


Motores síncronos
Motores síncronos monofásicos
Los motores síncronos monofásicos están disponibles en tamaños pequeños para aplicaciones que requieren una sincronización precisa, como cronometraje, (relojes) y reproductores de cintas. Aunque los relojes regulados de cuarzo que funcionan con baterías están ampliamente disponibles, la variedad que funciona con línea de CA tiene una mejor precisión a largo plazo, durante un período de meses.
Esto se debe a que los operadores de las centrales eléctricas mantienen deliberadamente la precisión a largo plazo de la frecuencia del sistema de distribución de CA. Si se retrasa unos pocos ciclos, recuperarán los ciclos perdidos de CA para que los relojes no pierdan tiempo.
Motores síncronos grandes frente a pequeños
Por encima de 10 caballos de fuerza (10 kW), la mayor eficiencia y el factor de potencia líder hacen que los grandes motores síncronos sean útiles en la industria. Los motores síncronos grandes son un pequeño porcentaje más eficientes que los motores de inducción más comunes, aunque el motor síncrono es más complejo.
Dado que los motores y los generadores son similares en construcción, debería ser posible usar un generador como motor y, a la inversa, usar un motor como generador.
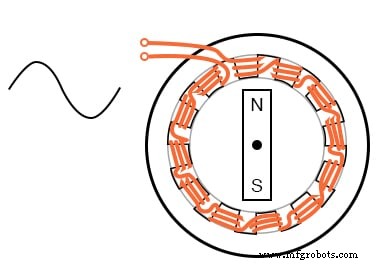
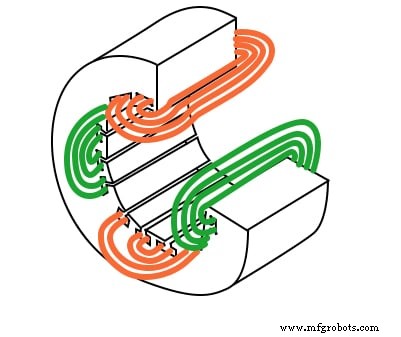
Un motor asíncrono es similar a un alternador con un campo giratorio. La siguiente figura muestra pequeños alternadores con un campo giratorio de imán permanente. La siguiente figura podría ser dos alternadores sincronizados y en paralelo impulsados por fuentes de energía mecánica, o un alternador que impulsa un motor síncrono. O podrían ser dos motores, si se conectara una fuente de alimentación externa.
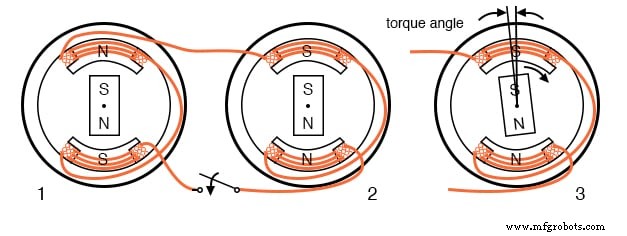
El punto es que, en cualquier caso, los rotores deben funcionar a la misma frecuencia nominal y estar en fase entre sí. Es decir, deben estar sincronizados . El procedimiento para sincronizar dos alternadores es (1) abrir el interruptor, (2) impulsar ambos alternadores a la misma velocidad de rotación, (3) avanzar o retrasar la fase de una unidad hasta que ambas salidas de CA estén en fase, (4) cerrar el interruptor antes de que se desfasen.
Una vez sincronizados, los alternadores se bloquearán entre sí, lo que requerirá un par de torsión considerable para soltar una unidad (fuera de sincronización) de la otra.
Motor síncrono funcionando al mismo ritmo que el alternador
Contabilización del par con motores síncronos
Si se aplica más par en la dirección de rotación al rotor de uno de los alternadores rotativos anteriores, el ángulo del rotor avanzará (opuesto a (3)) con respecto al campo magnético en las bobinas del estator mientras aún están sincronizados y el El rotor entregará energía a la línea de CA como un alternador.
