


Registros de cambio:conversión de entrada en serie, salida en paralelo (SIPO)
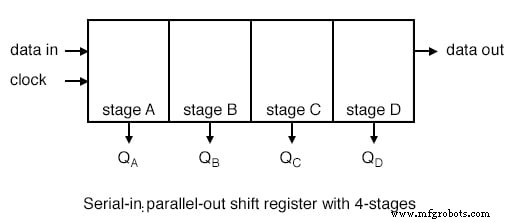
Un registro de desplazamiento de entrada en serie y salida en paralelo es similar al registro de desplazamiento de entrada en serie y salida en serie en el sentido de que traslada datos a elementos de almacenamiento interno y desplaza datos hacia fuera en el pin de salida en serie, salida de datos.
Es diferente en que hace que todas las etapas internas estén disponibles como salidas. Por lo tanto, un registro de desplazamiento de entrada en serie y salida en paralelo convierte los datos del formato en serie al formato paralelo.
Un ejemplo de uso del registro de cambios de entrada en serie y salida en paralelo
Si cuatro bits de datos se desplazan en cuatro pulsos de reloj a través de un solo cable en la entrada de datos, a continuación, los datos están disponibles simultáneamente en las cuatro salidas Q A a Q D después del cuarto pulso del reloj.
La aplicación práctica del registro de desplazamiento de entrada en serie y salida en paralelo es convertir datos de formato serie en un solo cable a formato paralelo en varios cables.
Iluminemos cuatro LED (diodos emisores de luz) con las cuatro salidas ( Q A Q B Q C Q D ).
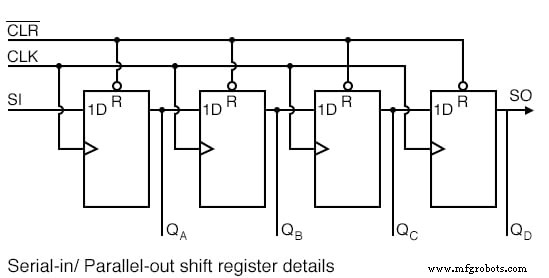
Los detalles anteriores del registro de desplazamiento de entrada en serie y salida en paralelo son bastante simples. Parece un registro de desplazamiento de entrada y salida en serie con taps agregados a cada salida de etapa.
Los datos en serie se desplazan en SI (Entrada serial). Después de un número de relojes igual al número de etapas, el primer bit de datos aparece en SO (Q D ) en la figura anterior.
En general, no hay un pin SO. La última etapa (Q D arriba) sirve como SO y se conecta en cascada al siguiente paquete si existe.
Registro de cambios de entrada en serie, salida en paralelo frente a entrada en serie y salida en serie
Si un registro de desplazamiento de entrada en serie y salida en paralelo es tan similar a un registro de desplazamiento de entrada y salida en serie, ¿por qué los fabricantes se molestan en ofrecer ambos tipos?
¿Por qué no ofrecer simplemente el registro de desplazamiento de entrada en serie y salida en paralelo?
La respuesta es que en realidad solo ofrecen el registro de desplazamiento de entrada en serie y salida en paralelo, siempre que no tenga más de 8 bits.
Tenga en cuenta que los registros de desplazamiento de entrada y salida en serie tienen longitudes superiores a 8 bits de 18 a 64 bits.
No es práctico ofrecer un registro de desplazamiento de entrada en serie y salida en paralelo de 64 bits que requiera tantos pines de salida. Vea las formas de onda a continuación para el registro de desplazamiento anterior.
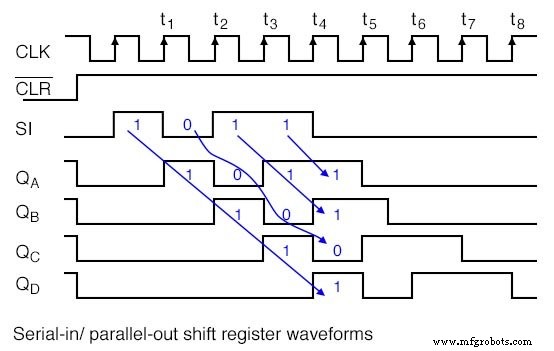
El registro de desplazamiento ha sido borrado antes de cualquier dato por CLR ' , una señal baja activa, que borra todos los Flip-Flops tipo D dentro del registro de desplazamiento.
