


Cómo ha cambiado la tecnología la fabricación de robots
Introducción:Advertencia:esto puede hacerte sentir VIEJO
Mi nombre es Steve Spano, mi primer proyecto de electrónica fue conectar una batería, dos cables y una bombilla de linterna cuando tenía 4 años. Desde los 6 hasta los 16 años, aprendí varios lenguajes de programación (ensamblador, básico e incluso C) en computadoras como Texas Instruments TI-994A, Commodore C64, Amiga 2000 e IBM 386. También construí varios Heathkit. proyectos electrónicos como el kit receptor de radio “Estado Sólido”. ¿Cuántos de ustedes han oído hablar de Heathkit?

Realmente quería el robot Heathkit HERO 1, era increíblemente sofisticado con su detección de objetos por ultrasonido, brazo móvil y unidad de procesamiento central de 8 bits. ¡Incluso vino con un teclado remoto por radio para que pudieras programarlo directamente en ensamblaje hexadecimal! ¿Te imaginas? ¿Programar directamente en hexadecimal con un teclado y sin depurador? ¡El horror! Sorprendentemente, este pequeño robot todavía se vende por $ 1500 US en Ebay. Debería comprar uno, siempre quise uno, ¡y es tan lindo!

Durante muchos años, antes de Internet, si puede imaginar un momento así, incluso ejecuté un servicio "BBS" en un módem de 9600 baudios llamado "Inter-Dimension" donde intercambiábamos mensajes y software Commodore/Amiga. Mi sueño informático en ese momento era ahorrar $ 2000 dólares (una cantidad de dinero increíblemente grande en 1995 para un joven de 16 años) para comprar un disco duro de 10 Megabytes para mi Amiga 2000. Si hubiera podido tener ese disco duro, ¡Hubiera tenido el mejor BBS basado en módem!
Crecí en Scranton, Pensilvania (Estados Unidos) y fui a la escuela de Ingeniería Eléctrica (Universidad de Scranton) y obtuve una Maestría en EE con una concentración en sistemas de control de la Universidad Estatal de Nueva York. Mi primer trabajo en EE después de la escuela fue diseñar hardware para impresoras térmicas utilizadas en cajas registradoras y aplicaciones minoristas. El proyecto principal en mi primer trabajo en EE, en 1998, fue ayudar a actualizar los productos de la empresa desde su CPU Intel de 8 bits a un nuevo procesador de 32 bits y 50 MHz con un bus de memoria de 16 bits. Fue un gran proyecto que involucró equipos de software, hardware e ingeniería mecánica. Mi segundo trabajo en EE fue para una empresa que diseñaba sistemas de red de área de almacenamiento. Esto fue en 2001 y el gran proyecto de esta empresa era ayudar a diseñar una serie de sistemas SAN compatibles con la nueva interfaz Fibre Channel de 2 Gbit/s. ¡Esto fue realmente rápido, 2 Gbit/s en fibra óptica en 2001! ¿Cómo podría la tecnología ser mejor que eso?
Proyecto Superior 1997
Me enteré de la página de ElectronicsLovers en Instagram y los administradores buscaban documentos de "Proyecto senior" para resaltar en su página. No se especificó una fecha, así que pensé en enviar mi trabajo de último año de la universidad de 1997, principalmente como un recordatorio divertido de cómo ha cambiado la tecnología.
Cuando estaba terminando mi BSEE en 1997 en la Universidad de Scranton, nuestro proyecto de último año era diseñar un robot autónomo que pudiera navegar por un laberinto. Inmediatamente pensé en el Heathkit HERO1; ahora podría intentar construir uno en la escuela y un robot mucho más avanzado. Después de todo, el Heathkit HERO1 se basó solo en una CPU Motorola 6808 de 8 bits con 4 KB de RAM (recuadro:las tarjetas de red PCI-Express 1G típicas de hoy en día tienen un búfer de 64 KB a 256 KB solo para paquetes de datos).
