


Suavizar el rendimiento del tren motriz EV con un algoritmo de control orientado al campo
Los motores de alto rendimiento necesitan un mecanismo de control que garantice una mayor suavidad, confiabilidad y eficiencia. Uno de los ejemplos más adecuados de una aplicación de este tipo es el motor utilizado en el sistema de propulsión de vehículos eléctricos (EV), que puede controlarse mediante un sistema basado en control orientado al campo (FOC).
Para que un tren motriz EV funcione sin problemas, el esquema de control debe ser tal que el motor pueda funcionar en un amplio rango de velocidades y producir el par máximo a la velocidad más baja. Técnicamente hablando, el control del motor debe basarse en el par y el flujo magnético, por lo que podemos controlar el par con precisión controlando la corriente.
El principio básico de la rotación del rotor de un motor es producir un campo magnético en el estator. Esto se hace energizando las bobinas del estator con corriente alterna. El secreto para el buen funcionamiento de un motor radica en conocer la posición del rotor, que es el ángulo entre el eje de flujo del rotor y el eje magnético del estator. Una vez que se conoce este valor, la corriente del estator se alinea con el eje de par del rotor. Para lograr la máxima eficiencia, el flujo magnético del estator debe ser perpendicular al flujo magnético del rotor.
Control de motor basado en FOC
En el papel, aparece un sistema típico de control de motor basado en control orientado al campo (FOC), como se muestra en la Figura 1.
haga clic para ver la imagen a tamaño completo
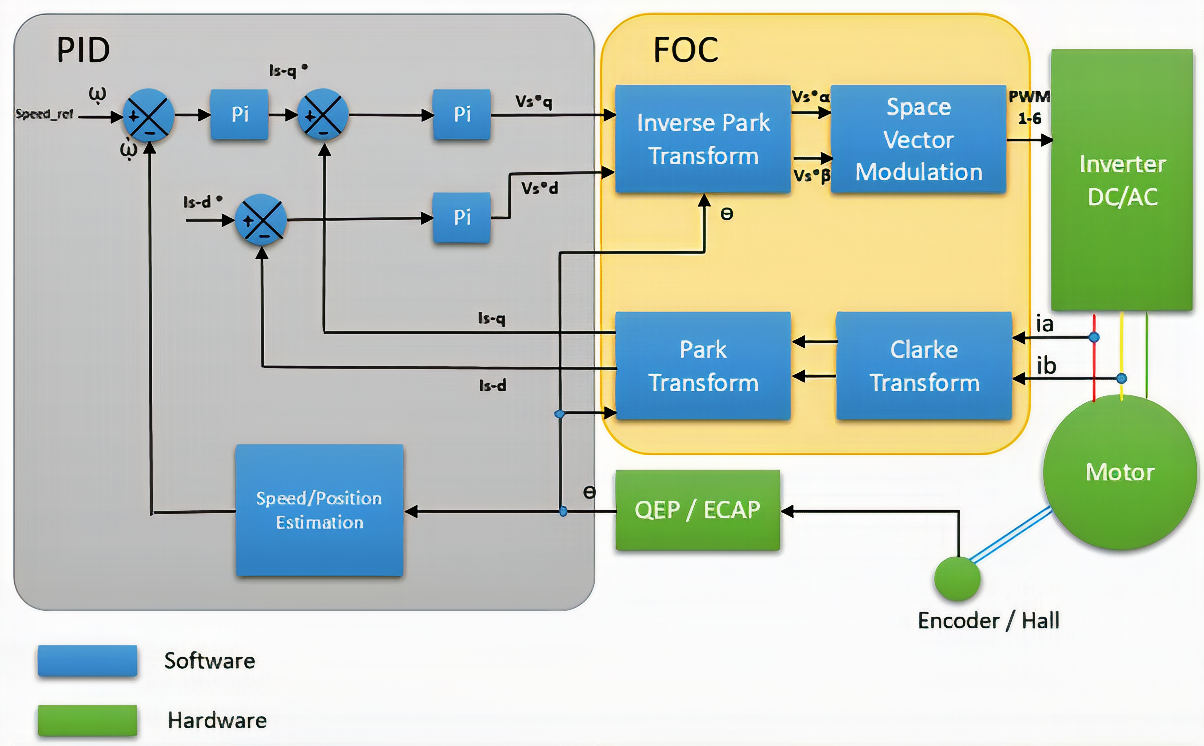
Figura 1:El diagrama muestra los componentes de hardware y software de un sistema de control de motor basado en FOC. Fuente:Texas Instruments
Comprendamos cada uno de los componentes de software y hardware:
- Inversor trifásico :Un inversor de CA / CC trifásico proporciona el voltaje trifásico al motor PMSM / BLDC para el variador. Toma señales de modulación de ancho de pulso (PWM) del bloque de modulación de vector espacial (SVM).
- Interfaz QEP :Interactúa con un codificador para obtener la posición mecánica del rotor y pasarla a otros bloques.
- Bloque de estimación de velocidad / posición :Como sugiere el nombre, los cálculos para obtener la posición y la velocidad del rotor se realizan en este bloque.
