


Funcionamiento del sensor táctil y sus tipos
El WSG -DSA es un dedo de agarre que integra detección táctil para retroalimentación de perfil de alta resolución durante el agarre. Para fines de detección, utiliza un transductor táctil inteligente DSA9205i. Encaja en la parte superior de las mordazas de la base del WSG y se conecta directamente con el controlador de la pinza a través del puerto del sensor integrado dentro de las mordazas de la base, de modo que no se necesitan componentes ni cables externos para incluir un dispositivo táctil en sus aplicaciones de manipulación. Estos tipos de sensores de dedos detectados automáticamente y parametrizados por el WSG. El perfil de presión se puede utilizar desde el interior del controlador de pinza mediante una potente interfaz de secuencias de comandos. Este artículo analiza los tipos de sensores táctiles y su funcionamiento.
¿Qué es un sensor táctil?
Un sensor táctil es un dispositivo. Mide la información que viene en respuesta a la interacción física con el medio ambiente. El sentido del tacto en los seres humanos generalmente se modela, es decir, el sentido cutáneo y el sentido cinestésico. El tacto cutáneo tiene la capacidad de detectar los estímulos resultantes de la estimulación mecánica, el dolor y la temperatura. El toque cinestésico recibe señales de los sensores de los receptores presentes dentro de los músculos, tendones y articulaciones.

Tipos de sensores táctiles
Hay diferentes tipos de sensores táctiles que se detallan a continuación
- Sensor de fuerza / torsión
- Sensor dinámico
- Sensor térmico
Sensor de fuerza / torsión
Los sensores de fuerza / torsión se utilizan en combinación con una matriz táctil para brindar información para el control de la fuerza. Estos tipos de sensores pueden detectar la carga en cualquier lugar como el enlace distal de un manipulador y en las limitaciones como un sensor de piel. El sensor de piel generalmente proporciona una medición de fuerza más precisa en anchos de banda más altos. Si el enlace del manipulador se define de forma general, y se asume el contacto del punto de señal, entonces el sensor de fuerza / par puede dar la información sobre la ubicación del contacto de fuerza y momentos, lo que se denomina detección táctil intrínseca. La imagen del sensor de torque se muestra a continuación.

Sensor dinámico
Los sensores dinámicos son acelerómetros más pequeños en las tiras de los dedos o en la piel del dedo robótico. La función general como los corpúsculos de Pacini en los seres humanos y tienen campos respectivos igualmente grandes; por lo tanto, uno o dos acelerómetros de pieles son suficientes para todo el dedo. Estos sensores detectan eficazmente la creación y la ruptura del contacto, las vibraciones relacionadas con el deslizamiento sobre superficies texturizadas.
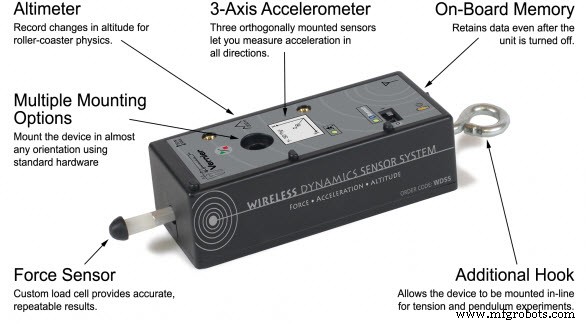
Un sensor de tasa de estrés es el segundo tipo de sensor táctil dinámico. Si la yema del dedo se desliza a la velocidad de unos pocos cm / s en general pequeñas protuberancias o hoyos en una superficie, los cambios temporales en la piel se vuelven importantes. Un polímero piezoeléctrico como el PVDF produce una carga en respuesta al daño que se puede aplicar para producir una corriente, que es directamente proporcional al rango de cambio.
Sensor térmico
Los sensores térmicos son importantes para la capacidad humana de identificar los materiales de los objetos fabricados, pero algunos también se utilizan en robótica. La detección térmica implica la detección de gradientes térmicos en la piel, que corresponden tanto a la temperatura como a la conductividad térmica de un objeto. Los sensores térmicos robóticos están involucrados en las uniones Peltier en combinación con los termistores.