El rotor también avanzará con respecto al rotor del otro alternador. Si se aplica una carga como un freno a una de las unidades anteriores, el ángulo del rotor retrasará el campo del estator como en (3), extrayendo energía de la línea de CA, como un motor.
Si se aplica un par o arrastre excesivo, el rotor excederá el ángulo de par máximo. avanza o se retrasa tanto que se pierde la sincronización. El par se desarrolla solo cuando se mantiene la sincronización del motor.
Mejorando la velocidad de los motores síncronos
En el caso de un pequeño motor síncrono en lugar del alternador, no es necesario pasar por el elaborado procedimiento de sincronización para alternadores. Sin embargo, el motor síncrono no arranca automáticamente y aún debe llevarse a la velocidad eléctrica aproximada del alternador antes de que se bloquee (sincronice) con la velocidad de rotación del generador.
Una vez que alcance la velocidad, el motor síncrono mantendrá el sincronismo con la fuente de alimentación de CA y desarrollará el par.
La onda sinusoidal impulsa el motor síncrono
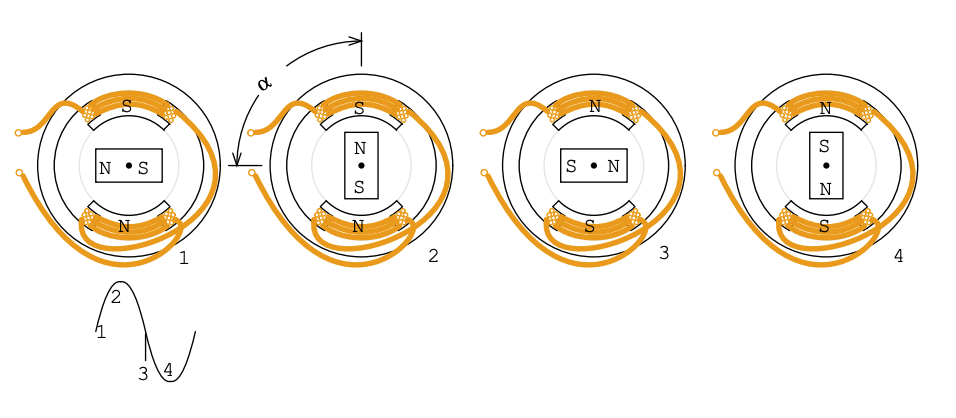
Suponiendo que el motor alcanza la velocidad síncrona, a medida que la onda sinusoidal cambia a positiva en la Figura anterior (1), la bobina norte inferior empuja el polo norte del rotor, mientras que la bobina superior sur atrae ese polo norte del rotor. De manera similar, el polo sur del rotor es repelido por la bobina superior sur y atraído por la bobina inferior norte.
En el momento en que la onda sinusoidal alcanza un pico en (2), el par que sostiene el polo norte del rotor hacia arriba es máximo. Este par disminuye a medida que la onda sinusoidal disminuye a 0 VCC en (3) con el par al mínimo.
A medida que la onda sinusoidal cambia a negativa entre (3 y 4), la bobina inferior sur empuja el polo sur del rotor, mientras atrae el polo norte del rotor. De manera similar, el polo norte del rotor es repelido por la bobina norte superior y atraído por la bobina sur inferior. En (4) la onda sinusoidal alcanza un pico negativo con el par de retención nuevamente en un máximo. A medida que la onda sinusoidal cambia de negativo a 0 VCC a positivo, el proceso se repite para un nuevo ciclo de onda sinusoidal.
Tenga en cuenta que la figura anterior ilustra la posición del rotor para una condición sin carga (α =0 °). En la práctica real, cargar el rotor hará que el rotor se retrase en las posiciones mostradas por el ángulo α. Este ángulo aumenta con la carga hasta que se alcanza el par motor máximo en α =90 °.
