


Ciudades inteligentes:el caso de LIDAR en los sistemas de transporte inteligentes
Un aspecto de la agenda de las ciudades inteligentes es el despliegue de sistemas de transporte inteligentes. Un proyecto piloto que utiliza sensores lidar en la Agencia de Transporte Municipal de San Francisco (SFMTA) ha demostrado cómo lidar ha proporcionado una solución para el piloto de señales de tráfico inteligentes de la ciudad, una parte de la política Vision Zero de San Francisco.
El objetivo de la política de Visión Cero de la ciudad es mejorar la seguridad vial, ya que se estima que cada año unas 30 personas pierden la vida y más de 200 más resultan gravemente heridas mientras transitan por las calles de San Francisco. El objetivo del piloto de señales de tráfico inteligentes dentro de este marco más amplio era explorar el uso del uso de sistemas de señales de tráfico inteligentes multimodales (MMITSS), comunicación dedicada de corto alcance (DSRC), prioridad de señal de tránsito (TSP) y preferencia de vehículos de emergencia (EVP). ) tecnología para dar prioridad a los vehículos de emergencia y tránsito. Además, el MMITSS también debería poder detectar peatones y bicicletas para proporcionarles intervalos de avance, codificaciones y / o fases protegidas.
La primera prueba de concepto que finalizó en enero de 2020 implementó sensores lidar en cinco intersecciones y demostró la capacidad de perfilar datos de forma precisa y anónima, con una precisión del 96%. La segunda prueba de concepto espera agregar la capa de datos a la red de control de señales para habilitar la "inteligencia" en ITS; esto está en marcha y se espera que finalice a principios de 2021.
Hablamos dos personas involucradas que arrojaron algo de luz sobre la tecnología, su despliegue y los resultados obtenidos, y aquí presentamos lo más destacado de las conversaciones. En primer lugar, hablamos con el director de marketing del proveedor de tecnología de sensores lidar Quanergy, Enzo Signore. Luego profundizamos en el proyecto de prueba de concepto real con Paul Hoekstra, quien fue el consultor independiente de ejecución de estrategias para el proyecto con SFMTA.
Lidar:seguimiento de ID de objetos de forma anónima
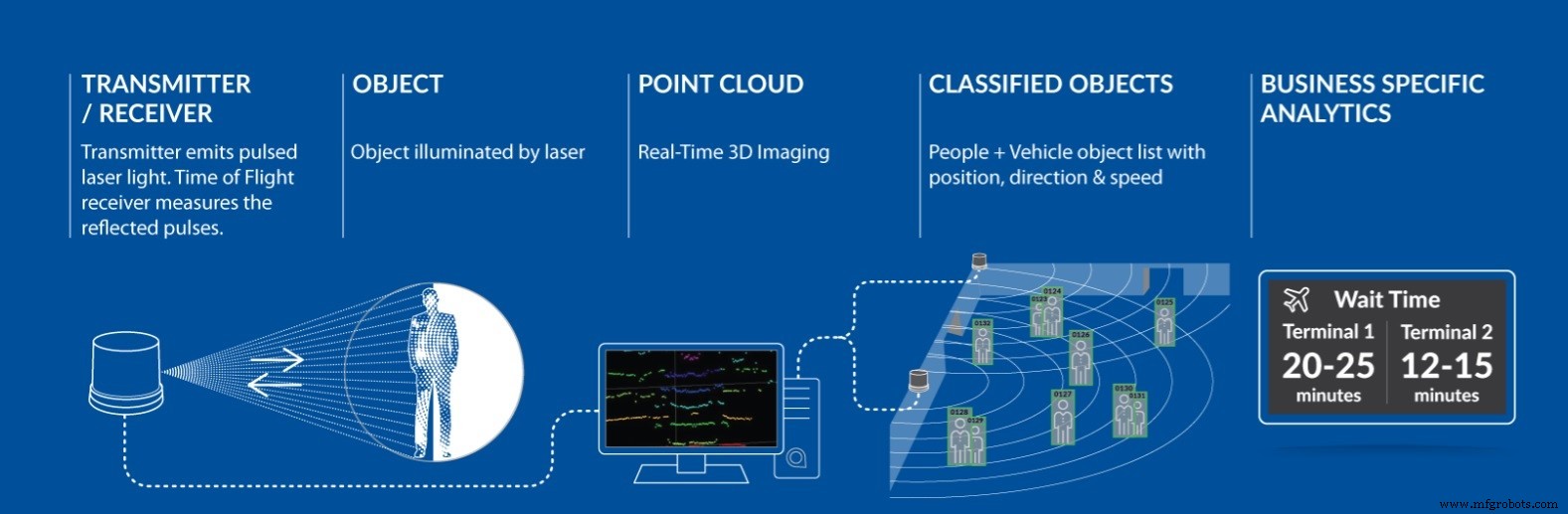
Enzo Signore de Quanergy explica el beneficio de la tecnología LIDAR en este tipo de aplicación, que requiere el conteo de personas y vehículos y la gestión del flujo, y especialmente con la prohibición del reconocimiento facial.