Principio de funcionamiento y diagrama de circuito del sensor táctil
Los sensores táctiles están desarrollados para proporcionar capacidades de detección táctil para manipuladores teleoperativos y robots inteligentes. Los sensores táctiles pueden identificar una fuerza normal aplicada a los píxeles táctiles para hipnotizar el control de fuerza y las imágenes táctiles y generar reconocimiento de objetos. Sin embargo, para obtener imágenes táctiles y fuerzas normales, la información de la tangencial es fundamental para el control de la fuerza y la prevención de deslizamientos, lo cual es fascinante para el éxito de la tarea; por lo tanto, se requieren sensores táctiles tridimensionales.
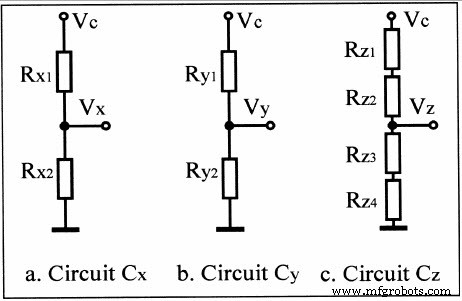
Hay varios sensores táctiles tridimensionales desarrollados mediante el uso de elementos sensores opcionales, capacitivos y piezorresistivos, y estos sensores táctiles están fabricados con tecnología MEMS. Los elementos sensores integrados y los circuitos de preprocesamiento son compactos, pero son demasiado débiles y se rompen fácilmente para la mayoría de las aplicaciones; y, por ejemplo, el rango de fuerza de un sensor táctil es solo 0.01 N w4x y los otros sensores táctiles no son proporcionados por la tecnología MEMS. El siguiente diagrama de circuito muestra un circuito de sensor táctil.
El sensor táctil en robótica
El sensor táctil que se utiliza en los robots de la NASA se muestra a continuación
- Uno de los ejemplos directamente relacionados con la exploración planetaria.
- La NASA usa estos sensores en la estación espacial internacional para ayudar a los humanos con la reparación / mantenimiento del medio ambiente
- La NASA ha probado muchos sensores táctiles en robótica que se encuentran en la etapa inicial. Han utilizado Force Sensing Resistor, y ahora se utilizan compuestos de túnel cuántico
- Se han convertido en una práctica múltiples botones de carga y celdas para desarrollar sensores táctiles producidos por un robot industrial
Aplicaciones de sensores táctiles
Las aplicaciones de sensores táctiles se utilizan en
- Robótica
- Hardware de computadora
- Sistema de seguridad
- Dispositivos con pantalla táctil en teléfonos móviles
- Computación
Ventajas del sensor táctil
Las ventajas del sensor táctil se detallan a continuación:
- Ofrecen soluciones de sensores táctiles fáciles de usar
- El sensor táctil no tiene componentes ni cables externos
- Extracción compacta
- Tecnología de detección táctil verificada de robótica.
Se trata del principio de funcionamiento y las aplicaciones del sensor táctil. Esperamos que la información proporcionada sea útil para proporcionar una buena información y comprensión del proyecto. Además, si tiene alguna consulta sobre este concepto en los proyectos eléctricos y electrónicos, puede comentar en la sección siguiente. Aquí tiene una pregunta:¿cuáles son las funciones de los sensores táctiles?
Créditos de las fotografías:
- Espacio cuadrado con sensor táctil
- Técnicas de transducción del sensor de fuerza / par
- Vernier de sensor dinámico
- Imágenes del sensor térmico-amazon
Sensor
- Qué es un sensor de distancia en funcionamiento y sus aplicaciones
- Qué es un sensor IMX586:funcionamiento y sus características
- Qué es el funcionamiento del sensor de peso y sus especificaciones
- Funcionamiento del sensor virtual y sus aplicaciones
- Funcionamiento del sensor de voltaje y sus aplicaciones
- Sensor Lambda - Funcionamiento y sus aplicaciones
- Funcionamiento del sensor IMU y sus aplicaciones
- Funcionamiento del sensor de ocupación y sus aplicaciones
- Funcionamiento del sensor de puerta y sus aplicaciones
- Funcionamiento del sensor NFC y sus aplicaciones
- El funcionamiento del sensor de imagen y sus aplicaciones