- Control PID :La derivada integral proporcional (PID) es un bucle de control que se basa en la retroalimentación del motor en forma de par. Al calcular la diferencia entre el par deseado y el par recibido del bloque de transformación Park, realiza la corrección.
- Transformación de Clarke :El bloque de transformada de Clarke convierte la corriente del estator (ia, ib) en un sistema de coordenadas de flujo y par (d-q) utilizando la fórmula de transformada de Clarke. El marco de referencia estacionario de un sistema trifásico se transforma en un sistema de dos cuadrantes en un marco de referencia estacionario.
- Transformación de parque y transformación de parque inversa :Este bloque convierte el marco de referencia estacionario en un marco de referencia giratorio con un sistema de dos fases con ejes ortogonales. Los componentes ortogonales son d-q, que son motor directo y eje de cuadratura, respectivamente. El bloque de transformación de estacionamiento inverso aparece en la imagen cuando el voltaje de salida del estator debe convertirse de nuevo a la referencia del marco estacionario (referencia del estator).
- Modulación de vector espacial :Es una técnica para determinar la señal PWM que se aplicará al motor. SVM toma el vector de voltaje del estator como entrada y produce voltaje de salida trifásico como salida.
A continuación, exploraremos cómo se utilizan estos componentes para impulsar un motor mediante el algoritmo FOC.
Una vista del flujo de trabajo de FOC
Para controlar un motor eléctrico trifásico, debemos proporcionar el voltaje adecuado al motor leyendo la corriente de fase Ia, Ib, Ic. Sin tener un control sobre ellos, no es posible crear un vector de flujo del estator, que está a 90 grados del vector de flujo del rotor.
FOC es un algoritmo intensivo en matemáticas que ayuda a lograr esto y más con facilidad, aunque desarrollar FOC es bastante complejo. El algoritmo FOC puede simplificar el control del marco de referencia de corrientes sinusoidales trifásicas descomponiéndolos en marcos de referencia de flujo y par (d-q). Estos dos componentes se pueden controlar por separado.
La figura 1 muestra el codificador / Hall que determina la posición del rotor y lo pasa al bloque de velocidad / posición. Este valor también se alimenta al bloque de transformación Park e inversa Park. En el mismo caso, las corrientes de fase (ia, ib) del motor se alimentan al bloque de transformación de Clarke. Las corrientes de fase del motor se convierten mediante la transformada de Clarke en dos corrientes ortogonales (iα, iβ). Las corrientes de fase recién convertidas ahora significan como corrientes productoras de par y de flujo, respectivamente. Aunque hemos descompuesto con éxito la corriente de fase en componentes de flujo y par, siguen siendo sinusoidales, lo que dificulta su control, ya que siguen cambiando.
La siguiente tarea del algoritmo FOC es eliminar las ondas sinusoidales, lo que requiere una entrada importante:la posición del rotor. Vemos en el diagrama que este valor también se alimenta al bloque Park-transform. En este bloque, el truco consiste en pasar de un marco de referencia estacionario, desde el punto de vista del estator, a un marco de referencia giratorio desde el punto de vista del rotor. Simplemente hablando, el bloque de transformación de Park convierte las dos corrientes de CA (iα, iβ) en corrientes de CC. Eso hace que sea bastante fácil para el bloque PID controlarlo de la forma que desee.
Pongamos el bloque PID en escena ahora. La entrada al bloque PID desde el bloque FOC es Iq e Id, componente de par y flujo. En el contexto de un EV, el bloque PID recibirá una referencia de velocidad cuando el conductor accione el acelerador. El bloque PID ahora compara los dos valores y calcula el error. Este error es el valor por el cual el bloque PID tiene que hacer girar el motor. La salida que da el bloque PID es Vq y Vd. Esta salida alcanza la transformación inversa de Clarke y Park donde tiene lugar exactamente lo contrario de la transformación de Clarke y Park. El bloque de transformación de estacionamiento inverso transforma el marco de referencia giratorio en el marco de referencia estacionario para que sus fases de motores puedan conmutarse.