La sincronización y el par se pierden más allá de este ángulo. La corriente en las bobinas de un motor síncrono monofásico pulsa mientras alterna la polaridad.
Si la velocidad del rotor de imán permanente está cerca de la frecuencia de esta alternancia, se sincroniza con esta alternancia. Dado que el campo de la bobina pulsa y no gira, es necesario acelerar el rotor de imán permanente con un motor auxiliar. Este es un pequeño motor de inducción similar a los de la siguiente sección.
La adición de postes de campo disminuye la velocidad
Un alternador de 2 polos (par de polos N-S) generará una onda sinusoidal de 60 Hz cuando se gira a 3600 rpm (revoluciones por minuto). Las 3600 rpm corresponden a 60 revoluciones por segundo. Un motor síncrono de imán permanente de 2 polos similar también girará a 3600 rpm.
Se puede construir un motor de menor velocidad agregando más pares de polos. Un motor de 4 polos giraría a 1800 rpm, un motor de 12 polos a 600 rpm. El estilo de construcción que se muestra (Figura anterior) es para ilustración. Los motores síncronos de estator multipolares de mayor torsión y mayor eficiencia en realidad tienen múltiples polos en el rotor.

Motor síncrono de 12 polos de un devanado
En lugar de enrollar 12 bobinas para un motor de 12 polos, enrolle una sola bobina con doce piezas de polos de acero interdigitadas como se muestra en la Figura anterior. Aunque la polaridad de la bobina se alterna debido a la CA aplicada, suponga que la parte superior está temporalmente al norte y la parte inferior al sur.
Las piezas polares encaminan el flujo sur desde la parte inferior y exterior de la bobina hasta la parte superior. Estos 6-sur están intercalados con pestañas de 6-norte dobladas hacia arriba desde la parte superior de la pieza polar de acero de la bobina. Por lo tanto, una barra de rotor de imán permanente encontrará pares de 6 polos correspondientes a 6 ciclos de CA en una rotación física de la barra magnética.
La velocidad de rotación será 1/6 de la velocidad eléctrica del AC. La velocidad del rotor será 1/6 de la experimentada con un motor síncrono de 2 polos. Ejemplo:60 Hz haría girar un motor de 2 polos a 3600 rpm o 600 rpm para un motor de 12 polos.
Reimpreso con permiso de Westclox History en www.clockHistory.com
El estator (Figura anterior) muestra un motor de reloj síncrono Westclox de 12 polos. La construcción es similar a la figura anterior con una sola bobina. El estilo de construcción de una bobina es económico para motores de bajo par. Este motor de 600 rpm acciona engranajes de reducción que mueven las manecillas del reloj.
P: Si el motor Westclox funcionara a 600 rpm desde una fuente de alimentación de 50 Hz, ¿cuántos polos se necesitarían?
A: Un motor de 10 polos tendría 5 pares de polos N-S. Giraría a 50/5 =10 rotaciones por segundo o 600 rpm (10 s-1 x 60 s / minuto).

Reimpreso con permiso de Westclox History en www.clockHistory.com
El rotor (Figura anterior) consta de una barra de imán permanente y una copa de acero para el motor de inducción. La barra del motor síncrono que gira dentro de las pestañas de los polos mantiene la hora exacta. La copa del motor de inducción fuera de la barra magnética encaja en el exterior y sobre las pestañas para que se encienda automáticamente. Hubo un tiempo en que se fabricaban motores sin arranque automático sin la copa del motor de inducción.
Motores síncronos trifásicos
Un motor síncrono trifásico como se muestra en la figura siguiente genera un campo de rotación eléctrica en el estator. Dichos motores no arrancan automáticamente si se arrancan con una fuente de alimentación de frecuencia fija, como 50 o 60 Hz, como se encuentra en un entorno industrial.