La arquitectura de diseño de mi robot utilizó un Intel 87x196KC mucho más avanzado. Esta era una CPU de 16 bits que proporcionaba 32 KB de memoria EEPROM interna para el almacenamiento de programas, pero solo proporcionaba una memoria RAM total de 512 bytes. El compilador "C" generó un código muy poco optimizado que hizo que administrar la pila en 512 bytes fuera un desafío importante, y no había un depurador JTAG en tiempo real ni ningún otro tipo de depurador. Sin embargo, la CPU tenía una serie/UART interna que podía usar para escribir salidas de caracteres simples para determinar qué estaba haciendo el código. Las llamadas de función "C" estándar a printf/sprintf ni siquiera eran compatibles con la CPU porque la memoria RAM era demasiado pequeña.
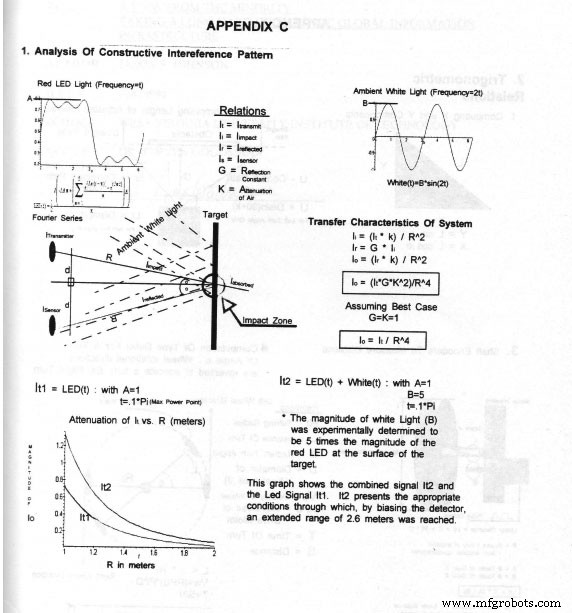
En el desarrollo del robot, se usaron varios circuitos, como controladores FET de control de motores, para permitir el control de la CPU sobre una serie de motores de 12 V CC para que el robot pudiera moverse en una habitación. Se construyó un sistema crudo "Lidar" utilizando un LED láser, un espejo y un detector. Esto permitió obtener una imagen de una vista simple de "1 bit" de la habitación delante del robot. También utilizo el término "imagen" muy vagamente. Se creó un mapa simple de "encendido/apagado" para obstáculos en aproximadamente 32 bytes de memoria. Luego, el código de la CPU intentaría determinar si el robot se estaba moviendo hacia un hueco o una pared en el laberinto por el que intentaba navegar. Durante la competencia, el robot pudo navegar el laberinto con éxito. Incluso escribí un artículo sobre el diseño del robot y ganó el segundo lugar en el Concurso de artículos para estudiantes del IEEE en 1997 en la Universidad George Washington. El robot funcionó y me dejaron graduarme de Ingeniero Eléctrico.
Proyectos de último año 2018
Recientemente estuve en la Universidad de Scranton como asesor de la industria para ayudar a proporcionar ideas para los cursos en función de lo que la industria puede necesitar y qué habilidades/tecnología son relevantes para los desafíos de ingeniería de hoy. Le pregunté a uno de mis profesores sobre los proyectos de robots y qué están haciendo los estudiantes ahora.
La Universidad de Scranton aún organiza una competencia de robots para sus estudiantes de ingeniería todos los años, pero ahora es una competencia regional y nacional. Los robots que los estudiantes están diseñando son cientos de veces más complejos. Los robots actuales utilizan CPU Arm9/Arm11 como Raspberry PI. Los estudiantes están escribiendo un código "C" que se ejecuta en Linux para interactuar directamente con las cámaras USB-HD, lo que permite la imaginación real en los robots. Combinando Linux, Raspberry PI y la gran cantidad de proyectos de código abierto disponibles a través de GIT y Google, los estudiantes tienen acceso a algoritmos de detección y reconocimiento de imágenes. Durante el desarrollo de los proyectos de robots actuales, los estudiantes pueden descargar algoritmos de código abierto, depurarlos con monitores Ethernet remotos que les permiten ver cada variable y ejecutar su código de un solo paso para la depuración. Luego, los estudiantes pasan más tiempo desarrollando algoritmos de navegación muy inteligentes para tratar de darle a su robot una mejor ventaja durante la competencia.