Tenga en cuenta los datos de serie 1011 patrón presentado en el SI aporte. Estos datos están sincronizados con el reloj CLK .
Este sería el caso si se cambia desde algo así como otro registro de desplazamiento, por ejemplo, un registro de desplazamiento de entrada en paralelo y salida en serie (no se muestra aquí).
En el primer reloj a las t1 , los datos 1 en SI se ha cambiado de D a Q de la primera etapa de registro de desplazamiento. Después de t2 este primer bit de datos está en Q B .
Después de t3 está en Q C . Después de t4 está en Q D . Cuatro pulsos de reloj han desplazado el primer bit de datos hasta la última etapa Q D .
El segundo bit de datos es 0 está en Q C después del cuarto reloj. El tercer bit de datos un 1 está en Q B . El cuarto dato mordió otro 1 está en Q A .
Por lo tanto, el patrón de entrada de datos en serie 1011 está contenido en ( Q D Q C Q B Q A ). Ahora está disponible en las cuatro salidas.
Estará disponible en las cuatro salidas justo después del reloj t 4 hasta justo antes de t 5 .
Estos datos paralelos deben usarse o almacenarse entre estos dos tiempos, o se perderán debido al desplazamiento de la Q D etapa en los siguientes relojes t 5 a t 8 como se muestra arriba.
Dispositivos de entrada en serie y salida en paralelo
Echemos un vistazo más de cerca a los registros de desplazamiento de entrada en serie y salida en paralelo disponibles como circuitos integrados, cortesía de Texas Instruments.
Para obtener las hojas de datos completas del dispositivo, siga los enlaces.
- SN74ALS164A registro de desplazamiento de 8 bits de entrada en serie / salida en paralelo
- Registro de desplazamiento de 8 bits de entrada en serie / salida en paralelo SN74AHC594 con registro de salida
- Registro de desplazamiento de 8 bits de entrada en serie / salida en paralelo SN74AHC595 con registro de salida
- Registro de desplazamiento de 8 bits de entrada en serie / salida en paralelo CD4094 con registro de salida
El 74ALS164A es casi idéntico a nuestro diagrama anterior con la excepción de las dos entradas seriales A y B .
La entrada no utilizada debe elevarse para habilitar la otra entrada. No mostramos todas las etapas anteriores.
Sin embargo, todas las salidas se muestran en el símbolo ANSI a continuación, junto con los números de los pines.
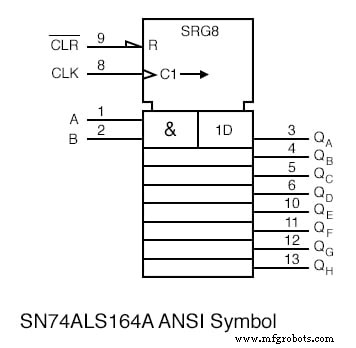
El CLK La entrada a la sección de control del símbolo ANSI anterior tiene dos funciones internas C1 , control de todo lo que tenga el prefijo 1 .
Esto sería registrar datos en 1D . La segunda función, la flecha después de la barra inclinada (/) es el desplazamiento de datos hacia la derecha (abajo) dentro del registro de desplazamiento.
Las ocho salidas están disponibles a la derecha de los ocho registros debajo de la sección de control. La primera etapa es más ancha que las demás para acomodar el A&B entrada.