Además, el rotor no es un imán permanente para los motores de varios caballos de fuerza (varios kilovatios) utilizados en la industria, sino un electroimán. Los grandes motores síncronos industriales son más eficientes que los motores de inducción. Se utilizan cuando se requiere una velocidad constante. Al tener un factor de potencia adelantado, pueden corregir la línea de CA para un factor de potencia rezagado.
Las tres fases de la excitación del estator se suman vectorialmente para producir un único campo magnético resultante que gira f / 2n veces por segundo, donde f es la frecuencia de la línea eléctrica, 50 o 60 Hz para motores industriales operados por líneas eléctricas. El número de polos es n. Para la velocidad del rotor en rpm, multiplique por 60.
S =f120 / n donde:S =velocidad del rotor en rpm f =frecuencia de línea de CA n =número de polos por fase
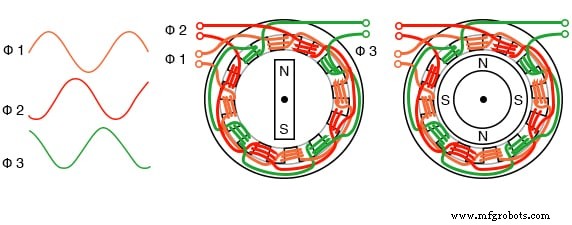
El motor síncrono trifásico de 4 polos (por fase) girará a 1800 rpm con una potencia de 60 Hz o 1500 rpm con una potencia de 50 Hz. Si las bobinas se energizan una a la vez en la secuencia φ-1, φ-2, φ-3, el rotor debe apuntar a los polos correspondientes a su vez.
Dado que las ondas sinusoidales se superponen, el campo resultante rotará, no en pasos, sino suavemente. Por ejemplo, cuando las ondas sinusoidales φ-1 y φ-2 coinciden, el campo estará en un pico apuntando entre estos polos. El rotor de imán de barra que se muestra solo es apropiado para motores pequeños.
El rotor con múltiples polos magnéticos (abajo a la derecha) se usa en cualquier motor eficiente que impulse una carga sustancial. Estos serán electroimanes alimentados por anillos colectores en grandes motores industriales. Los grandes motores síncronos industriales se inician automáticamente mediante conductores de jaula de ardilla integrados en el inducido, que actúan como un motor de inducción.
La armadura electromagnética solo se energiza después de que el rotor alcanza una velocidad casi síncrona.
Motor síncrono trifásico de 4 polos
Motores síncronos multifásicos pequeños
Los pequeños motores síncronos multifásicos se pueden arrancar aumentando la frecuencia de accionamiento desde cero hasta la frecuencia de funcionamiento final. Las señales de excitación multifase son generadas por circuitos electrónicos y serán ondas cuadradas en todas las aplicaciones excepto en las más exigentes.
Estos motores se conocen como motores de CC sin escobillas. Los verdaderos motores síncronos son impulsados por formas de onda sinusoidal. Se puede utilizar un accionamiento bifásico o trifásico suministrando el número apropiado de devanados en el estator. Arriba solo se muestra el trifásico.
Motor síncrono electrónico
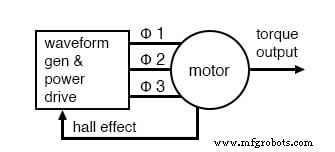
El diagrama de bloques muestra la electrónica del variador asociada con un motor síncrono de baja tensión (12 V CC). Estos motores tienen un sensor de posición integrado dentro del motor, que proporciona una señal de bajo nivel con una frecuencia proporcional a la velocidad de rotación del motor.
El sensor de posición podría ser tan simple como sensores de campo magnético de estado sólido como el efecto Hall dispositivos que proporcionan temporización de conmutación (dirección de la corriente del inducido) a la electrónica del variador. El sensor de posición podría ser un sensor angular de alta resolución, como un resolver, un inductosyn (codificador magnético) o un codificador óptico.