Después de escuchar esto, inmediatamente respondí “¡Qué injusto!”. En mi época, teníamos que almacenar una imagen completa en 32 bytes y codificar a mano un administrador de pila para permitir que nuestro código se ejecutara incluso con los 512 bytes de RAM que nos proporcionaron. Por supuesto, Raspberry PI ni siquiera es el "pico" de la tecnología actual, pero está años luz más allá de cualquier cosa disponible en 1997. No solo el hardware es más sofisticado, sino que los entornos de depuración y desarrollo permiten a los estudiantes centrarse en el diseño. en lugar de luchar con problemas de memoria. Sin embargo, algunas cosas siguen siendo las mismas. El robot todavía tiene que moverse. Aunque los estudiantes tienen acceso a algunas CPU de gama alta, todavía tienen que obtener un puerto de 3,3 V en un proceso para encender/apagar un motor de 12 VCC. Esto lleva a los estudiantes de vuelta al diseño de circuitos para transistores y FET, aprenden cómo funcionan estos componentes básicos y permiten que sus robots se muevan.
Sonreí y dije que los conceptos básicos aún se aplican, y los estudiantes lo reconocen. La electrónica sofisticada todavía se basa en el funcionamiento fundamental de los transistores individuales; tal vez uno en el exterior de una CPU encienda un motor, o 5 billones de ellos en el interior de una CPU para procesar una imagen y un código de navegación.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Entonces, ¿qué sigue?
Mi tercer "trabajo", que todavía tengo hoy, es administrar mi propio negocio de consultoría de electrónica y software. Empecé un negocio de consultoría en 2001 y definitivamente ha estado lleno de trabajo y actividades inesperadas. He empleado directamente a más de una docena de personas y hemos trabajado en proyectos de hardware y software que van desde el diseño de la fuente de alimentación, el controlador de la impresora, el procesamiento de imágenes, los dispositivos de red, las unidades de disco duro y la criptografía. Personalmente, planeo centrarme más en mi favorito. elemento tecnológico:Xilinx FPGA.
Los dispositivos FPGA modernos, como la serie Kintex/Atrix, reúnen las mejores partes del desarrollo de hardware y software; hardware reconfigurable, software reconfigurable y depuración simultánea. Un proyecto en particular en el que he estado trabajando es para un espectrómetro de masas. En este diseño en particular, hubo muchas limitaciones en cuanto a la velocidad y la recopilación de datos. Una parte de la solución fue "simplemente agregue otro núcleo de procesador". Casi como por arte de magia, un dispositivo de un solo núcleo debido a un dispositivo de doble núcleo que permite la partición de tareas de limpieza y funciones críticas de tiempo. La capacidad de reconfigurar un dispositivo físico, como un FPGA, con núcleos de procesador adicionales hubiera sido difícil de concebir en 1997. Los dispositivos FPGA modernos le permiten hacer esto todo el tiempo ahora.
Planeo regresar a la Universidad de Scranton a finales de este año para hablar con algunos de los estudiantes sobre los proyectos actuales de FPGA. Me enfocaré más en ellos en mi trabajo; tal vez en el futuro, podré asesorar a nuevos ingenieros a medida que comienzan a comenzar el primer trabajo de su nueva carrera. PD Una “puntuación” son 20 años. Tuve que buscar eso de nuevo. Soy ingeniero, no mayor de inglés.
Apéndice A:extractos de My Robot Paper o
“Cómo han cambiado los tiempos”
Este artículo ha sido escrito por el Sr. Spano, él es parte de nuestro equipo. Haga clic aquí si desea leer su biografía.
Tecnología Industrial
- ¿Cómo se descubrió el vanadio?
- ¿Cómo se usa el platino?
- ¿Cómo proteger la tecnología en la nube?
- Cómo hacer una plataforma de robot Arduino + Raspberry Pi
- ¿Cómo la tecnología moderna ha transformado los métodos de tallado de huevos de Pascua?
- Robot "artístico" en NPE
- 9 leyes de la tecnología que cambiaron el mundo
- Cómo las máquinas CNC han cambiado la fabricación
- Cómo deberían invertir los proveedores de logística en tecnología
- ¿Cómo ha cambiado nuestras vidas una fresadora CNC?
- Michael Loggins