


Control PID de Robot Gripper en Matlab / Simulink
En este tutorial veremos cómo realizar el control PID del modelo 3D de un mecanismo de agarre de robot. El modelo de Simulink está organizado en dos subsistemas. Un subsistema de motor de CC que se modela con bloques de Simulink y un modelo 3D que se importa de Solidworks con SimMechanics Link. Usamos una función de paso para activar el motor de CC para impulsar la pinza robótica y usamos el bloque PID de Simulink para ajustar automáticamente los parámetros del PID.
Puede ver el siguiente video o leer el tutorial escrito a continuación.
Descargue el modelo de Simulink del ejemplo aquí:
Encuentre y descargue el modelo 3D del mecanismo de agarre del robot en el siguiente enlace: 
Modelo Simulink - Control PID
1 archivo(s) 538.71 KB Descargar 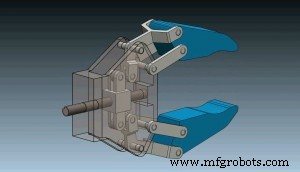
Proceso de manufactura
- El futuro de la robótica
- Píldora anticonceptiva
- Tren modelo
- Robot industrial
- Tutorial - sPiRobot:Controle y vea lo que su robot está viendo desde cualquier lugar
- Reciclar el robot de clasificación con Google Coral
- MATLAB-Simulink
- Uso de IoT para controlar de forma remota un brazo robótico
- Principios básicos de control PID y ajuste de lazo
- Control PID de Robot Gripper en Matlab / Simulink
- Simulación Solidworks y Matlab/Simulink