


Cobots 2026:cómo funcionan los robots colaborativos y por qué son importantes

Por el equipo editorial de EVST · Última actualización:10 de junio de 2026
Un robot colaborativo, o cobot, es un brazo industrial liviano diseñado para operar junto a personas sin necesidad de una valla de seguridad. Lo logra mediante la limitación de potencia y fuerza:los sensores de torsión en cada articulación detectan el contacto e inmediatamente detienen o retraen el brazo antes de que una colisión pueda causar lesiones. ISO/TS 15066 describe cuatro modos de colaboración que definen la proximidad permitida entre un humano y un robot. En 2026, las cargas útiles de los cobots normalmente oscilarán entre 3 kg y 30 kg, con alcances que abarcarán aproximadamente entre 600 mm y 1800 mm.
Qué diferencia a un cobot de un robot convencional
El término "colaborativo" se refiere a la capacidad de seguridad, no a una clase mecánica distinta. Un cobot sigue siendo un brazo articulado de 6 ejes equipado con servomotores, cajas de cambios y codificadores en cada articulación. Lo que lo distingue es la detección y el control adicionales que le permiten compartir un espacio de trabajo de manera segura, combinado con un diseño que minimiza el riesgo de lesiones:bordes redondeados, poca masa en movimiento, sin puntos de pellizco y límites de velocidad.
Los robots industriales tradicionales están construidos para brindar velocidad, carga útil y repetibilidad dentro de una celda vigilada, asumiendo que no hay presencia humana en el entorno de trabajo. Los cobots cambian la velocidad máxima y la carga útil por la capacidad de operar en un espacio compartido, lo que a su vez cambia la economía de implementación:una célula cobot puede prescindir de vallas, cortinas de luz y el espacio superior que requiere una célula vallada. Este ahorro de costos es una ventaja clave para los fabricantes pequeños y medianos. Para obtener un recorrido estructurado de los tipos de cobots y los criterios de selección, consulte nuestra guía completa sobre tipos, selección y aplicaciones de cobots, que complementa este artículo con una inmersión más profunda en los mecanismos de seguridad.
Según el informe World Robotics 2025 de la Federación Internacional de Robótica, los robots colaborativos siguen siendo el segmento de más rápido crecimiento del mercado de robots industriales por tasa de crecimiento unitario, aunque todavía representan una minoría del total de instalaciones. El crecimiento se concentra en el ensamblaje de productos electrónicos, el mantenimiento de máquinas y el embalaje, áreas donde los pesos de las piezas son bajos y la proximidad entre humanos y robots es operativamente útil.
Cómo funciona un cobot:la mecánica de seguridad
La tecnología central que permite a los cobots es cómo detectan y limitan la fuerza de contacto. En 2026, predominarán tres enfoques y la mayoría de los cobots de producción combinan más de uno.
Detección de par de articulación
Cada junta contiene un sensor de torsión, o el controlador infiere la torsión a partir de la corriente del motor. Durante el movimiento normal, el controlador conoce el perfil de par esperado para la trayectoria programada a la velocidad programada. Si el par medido supera un umbral, el controlador lo interpreta como una fuerza externa inesperada, activa una parada de protección y lleva el brazo a una posición segura. El tiempo de reacción desde el contacto hasta la parada es del orden de milisegundos, lo que mantiene la fuerza de contacto por debajo de los umbrales de lesión.
Limitación de potencia y fuerza (PFL)
PFL es el método colaborativo más común. El robot está diseñado y configurado para que, incluso en el peor de los casos, la fuerza y la presión transmitidas permanezcan por debajo de los límites biomecánicos definidos en ISO/TS 15066 AnexoA para la región del cuerpo relevante. Esto se logra mediante una masa en movimiento baja, límites de velocidad, geometría redondeada y el tope con detección de torque descrito anteriormente. PFL permite que muchos cobots funcionen sin vallas ni cortinas de luz porque el propio robot actúa como sistema de seguridad.