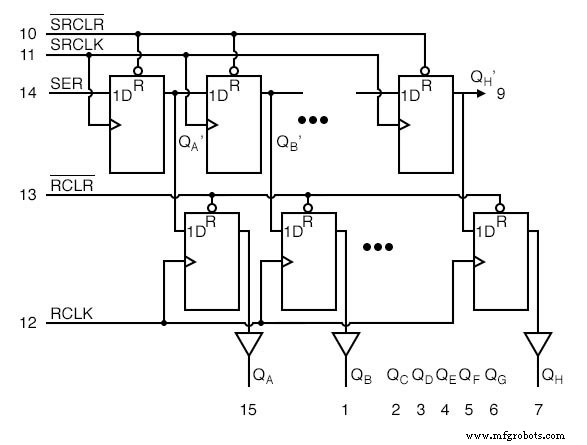
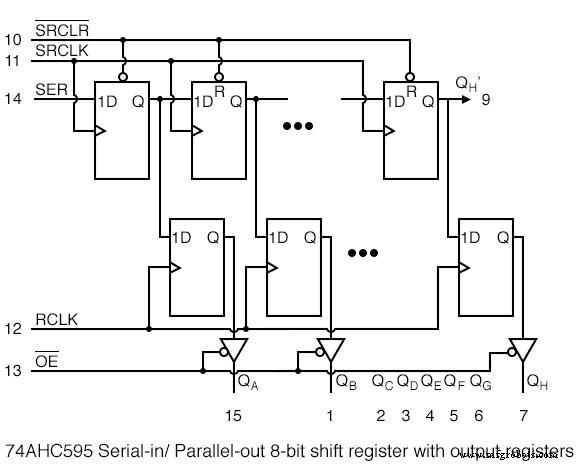
El diagrama lógico interno anterior está adaptado de la hoja de datos de TI (Texas Instruments) para el 74AHC594. Los FF de tipo "D" en la fila superior comprenden un registro de desplazamiento de entrada en serie y salida en paralelo.
Esta sección funciona como los dispositivos descritos anteriormente. Las salidas ( Q A ’Q B " a Q H " ) de la mitad del registro de desplazamiento del dispositivo alimentan en paralelo los FF tipo “D” en la mitad inferior. Q H " (pin 9) se cambia a cualquier paquete de dispositivo en cascada opcional.
Un solo borde de reloj positivo en RCLK transferirá los datos de D a Q de los FF inferiores. Todos los 8 bits se transfieren en paralelo al registro de salida. (una colección de elementos de almacenamiento).
El propósito del registro de salida es mantener una salida de datos constante mientras se transfieren nuevos datos a la sección de registro de desplazamiento superior.
Esto es necesario si las salidas activan relés, válvulas, motores, solenoides, bocinas o zumbadores. Es posible que esta función no sea necesaria cuando se activan los LED siempre que el parpadeo durante el cambio no sea un problema.
Tenga en cuenta que el 74AHC594 tiene relojes separados para el registro de desplazamiento ( SRCLK ) y el registro de salida ( RCLK ). Además, SRCLR puede borrar la palanca de cambios. y el registro de salida por RCLR .
Es deseable poner las salidas en un estado conocido al encender, en particular, si se activan relés, motores, etc. Las formas de onda a continuación ilustran el cambio y el bloqueo de datos.
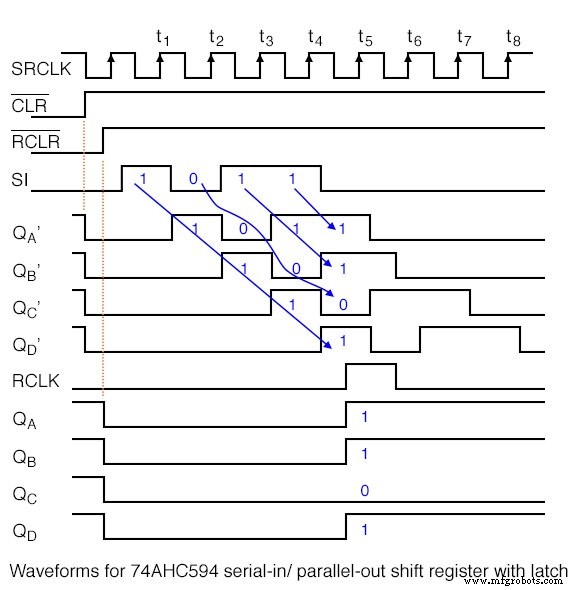
Las formas de onda anteriores muestran el desplazamiento de 4 bits de datos a las primeras cuatro etapas de 74AHC594, luego la transferencia en paralelo al registro de salida.
De hecho, el 74AHC594 es un registro de desplazamiento de 8 bits y se necesitarían 8 relojes para cambiar 8 bits de datos, que sería el modo normal de funcionamiento.