La propuesta de valor clave para la tecnología lidar en aplicaciones como estadios y ciudades inteligentes es la capacidad de rastrear de forma anónima un objeto que viaja a través de varios puntos de sensores. Por ejemplo, un automóvil atravesaría muchas intersecciones o un peatón atravesaría muchas áreas. Lo que puede hacer Quanergy es asignar una identificación a un objeto, y esa identificación permanecerá con el objeto durante todo el viaje en el área que se está monitoreando.
Esto es muy complejo de hacer, porque cuando atraviesa múltiples intersecciones, necesita múltiples sensores y múltiples servidores para el cómputo de borde. La mayoría de las tecnologías tendrían una vista en silos solo del área que están administrando, y al cruzar el límite entre un área y la otra, se perderá la identificación y se le dará otra identificación. Con este enfoque, comienza a perder la pista de todo el flujo de personas.
Contamos con una tecnología llamada traspaso automático de identificación, que pasará la identificación de la persona o del vehículo, de un área a otra. Entonces, mientras tengamos campo de visión, la misma ID permanecerá con el objeto. Esto proporciona una muy buena visibilidad y seguimiento de un extremo a otro. Esto puede ser importante para los aeropuertos, por ejemplo, desde la acera hasta la puerta, donde podría optimizar la experiencia de los pasajeros, y para los centros comerciales y las ciudades. La identificación única para cada individuo ayuda a habilitar el análisis de un extremo a otro.
Los sensores de Quanergy, la serie M, proporcionan detección de largo alcance, como el MQ-8, diseñado específicamente para aplicaciones de gestión de flujo. Así es como estos sensores son diferentes. Los sensores lidar típicos tienen una configuración de haz simétrico. Si monta el sensor en posición plana, normalmente la mitad del haz irá al cielo y la otra mitad al suelo. Si está montado a 3 metros de altura en un poste de luz de la calle mirando hacia abajo en busca de la vista peatonal, entonces en esta configuración, la mitad del haz se desperdicia.
En nuestro diseño, todos los haces apuntan hacia abajo, lo que permite tener una cobertura simétrica del suelo. Eso significa que no hay puntos ciegos cuando una persona camina por el campo de visión. Esto le da la capacidad de rastrear sin interrupción a una persona o vehículo en cualquier lugar del campo de visión. Podemos ver un objeto hasta un rango de 70 m (es decir, 15.000 metros cuadrados). Esta es un área muy grande que, de otro modo, necesitaría muchas cámaras para lograr una cobertura similar. Por lo tanto, esto reduce la cantidad de sensores y también el costo.
