


Conducción 28BYJ-48 Control de motor paso a paso con joystick
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Acerca de este proyecto
Hardware requerido:
- Placa Arduino UNO
- Motor paso a paso 28BYJ-48 (con placa de controlador ULN2003A)
- Joystick
- Fuente de alimentación de 5 V
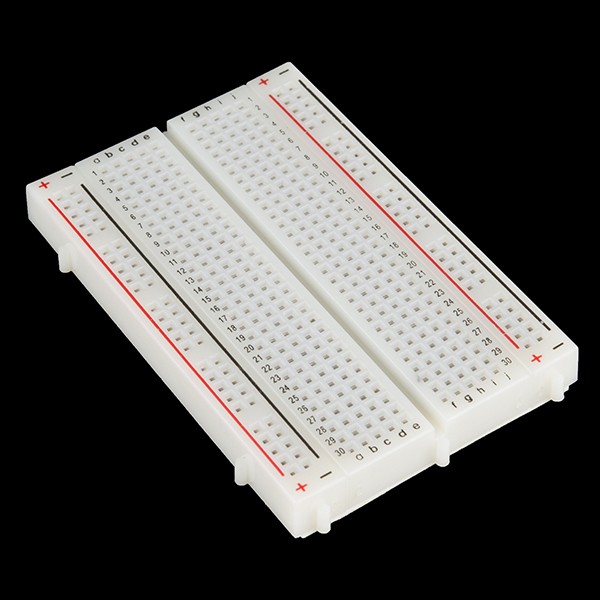
- Tabla de pan
- Cables de puente
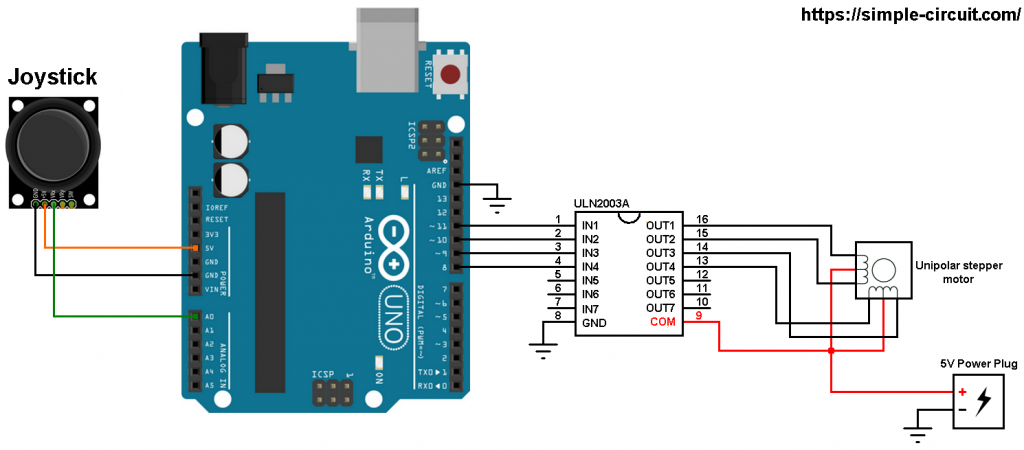
Control de motor paso a paso con Arduino y circuito de joystick:el diagrama esquemático del circuito del proyecto se muestra a continuación (todos los terminales conectados a tierra están conectados entre sí).