Sin embargo, los 4 bits que mostramos ahorran espacio e ilustran adecuadamente la operación.
Limpiamos el registro de desplazamiento medio reloj antes de t 0 con SRCLR '=0 . SRCLR ’ debe soltarse en alto antes de cambiar.
Justo antes de t 0 el registro de salida se borra con RCLR '=0 . También se publica ( RCLR ’=1 ).
Datos de serie 1011 se presenta en el pin SI entre los relojes t 0 y t 4 . Se desplaza hacia adentro por los relojes t 1 t 2 t 3 t 4 que aparece en las etapas de turno internas Q A ’Q B ’Q C ’Q D " .
Estos datos están presentes en estas etapas entre t 4 y t 5 . Después de t 5 los datos deseados ( 1011 ) no estará disponible en estas etapas de cambio interno.
Entre t 4 y t 5 aplicamos un RCLK positivo transfiriendo datos 1011 para registrar salidas Q A Q B Q C Q D .
Estos datos se congelarán aquí como más datos ( 0 s) cambia durante el siguiente SRCLK s ( t 5 a t 8 ). No habrá ningún cambio en los datos aquí hasta otro RCLK se aplica.
El 74AHC595 es idéntico al '594 excepto que el RCLR' se reemplaza por un OE ’ habilitando un búfer de tres estados en la salida de cada uno de los ocho bits de registro de salida.
Aunque el registro de salida no se puede borrar, las salidas pueden desconectarse mediante OE '=1 .
Esto permitiría que las resistencias externas pull-up o pull-down fuercen cualquier relé, solenoide o controlador de válvula a un estado conocido durante el encendido del sistema.
Una vez que el sistema se enciende y, digamos, un microprocesador ha cambiado y retenido datos en el '595, la habilitación de salida podría afirmarse ( OE' =0 ) para activar los relés, solenoides y válvulas con datos válidos, pero no antes de ese momento.
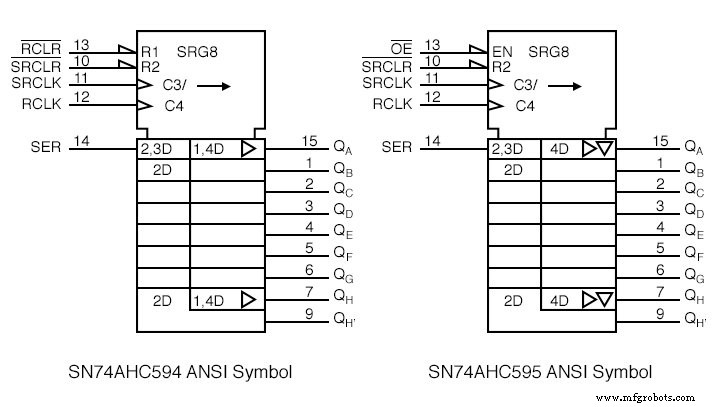
Arriba están los símbolos ANSI propuestos para estos dispositivos. C3 registra los datos en la entrada en serie ( SER externo ) como lo indica el 3 prefijo de 2,3D .
La flecha después de C3 / indica el desplazamiento a la derecha (abajo) del registro de desplazamiento, las 8 etapas a la izquierda del símbolo '595 debajo de la sección de control.
El 2 prefijo de 2,3D y 2D indica que estas etapas se pueden restablecer con R2 ( SRCLR 'externo ).
El 1 prefijo de 1,4D en el ‘594 indica que R1 ( RCLR 'externo ) puede restablecer el registro de salida, que está a la derecha de la sección de registro de desplazamiento.
El ‘595 , que tiene un EN en OE ’ externo no se puede restablecer el registro de salida. Pero, el EN habilita búferes de salida de tres estados (triángulo invertido).
El triángulo que apunta hacia la derecha del ‘594 y ‘595 indica almacenamiento en búfer interno. Tanto el ‘594 y ‘595 Los registros de salida están sincronizados por C4 como lo indica 4 de 1,4D y 4D respectivamente.