haga clic para ver la imagen a tamaño completo
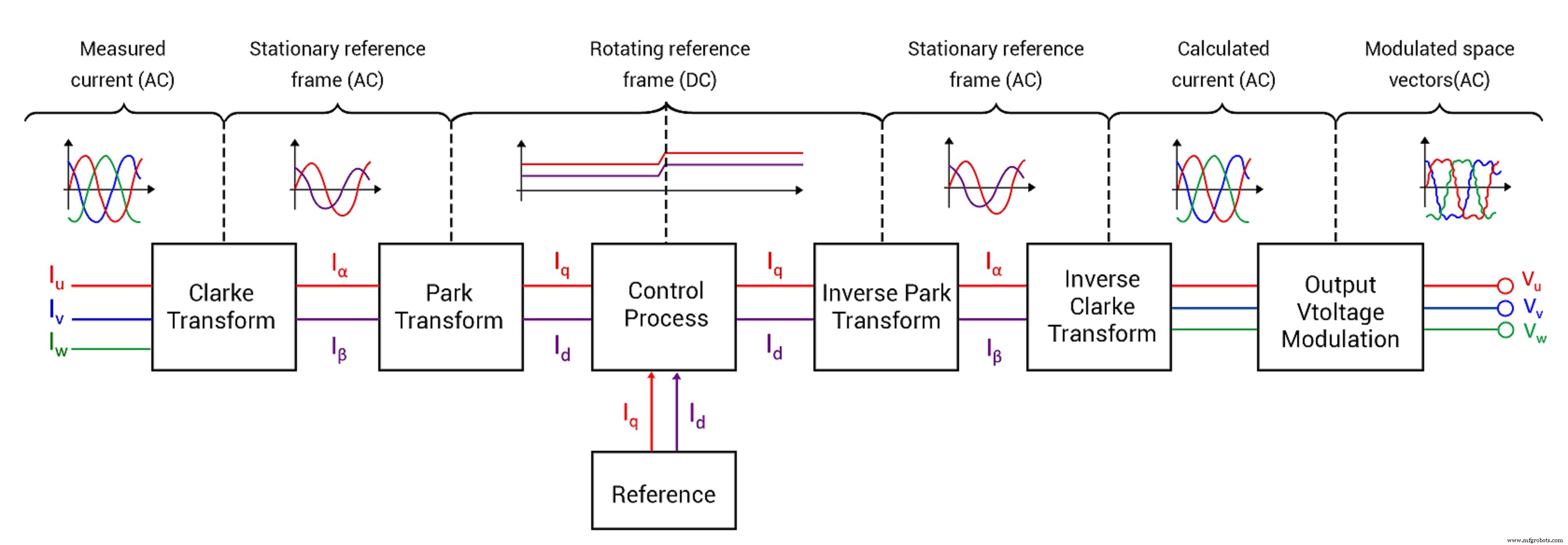
Figura 2:La salida de PID llega a la transformación inversa de Clarke y Park, donde tiene lugar exactamente lo contrario de la transformación de Clarke y Park. Fuente:Texas Instruments
En el último paso del control motor basado en algoritmos FOC, el papel de la modulación por vector espacial (SVM) adquiere mucha importancia. La función de SVM es generar las señales PWM que se alimentan al inversor que, a su vez, genera el voltaje trifásico que impulsa el motor. En cierto modo, SVM también hace el trabajo de una transformación de Clarke inversa.
Un inversor trifásico tiene seis transistores que entregan el voltaje de salida al motor. Básicamente, hay dos estados en los que estas salidas tienen que estar con el transistor superior cerrado y el inferior abierto o viceversa. Con dos estados y tres salidas, total ocho estados (2 3 ) se puede calcular. Cuando traces estos ocho estados, también llamados vectores base, en un diagrama de estrella hexagonal, encontrarás que cada vector adyacente está separado por 60 grados en términos de diferencia de fase. El SVM encuentra el vector medio que da el voltaje de salida (V out ).
Control de motor EV de facto
El FOC como esquema de control de motor es indispensable para los diseños de vehículos eléctricos. Con el tipo de funcionamiento silencioso y suave del motor que exige un EV, FOC se destaca como una buena opción. Muchos fabricantes de equipos originales y desarrolladores de sistemas de control a menudo modifican el algoritmo FOC estándar para adaptarse a los requisitos únicos de su programa de vehículos eléctricos, pero el concepto central sigue siendo el mismo.
Los avances en MCU de grado automotriz, como la familia de microcontroladores PIC18Fxx39 de Microchip o los microcontroladores en tiempo real C2000 de TI, pueden acelerar el desarrollo de un algoritmo FOC para sistemas de control de motores EV.
>> Este artículo se publicó originalmente en nuestro sitio hermano, EDN .
 Vaibhav Anand es ejecutivo de marketing digital en Embitel.
Vaibhav Anand es ejecutivo de marketing digital en Embitel.  Saurabh S. Khobe es ingeniero integrado en Embitel.
Saurabh S. Khobe es ingeniero integrado en Embitel.
Contenidos relacionados:
- Resolver desafíos deterministas de diseño de control de motores de ejes múltiples
- Controlar de forma segura un inversor de tracción EV
- Las soluciones emergentes mejoran la administración de energía de los vehículos eléctricos
- Identificación de requisitos para el desarrollo de E / E
- El controlador del motor integra el núcleo Arm Cortex-M0
Para obtener más información sobre Embedded, suscríbase al boletín informativo semanal por correo electrónico de Embedded.
Incrustado
- Circuitos permisivos y de enclavamiento
- Circuitos de control del motor
- El paquete de software simplifica los diseños de control de motores
- Xilinx aumenta el rendimiento de RFSoC con IP dura de front-end digital para radios 5G
- MÓDULO DE DATOS:pantalla TFT ultraestirada de 23,1 ”con control inteligente
- Maxim:amplificador de detección de corriente bidireccional con rechazo de PWM
- El controlador del motor integra el núcleo Arm Cortex-M0
- Lanner:solución optimizada para virtualización con procesador de múltiples núcleos
- Blog:Wearables médicos con gran rendimiento
- Torno con CNC
- Por qué debería confiar en SEW-Eurodrive para todas sus necesidades de control de motores