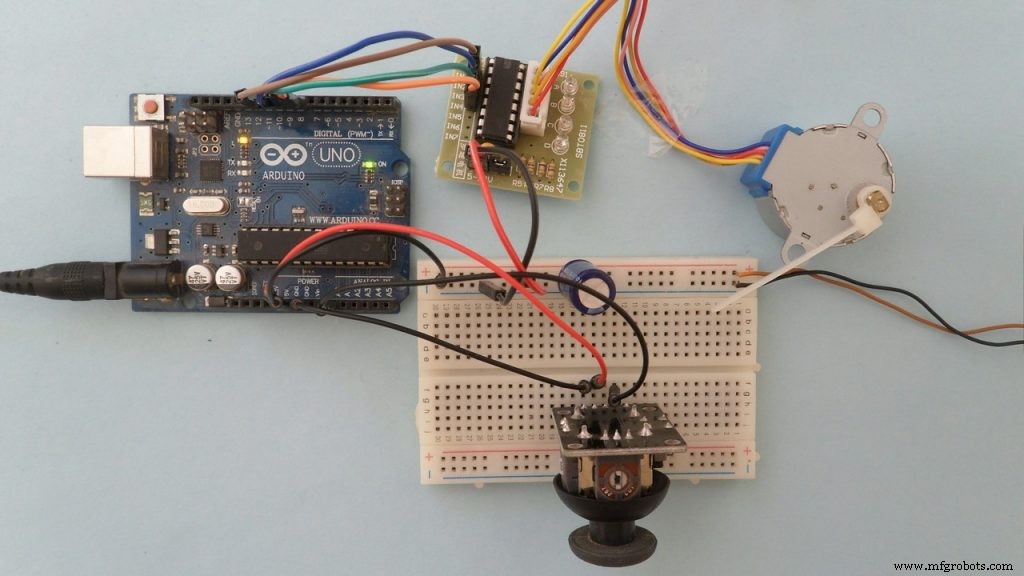
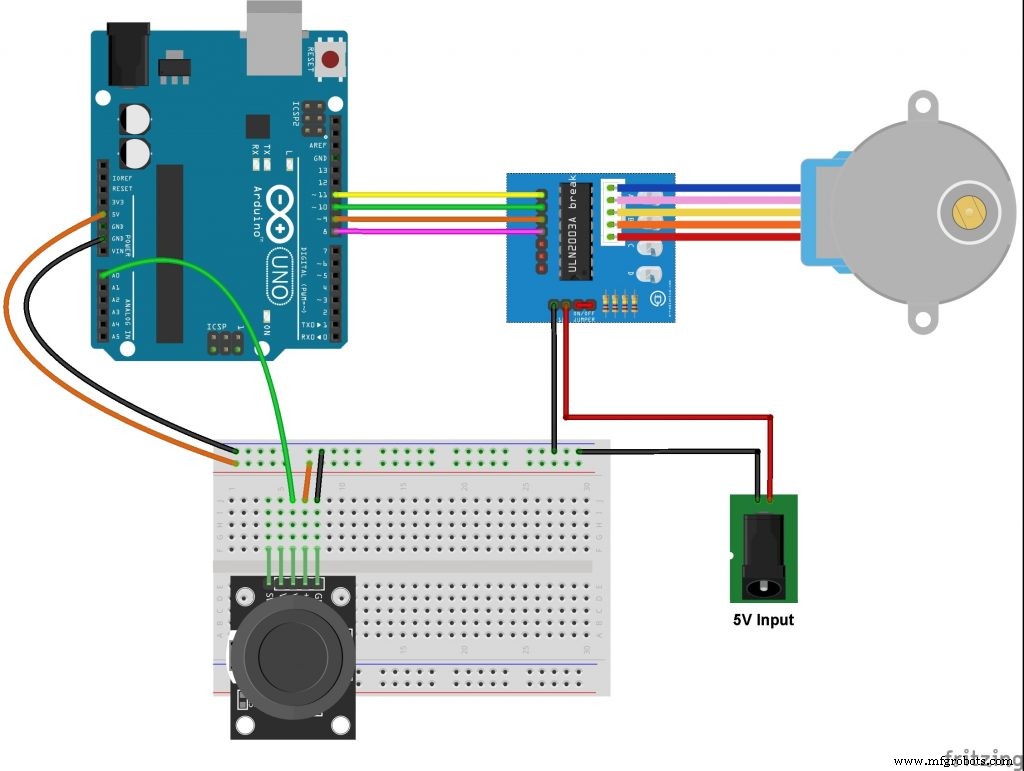
y la siguiente imagen muestra el circuito fritzing:
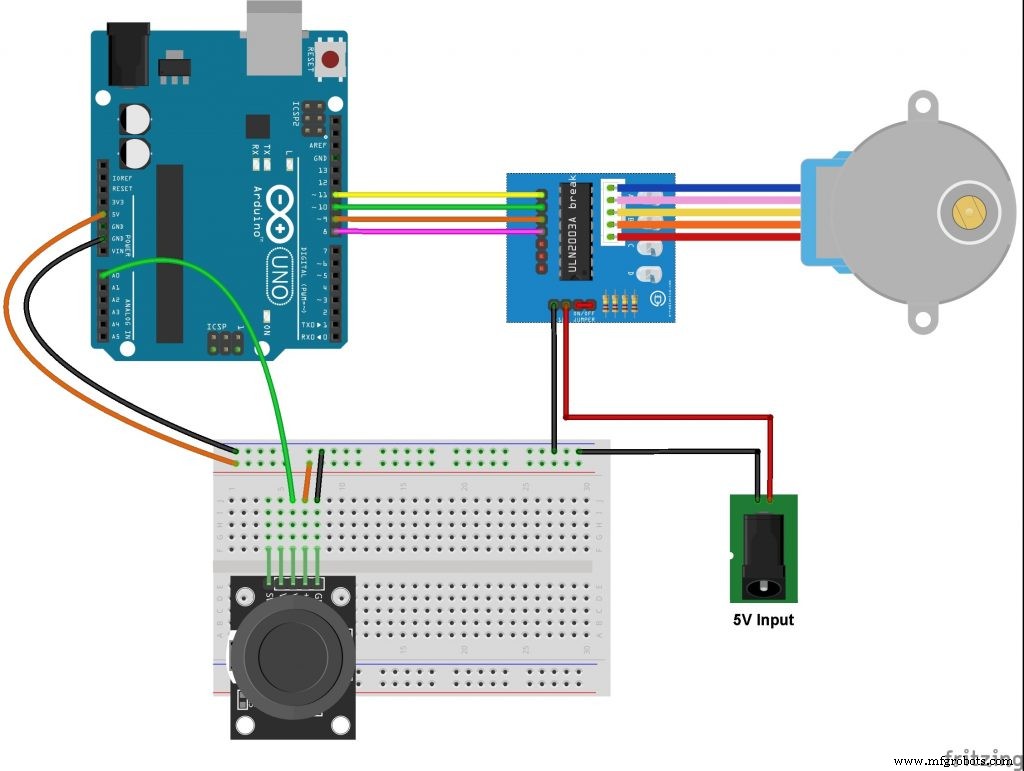
El motor paso a paso está conectado a la placa ULN2003A que se suministra con una fuente de alimentación externa de 5V. Las líneas de control (IN1, IN2, IN3 e IN4) de esta placa están conectadas al Arduino de la siguiente manera:IN1 al pin 11IN2 de Arduino al pin 10IN3 de Arduino al pin 9IN4 de Arduino al pin 8 de Arduino
La placa del joystick tiene 5 pines:GND, + 5V, VRX, VRY y SW donde:GND y + 5V son los pines de la fuente de alimentación VRX es la salida del potenciómetro del eje X VRY es la salida del potenciómetro del eje Y SW es el terminal del botón pulsador (el otro terminal está conectado a GND) .La salida del potenciómetro del eje X (VRX) está conectada al pin analógico A0 de Arduino, también se puede utilizar la salida del potenciómetro del eje Y (VRY). El pin del interruptor (SW) no se usa en este ejemplo. Usando los potenciómetros del eje X y del eje Y podemos controlar dos motores paso a paso de forma independiente.
"Entonces chicos si usted me gusta el proyecto, así que no olvides seguirlo y darle me gusta "
Código
- CÓDIGO:
CÓDIGO: C / C ++
por favor asegúrese de agregar todas las bibliotecas que se incluyen en este código// este proyecto es realizado por BEASTIDREES62 https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWaWaWZnOXIzUk1BLYWRqZD2 include biblioteca de motor paso a paso # incluir// definir el número de pasos por revolución # definir PASOS 32 // definir pines de control del motor paso a paso # definir