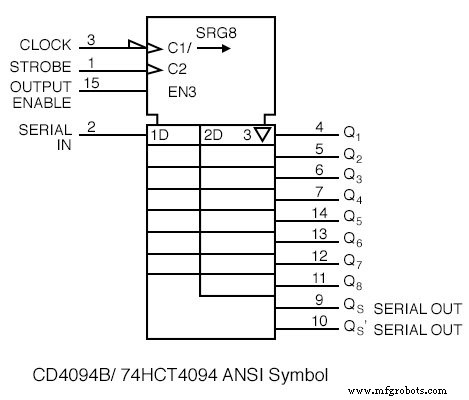
El CD4094B es un DC de 3 a 15 V registro de desplazamiento de enclavamiento capaz alternativo a los dispositivos 74AHC594 anteriores.
RELOJ , C 1, cambia los datos en SERIAL IN como implica el 1 prefijo de 1D .
También es el reloj del registro de desplazamiento de desplazamiento derecho (mitad izquierda del cuerpo del símbolo) como lo indica la / (flecha derecha) de C1 / (flecha) en CLOCK entrada.
ESTROBOSCÓPICO , C2 es el reloj para el registro de salida de 8 bits a la derecha del cuerpo del símbolo. El 2 de 2D indica que C2 es el reloj del registro de salida.
El triángulo invertido en el pestillo de salida indica que la salida está triestada, y está habilitada por EN3 .
El 3 que precede al triángulo invertido y el 3 de EN3 a menudo se omiten, ya que cualquier habilitación ( EN ) se entiende que controla las salidas triestado. Q S y Q S " son salidas no enclavadas de la etapa de registro de desplazamiento.
Q S podría conectarse en cascada a SERIAL IN de un dispositivo sucesivo.
Aplicaciones prácticas
Una aplicación del mundo real del registro de desplazamiento de entrada en serie y salida en paralelo es enviar datos desde un microprocesador a un indicador de panel remoto.
O, otro dispositivo de salida remota que acepta datos en formato serie.
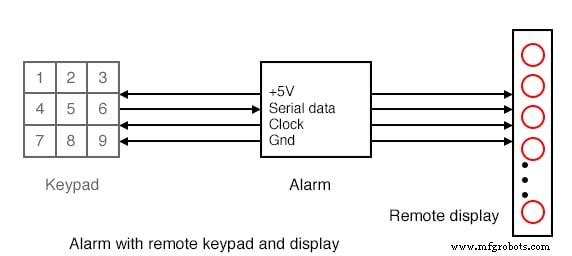
La figura "Alarma con teclado remoto" se repite aquí desde la sección de entrada en paralelo, salida en serie con la adición de la pantalla remota.
Así, podemos visualizar, por ejemplo, el estado de los lazos de alarma conectados a la caja de alarma principal.
Si la alarma detecta una ventana abierta, puede enviar datos en serie a la pantalla remota para informarnos.
Es probable que tanto el teclado como la pantalla estén dentro del mismo gabinete remoto, separados de la caja de alarma principal. Sin embargo, solo veremos el panel de visualización en esta sección.
Si la pantalla estuviera en la misma placa que la alarma, podríamos tender ocho cables a los ocho LED junto con dos cables de alimentación y tierra.
Estos ocho cables son mucho menos deseables a largo plazo para un panel remoto. Al usar registros de desplazamiento, solo necesitamos ejecutar cinco cables:reloj, datos en serie, una luz estroboscópica, energía y tierra.
Si el panel estuviera a solo unos centímetros de la placa principal, aún podría ser conveniente reducir la cantidad de cables en un cable de conexión para mejorar la confiabilidad.
Además, a veces usamos la mayoría de los pines disponibles en un microprocesador y necesitamos usar técnicas en serie para expandir el número de salidas.
Algunos dispositivos de salida de circuitos integrados, como los convertidores de digital a analógico, contienen registros de desplazamiento de entrada en serie y salida en paralelo para recibir datos de microprocesadores.
Las técnicas ilustradas aquí son aplicables a esas partes.
