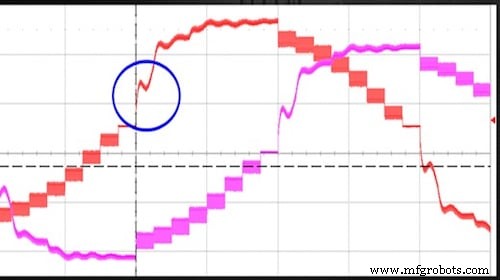
Figura 5. La caída lenta en el borde ascendente puede causar distorsión en motores con ciertas características LR.
Es difícil lograr un compromiso fácil que funcione para todos los motores paso a paso bipolares. Para resolver estos problemas manteniendo la menor ondulación posible, el sistema debe adaptarse a las diferentes características del motor.
Un nuevo enfoque para reducir la ondulación del par
Allegro ha introducido una forma de reducir la ondulación del par y la distorsión de la corriente para aplicaciones de motores paso a paso. Llamada QuietStep, esta innovación ahora está disponible como una opción en el último controlador de motor paso a paso A5984 de Allegro.
La tecnología QuietStep utiliza un algoritmo patentado que ajusta dinámicamente (hacia arriba o hacia abajo) el porcentaje de decaimiento rápido necesario ciclo por ciclo para lograr el mejor rendimiento posible en todas las condiciones de funcionamiento sin utilizar software complejo.
El algoritmo invierte el enfoque tradicional de la desintegración mixta implementando primero la desintegración lenta, seguida de la desintegración rápida. La Figura 6A muestra la desintegración mixta tradicional con la porción fija de desintegración rápida y lenta y con la desintegración rápida iniciando el ciclo de tiempo de inactividad de PWM. La Figura 6B muestra cómo comienza el deterioro lento cuando se usa QuietStep al comienzo del ciclo de tiempo de inactividad de PWM. QuietStep ajusta automáticamente la relación de caída rápida y lenta para minimizar la ondulación de la corriente mientras se mantiene una regulación precisa de la corriente.
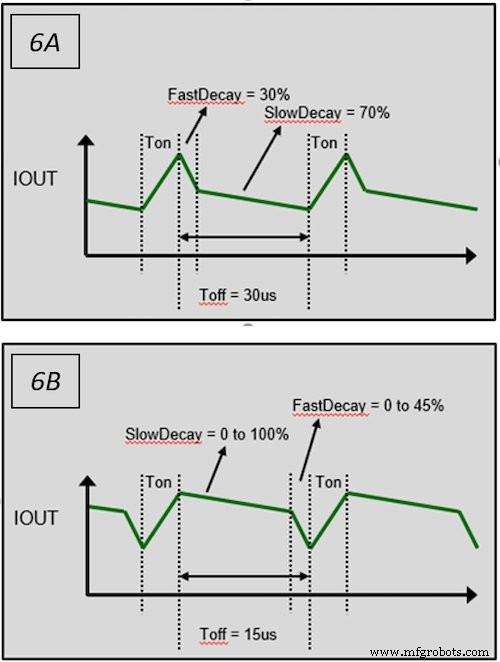
Figura 6A. Decaimiento mixto tradicional donde se fija la proporción de decaimiento rápido y lento.
Figura 6B. QuietStep puede ajustar dinámicamente la proporción de decaimiento rápido y lento para mantener el control de la corriente y minimizar la ondulación de la corriente.
La caída rápida se introduce solo cuando es necesario para la regulación de la corriente, lo que da como resultado la corriente de ondulación más baja posible. La Figura 7 muestra la alta corriente de ondulación resultante de la desintegración mixta fija con la disminución de la corriente y la pérdida de control de la corriente con la disminución lenta con el aumento de la corriente. La tecnología QuietStep elimina estos efectos al reducir la corriente de ondulación a la mitad en comparación con el decaimiento mixto. Cuando la corriente aumenta, QuietStep mantiene la regulación de corriente hasta cero amperios.