Si se requiere una velocidad de rotación constante y precisa, (como para una unidad de disco) un tacómetro y bucle de bloqueo de fase pueden incluirse (figura siguiente). Esta señal del tacómetro, un tren de pulsos proporcional a la velocidad del motor, se retroalimenta a un bucle de fase bloqueada, que compara la frecuencia y la fase del tacómetro con una fuente de frecuencia de referencia estable, como un oscilador de cristal.
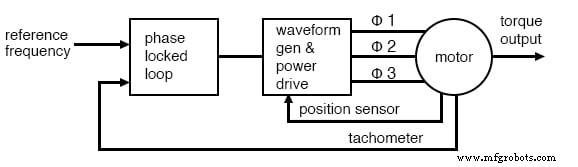
El bucle de fase bloqueada controla la velocidad del motor síncrono
Motor de CC sin escobillas
Un motor impulsado por ondas cuadradas de corriente, proporcionado por sencillos sensores de efecto Hall, se conoce como motor de CC sin escobillas . . Este tipo de motor tiene un par de ondulación más alto. variación a través de una revolución del eje que un motor de onda sinusoidal. Esto no es un problema para muchas aplicaciones. Sin embargo, estamos interesados principalmente en motores síncronos en esta sección.
Par de ondulación del motor y analógico mecánico
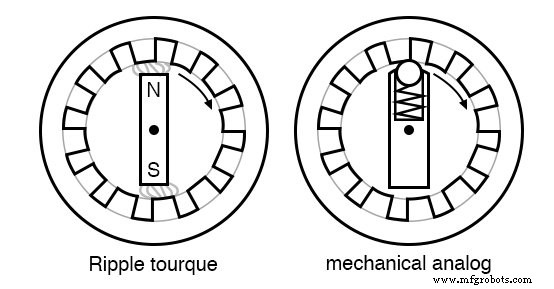
El par de ondulación, o cogging, es causado por la atracción magnética de los polos del rotor a las piezas polares del estator. (Figura anterior) Tenga en cuenta que no hay bobinas de estator. El rotor PM puede girarse a mano, pero encontrará atracción por las piezas polares cuando esté cerca de ellas.
Esto es análogo a la situación mecánica. ¿Sería el par de ondulación un problema para un motor utilizado en un reproductor de cintas? Sí, no queremos que el motor acelere y desacelere alternativamente a medida que pasa la cinta de audio por un cabezal de reproducción de cinta. ¿El par de ondulación sería un problema para un motor de ventilador? No.
Los devanados distribuidos en un cinturón producen un campo más sinusoidal
Si un motor es impulsado por ondas sinusoidales de corriente síncrona con la fem trasera del motor, se clasifica como un motor de CA síncrono, independientemente de si las formas de onda de control se generan por medios electrónicos. Un motor síncrono generará una fem trasera sinusoidal si el campo magnético del estator tiene una distribución sinusoidal.
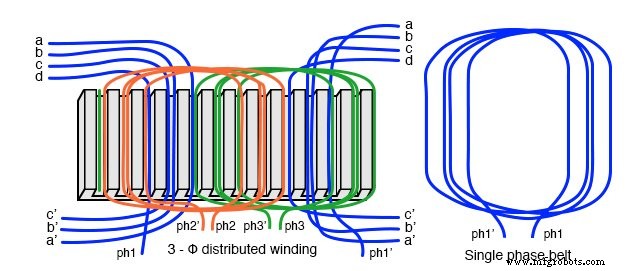
Será más sinusoidal si los devanados de los polos se distribuyen en un cinturón a través de muchas ranuras en lugar de concentrarse en un polo grande (como se muestra en la mayoría de nuestras ilustraciones simplificadas). Esta disposición cancela muchos de los armónicos impares del campo del estator.
Las ranuras que tienen menos devanados en el borde del devanado de fase pueden compartir el espacio con otras fases. Las correas de enrollamiento pueden adoptar una forma concéntrica alternativa, como se muestra en la Figura siguiente.