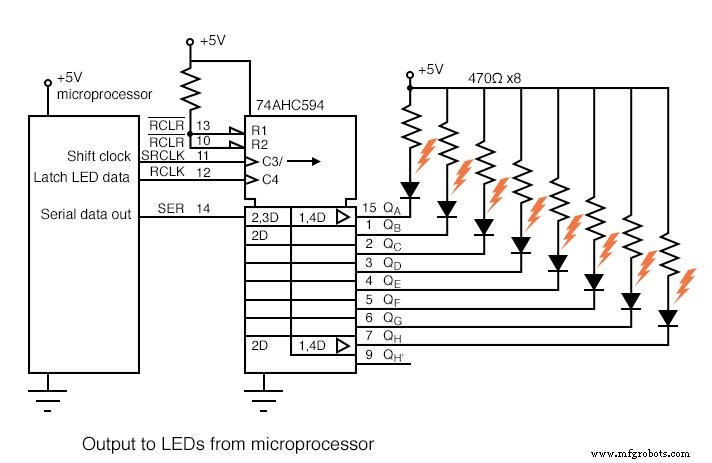
Hemos elegido el registro de desplazamiento de entrada en serie y salida en paralelo 74AHC594 con registro de salida; sin embargo, requiere un pin adicional, RCLK , para cargar en paralelo los datos desplazados a los pines de salida.
Este pin adicional evita que las salidas cambien mientras los datos ingresan. Esto no es un gran problema para los LED. Pero sería un problema si los relés, válvulas, motores, etc.
El código ejecutado dentro del microprocesador comenzaría con la salida de 8 bits de datos. Se emitirá un bit en el pin "Salida de datos en serie", lo que conduciría a SER del control remoto 74AHC594.
A continuación, el microprocesador genera una transición de baja a alta en el "reloj de cambio", lo que genera SRCLK del registro de desplazamiento 595.
Este reloj positivo cambia el bit de datos a SER de "D" a "Q" de la primera etapa de registro de desplazamiento.
Esto no tiene ningún efecto en la Q A LED en este momento debido al registro de salida interno de 8 bits entre el registro de desplazamiento y los pines de salida ( Q A a Q H ).
Finalmente, el microprocesador reduce el "reloj de cambio". Esto completa el cambio de un bit al '595.
El procedimiento anterior se repite siete veces más para completar el desplazamiento de 8 bits de datos del microprocesador al registro de desplazamiento de entrada en serie y salida en paralelo 74AHC594.
Para transferir los 8 bits de datos dentro del registro de desplazamiento interno '595 a la salida se requiere que el microprocesador genere una transición de bajo a alto en RCLK , el reloj del registro de salida.
Esto aplica nuevos datos a los LED. El RCLK debe reducirse en previsión de la próxima transferencia de datos de 8 bits.
Los datos presentes en la salida del '595 permanecerán hasta que el proceso de los dos párrafos anteriores se repita para nuevos 8 bits de datos.
En particular, los datos nuevos se pueden cambiar al registro de desplazamiento interno del '595 sin afectar a los LED. Los LED solo se actualizarán con nuevos datos con la aplicación del RCLK borde ascendente.
¿Qué pasa si necesitamos manejar más de ocho LED? Simplemente conecte en cascada otro 74AHC594 SER fijar a la Q H " de la palanca de cambios existente.
Paralelo al SRCLK y RCLK patas. El microprocesador necesitaría transferir 16 bits de datos con 16 relojes antes de generar un RCLK alimentando ambos dispositivos.
Los indicadores LED discretos, que mostramos, podrían ser LED de 7 segmentos. Sin embargo, existen dispositivos LSI (integración a gran escala) capaces de manejar varios dígitos de 7 segmentos.
Este dispositivo acepta datos de un microprocesador en un formato en serie, impulsando más segmentos de LED que pines al multiplexar los LED.
HOJAS DE TRABAJO RELACIONADAS:
- Hoja de trabajo de registros de turnos
Tecnología Industrial
- Cambio de fase
- Conversión de octal y hexadecimal a decimal
- Conversión de numeración decimal
- Introducción a los registros de turno
- Registros de cambio:entrada en serie, salida en serie
- Conversión de tipo C#
- La pandemia está acelerando el cambio a la impresión 3D
- C# - Conversión de tipo
- Revestimiento de conversión de película química para chapa metálica
- Conversión de estrella a delta y delta a estrella. Transformación Y-Δ
- ¿Qué es el revestimiento de pasivación y conversión? CNCLATHING Servicios de acabado de superficies