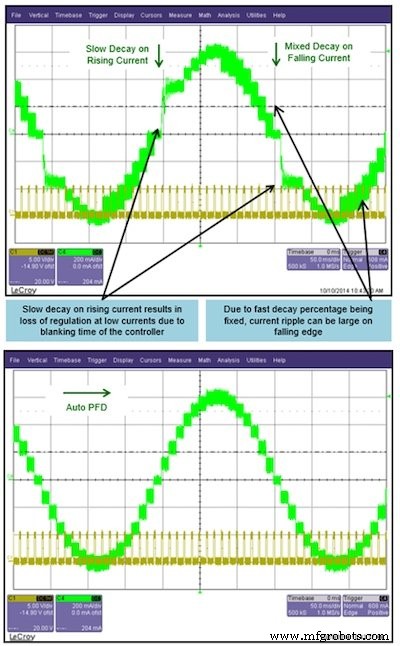
Figura 7. El decaimiento lento tradicional con corriente creciente y el decaimiento mixto para corriente decreciente dan como resultado una pérdida de regulación al subir con corriente creciente y una gran ondulación con corriente decreciente. QuietStep proporciona una excelente regulación de la corriente con una corriente creciente mientras mantiene una corriente de ondulación baja a lo largo de todo el ciclo eléctrico.
La reducción de la ondulación y la resonancia de la corriente a nivel del sistema minimiza la vibración, así como el ruido audible causado por la vibración. El resultado es una mejor imagen de video en sistemas CCTV y una calidad de impresión superior en impresoras 3D.
La reducción del ruido audible y la vibración mejora casi todas las aplicaciones de control de motores, desde cerraduras de puertas de automatización del hogar y control de válvulas hasta sistemas de visión de precisión e impresión 3D. La tecnología QuietStep de Allegro elimina la molestia de tratar de determinar la fuente de ruido y vibración en un sistema. Completamente integrado en el IC, QuietStep es fácil de implementar, no requiere programación ni componentes externos y es completamente automático.
Implementación de QuietStep con controladores de motor paso a paso bipolar
Con controladores de motor de micropasos que habilitan esta tecnología avanzada, como el Allegro A5984, las formas de onda de corriente se optimizan automáticamente en una amplia gama de velocidades y características de motores paso a paso. Las soluciones de controlador de motor paso a paso, equipadas con tecnología QuietStep, ajustan la cantidad de caída rápida sobre la marcha durante un ciclo PWM para minimizar la ondulación de la corriente en diversas condiciones de funcionamiento.
La función QuietStep mejora el rendimiento del sistema, lo que reduce el ruido audible del motor, reduce la vibración y aumenta la precisión de los pasos. Utilizando esta tecnología, el controlador A5984 está diseñado para operar motores paso a paso bipolares desde modos de paso completo hasta 1/32 y permite una capacidad de impulsión de salida de hasta 40 V y ± 2 A. En general, el algoritmo QuietStep permite un sistema más fácil diseño, implementación y operación.
Para obtener más información sobre el controlador A5984 y la tecnología QuietStep, visite la página del producto A5984.
Allegro MicroSystems es un líder mundial en soluciones de detección y energía para control de movimiento y sistemas energéticamente eficientes. Para obtener más información, visite el sitio web de Allegro MicroSystems.
Los artículos de la industria son una forma de contenido que permite a los socios de la industria compartir noticias, mensajes y tecnología útiles con los lectores de All About Circuits de una manera que el contenido editorial no es adecuado. Todos los artículos de la industria están sujetos a estrictas pautas editoriales con la intención de ofrecer a los lectores noticias útiles, experiencia técnica o historias. Los puntos de vista y las opiniones expresados en los artículos de la industria son los del socio y no necesariamente los de All About Circuits o sus redactores.
Robot industrial
- Circuitos permisivos y de enclavamiento
- Motores paso a paso
- ACS712 Funcionamiento y aplicaciones del sensor de corriente
- Renesas amplía la gama de MCU RX24T y RX24U para aplicaciones de control de motores
- Nanotec:controlador de motor compacto para motores DC sin escobillas y motores paso a paso
- Aplicaciones y limitaciones de algoritmos genéticos
- Cómo la soldadura TIG robótica agrega precisión y control de calidad a su producción
- IQ Motion Control lanza una nueva gama de servomotores
- La zona gris entre servomotores y motores paso a paso
- El control de movimiento con seguridad integrada permite que la seguridad y la productividad coexistan
- Conexiones para Control:Interfaces de Comunicaciones para Sensores de Posición y Movimiento