Superar problemas de privacidad relacionados con el reconocimiento facial
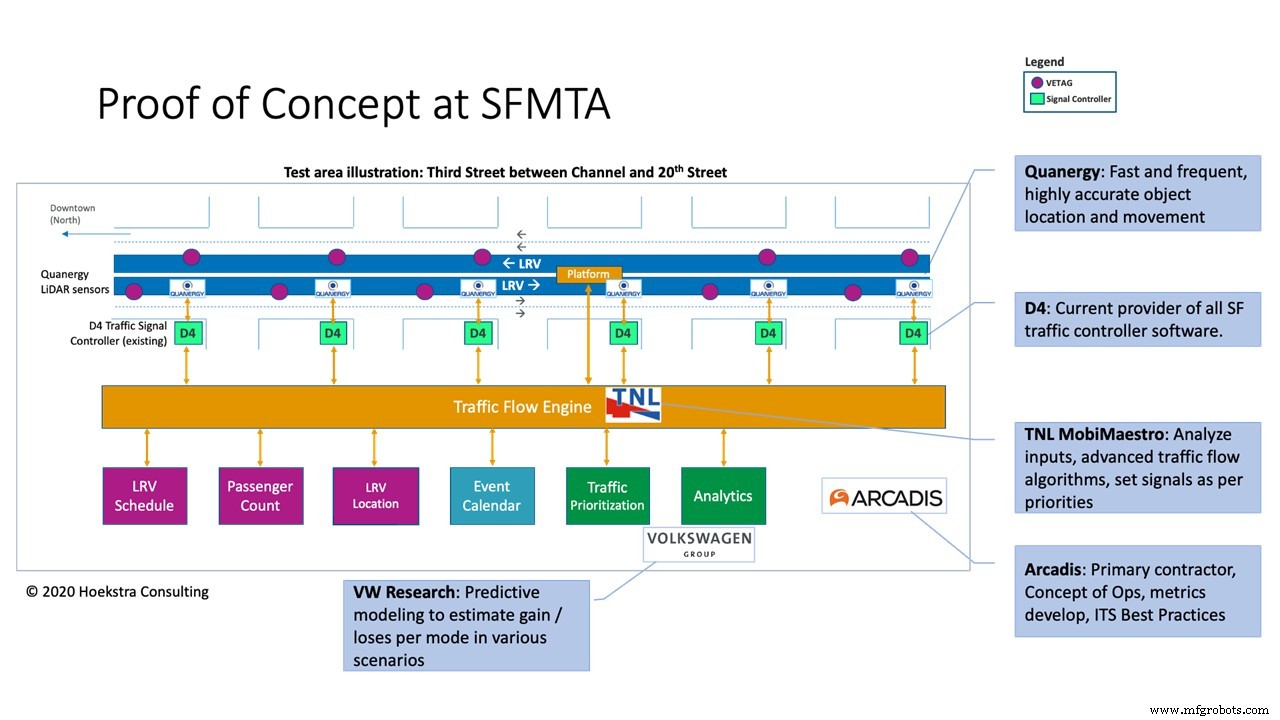
Paul Hoekstra, para SMTA , describe el pensamiento detrás de la implementación y el resultado de la primera prueba de concepto (PoC) en cinco intersecciones en 3 rd Street y planes para ampliar la cobertura.
Comenzamos a trabajar con SFMTA, Cisco y Quanergy como socios en este proyecto en abril de 2019. Inicialmente, como parte del paquete de Cisco, teníamos sensores DSRC. Descubrimos que los estábamos usando solo para escuchar a todos los autos en el pasillo y en la autopista que estábamos cubriendo. Descubrimos que menos del 1% de todos los automóviles transmiten realmente esa señal DSRC. Desde la perspectiva de este caso de uso, la conclusión debe ser que no puede usar DSRC para medir el flujo de tráfico. Simplemente no es lo suficientemente importante como para tomar decisiones.
En este momento, hemos completado la primera (PoC) con sensores Quanergy y ahora estamos en el medio de la segunda PoC.
Con el primer PoC, tomamos 20 sensores lidar y los instalamos en cinco intersecciones en 3 rd Street, cerca del nuevo estadio de baloncesto que abrió el año pasado. Tuvimos cómputo de borde con Cisco TRX ejecutando el software Quanergy QORTEX. Los datos del lidar pasan por la caja TRX y el software Qortex publica los datos en la red, que irá al centro de datos, un pequeño clúster de VM que ejecuta la plataforma Cisco Kinetic que almacena todos los mensajes, todos los 30 millones por semana.
Todos los domingos se publican informes sobre él, uno para los vehículos, identificando el vehículo por la identificación lidar en la intersección, con un montón de atributos, como la hora, el día de la semana, de dónde vino, a dónde fue, con qué frecuencia hubo una parada, cuánto tiempo duró la parada, cuál fue la velocidad, hubo un evento (del calendario de eventos). De esta forma, podríamos conectar todas las intersecciones y seguir a los vehículos por el pasillo. Y luego podríamos decir cosas como, "esta es la cantidad que entró en dirección norte por el lado sur del corredor, y luego cuántos se apagaron, y así sucesivamente".
Con QORTEX de Quanergy lo hemos calibrado y hemos logrado una precisión del 96%. No puede simplemente contar ID con el LIDAR; tiene que crear lógica para asegurarse de que la misma ID esté en la salida que en la entrada. Con esa lógica podemos seguir a los autos por la intersección. Tenemos una lógica que define qué es una parada. Por lo tanto, ese 96% de precisión es donde terminamos, es muy preciso. Para los peatones, con las zonas que definimos, se puede ver si la persona está dentro o fuera de la acera. Puede ver si una persona está dentro o fuera de los límites de un paso de peatones. Puede ver qué tan cerca estaba un automóvil de la persona. Con ese tipo de datos, podemos crear informes de cuasi accidentes. Hemos definido lo que son los cuasi accidentes:los vectores, la velocidad, y luego calculamos el tiempo para que colisionen, y si está en un cierto rango, entonces lo llama un cuasi accidente.