IN1 11 # definir IN2 10 # definir IN3 9 # definir IN4 8 // inicializar biblioteca paso a paso paso a paso (PASOS, IN4, IN2, IN3, IN1); // la salida del potenciómetro del joystick está conectada a Arduino A0 # definir el joystick A0 void setup () {} void loop () {// leer el valor analógico del potenciómetro int val =analogRead (joystick); // si el joystic está en el medio ===> parar el motor if ((val> 500) &&(val <523)) {digitalWrite (IN1, LOW); escritura digital (IN2, BAJA); escritura digital (IN3, BAJA); escritura digital (IN4, BAJA); } else {// mueve el motor en la primera dirección while (val> =523) {// mapea la velocidad entre 5 y 500 rpm int speed_ =map (val, 523, 1023, 5, 500); // establece la velocidad del motor paso a paso.setSpeed (speed_); // mueve el motor (1 paso) stepper.step (1); val =analogRead (joystick); } // mueve el motor en la otra dirección while (val <=500) {// mapea la velocidad entre 5 y 500 rpm int speed_ =map (val, 500, 0, 5, 500); // establece la velocidad del motor paso a paso.setSpeed (speed_); // mueve el motor (1 paso) stepper.step (-1); val =analogRead (joystick); }}}
Esquemas
Proceso de manufactura
- Circuitos de control del motor
- Motores paso a paso
- Suavizar el rendimiento del tren motriz EV con un algoritmo de control orientado al campo
- Control de acceso con QR, RFID y verificación de temperatura
- Torreta centinela Nerf autónoma
- Controlar el aceptador de monedas con Arduino
- Biblioteca de motores paso a paso bipolares
- Obstáculos que evitan el robot con servomotor
- Swiper - Auto Tinder / Bumble Swiper
- ¡Arduino con Bluetooth para controlar un LED!
- Torno con CNC