Cinturones concéntricos
Para un motor de 2 fases, impulsado por una onda sinusoidal, el par es constante a lo largo de una revolución por la identidad trigonométrica:
sin2θ + cos2θ =1
La generación y sincronización de la forma de onda de la unidad requieren una indicación de la posición del rotor más precisa que la proporcionada por los sensores de efecto Hall utilizados en los motores de CC sin escobillas. Un solucionador , o codificador óptico o magnético , proporciona una resolución de cientos a miles de piezas (pulsos) por revolución.
Un resolver proporciona señales analógicas de posición angular en forma de señales proporcionales al seno y coseno del ángulo del eje. Los codificadores proporcionan una indicación de posición angular digital en formato serie o paralelo.
La unidad de onda sinusoidal en realidad puede ser de un PWM, Modulador de ancho de pulso , un método de alta eficiencia para aproximar una onda sinusoidal con una forma de onda digital. Cada fase requiere electrónica de accionamiento para esta forma de onda con desfase en la cantidad adecuada por fase.
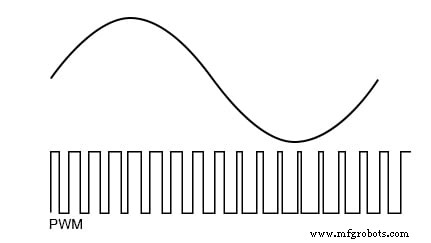
PWM se aproxima a una onda sinusoidal
Beneficios del motor síncrono
La eficiencia del motor síncrono es mayor que la de los motores de inducción. Un motor síncrono también puede ser más pequeño, especialmente si se utilizan imanes permanentes de alta energía en el rotor. El advenimiento de la electrónica moderna de estado sólido hace posible impulsar estos motores a velocidad variable.
Los motores de inducción se utilizan principalmente en la tracción ferroviaria. Sin embargo, un pequeño motor síncrono, que se monta dentro de una rueda motriz, lo hace atractivo para tales aplicaciones. El superconductor de alta temperatura La versión de este motor pesa entre un quinto y un tercio del peso de un motor bobinado de cobre.
El motor síncrono superconductor experimental más grande es capaz de impulsar un barco de clase destructor naval. En todas estas aplicaciones, el accionamiento electrónico de velocidad variable es fundamental. El variador de velocidad también debe reducir el voltaje del variador a baja velocidad debido a la disminución de la reactancia inductiva a una frecuencia más baja.
Para desarrollar el par máximo, el rotor debe retrasar la dirección del campo del estator en 90 °. Más, pierde sincronización. Mucho menos da como resultado un par reducido. Por tanto, es necesario conocer con precisión la posición del rotor. Y la posición del rotor con respecto al campo del estator debe calcularse y controlarse.
Este tipo de control se conoce como control de fase vectorial . Se implementa con un microprocesador rápido que acciona un modulador de ancho de pulso para las fases del estator. El estator de un motor síncrono es el mismo que el del motor de inducción más popular.
Como resultado, el control de velocidad electrónico de grado industrial que se utiliza con los motores de inducción también es aplicable a los grandes motores síncronos industriales. Si se desenrollan el rotor y el estator de un motor síncrono rotativo convencional, se obtiene un motor lineal síncrono.
Este tipo de motor se aplica al posicionamiento lineal preciso de alta velocidad.
HOJA DE TRABAJO RELACIONADA:
- Hoja de trabajo de la teoría del motor de CA
Tecnología Industrial
- Contadores síncronos
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Cómo solucionar problemas de motores de rotor bobinado
- Consejo sobre motores eléctricos:minimiza tus arranques
- Consejo técnico:Motores
- Beneficios de los motores enfriados por líquido
- 7 pasos para garantizar un mejor mantenimiento de los motores eléctricos
- Motores eléctricos de CC y CA:¿cuáles son sus diferencias?
- Automatización y motores BLDC
- Una introducción al motor BLDC