Esto solo es posible porque los datos que provienen de QORTEX son tan precisos que podemos ver sin tener que identificar a nadie. No almacenamos ninguna información personal identificable. Una persona es solo un punto. Y un auto es solo una cuadra, no sabes qué tipo de auto es. Clasificamos según el tamaño.
El primer PoC tuvo que ver con el análisis. En el segundo estamos ampliando el número de intersecciones. Así que ahora tenemos cinco y vamos a pasar al 10. En otras palabras, un corredor más grande.
Luego, colocaremos en capas todos los datos que actualmente están bloqueados dentro de los gabinetes. En los gabinetes hay un controlador de señal y en el controlador hay muchos actuadores. Estos podrían ser la detección de bucle de un vehículo, un botón para peatones o sensores en la vía del tren ligero. Hay una priorización de señales de tráfico. Todo esto se encuentra en el controlador de señal integrado.
Entonces, lo que estamos haciendo ahora es permitir el intercambio de información bidireccional con los controladores de señales, tomando todos los datos de las intersecciones, como los datos LIDAR y la clasificación de objetos (nuevamente completamente anónimos), en las plataformas y las paradas de autobús. La clasificación de objetos de esos sensores (que se procesa todo en los sensores), nos dará la cantidad de personas, así como su clasificación; por ejemplo, ¿hay alguien en una silla de ruedas, hay personas que empujan un cochecito o están tener una bicicleta. Muchos de estos factores determinarán el tiempo de permanencia del vehículo de tránsito. Queremos saber el tiempo de permanencia previsto en función de la cantidad de personas que hay allí.
Del sistema de back-end vamos a tomar la cantidad de vehículos. Y luego, con los análisis, podemos determinar si necesitamos, digamos, 20 segundos de tiempo de permanencia o 32 segundos de tiempo de permanencia. Luego podemos extrapolar las 10 intersecciones,
Tratar todo el corredor de transporte como una red
Para optimizar todo el corredor, no podemos hacerlo sin saber con precisión dónde están las personas y los vehículos y por cuánto tiempo. Esto significa que tratamos a todo el corredor como una red, no como un nodo individual. Esto significa que ejecutamos los algoritmos con alta frecuencia, y ahora estamos debatiendo si necesitamos ir más rápido que 1 hercio, recalculamos todo cada segundo.
Entonces le decimos al controlador de señal que se pondrá verde en dirección norte. Eso cierra el ciclo. Al aprender del trabajo de la cadena de suministro de Cisco, sabe que esa es la única forma en que puede mover cosas a través de la intersección. Toda la tecnología está disponible, pero solo optimiza todos los silos. De esta manera, estamos dando un gran paso adelante con un nuevo paradigma, de gestión integrada del tráfico.
Ya hay 7.000 cámaras en San Francisco. Pero las cámaras solo te dan una imagen en 2D. La precisión de la ubicación es menos precisa de lo que puede lograr con lidar. Lidar siempre funciona, bajo la lluvia, por la noche. Y se mantiene muy alejado de los problemas de privacidad. En el momento en que las personas saben que están siendo rastreadas, o que pueden ser reconocidas, surge el problema de que las personas no confían en que el gobierno las proteja.
Los resultados de este proyecto son permitir que los vehículos de emergencia tengan prioridad cuando se enfrentan a emergencias, optimizando los tiempos de tránsito y las paradas, e incluso colocando automóviles en fila si no hay transporte público disponible, para moverlos de manera más efectiva a través del corredor.
Sensor
- Defensa de los chips neuromórficos para la informática de IA
- El caso de C-suite para DDMRP
- Wi-Fi:La solución mágica para Smart Everything
- Aprovechar el poder de las ciudades inteligentes para un futuro más brillante
- El caso para llevar a casa la fabricación estadounidense
- Las empresas establecen plazos para los sistemas inteligentes
- El caso de la impresión 3D en la fabricación
- Encontrar el retorno de la inversión para la fabricación inteligente
- Material para la próxima generación de sensores inteligentes
- Software para la fábrica inteligente:Las ventajas del software independiente del hardware
- Sistemas hidráulicos y la necesidad de mantenimiento