Monitoreo de velocidad y separación
Como alternativa o complemento, sensores de seguridad externos, como escáneres láser, cámaras 3D o tapetes de seguridad, rastrean la posición del operador. El robot funciona a toda velocidad cuando no hay nadie cerca, reduce la velocidad cuando se acerca una persona y se detiene si se supera la distancia de separación protectora. Esto permite que un robot más rápido y pesado se comporte de manera colaborativa sin sacrificar la velocidad productiva cuando el espacio de trabajo está despejado.
En la práctica, las implementaciones más limpias combinan métodos:PFL como seguridad básica, con monitoreo de velocidad y separación en capas para recuperar el rendimiento cuando no hay ningún operador presente. Las observaciones de la industria de implementaciones en líneas de ensamblaje muestran que un cobot configurado exclusivamente para la velocidad de PFL en el peor de los casos puede perder entre un 40% y un 60% de su rendimiento potencial en comparación con el mismo brazo al que se le permite funcionar rápidamente cuando el espacio de trabajo está despejado; por lo tanto, las configuraciones híbridas ahora son las predeterminadas en líneas de mayor volumen.
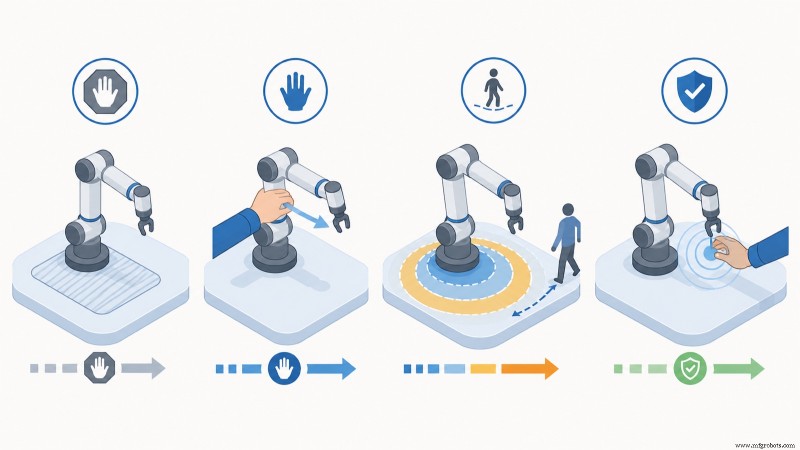
Los cuatro modos de colaboración según ISO/TS 15066
ISO/TS 15066:2016 complementa ISO10218 para operación colaborativa y define cuatro métodos de colaboración distintos. Una sola aplicación puede utilizar uno o combinar varios. Comprender qué modo necesita una aplicación es el primer paso para especificar una celda cobot segura.
| Modo de colaboración | Cómo funciona | Interacción humano-robot | Aplicación típica |
|---|---|---|---|
| Parada monitoreada con clasificación de seguridad | El robot se detiene cuando una persona ingresa al espacio compartido; se reanuda cuando se van | No hay movimiento mientras haya un ser humano presente en la zona de colaboración | Carga/descarga manual de una célula robótica, tareas ocasionales en espacios compartidos |
| Guía manual | El operador mueve físicamente el brazo utilizando un dispositivo de guía manual; el robot cumple con la fuerza aplicada | Guía física directa, movimiento del robot impulsado por el operador | Rutas de enseñanza, elevación asistida, posicionamiento de piezas de bajo volumen |
| Monitoreo de velocidad y separación | La velocidad del robot escala con la distancia del operador, medida por sensores de seguridad | Convivencia con reducción dinámica de velocidad, parada total en distancia mínima | Células mixtas donde humanos y robots trabajan en proximidad alterna |
| Limitación de potencia y fuerza | La fuerza de contacto y la presión se mantienen por debajo de los límites biomecánicos mediante diseño y control | Se permite el contacto directo; el robot se detiene ante una fuerza inesperada | Tarea compartida de montaje, cuidado de máquinas, embalaje junto a los operadores |
ISO/TS 15066 organiza los límites biomecánicos por región del cuerpo:los límites para la cara y el cráneo son mucho más estrictos que para la parte superior del brazo o la mano, lo que refleja la gravedad de una posible lesión. Una evaluación de riesgos correcta asigna las partes de la trayectoria del robot donde es posible el contacto con las regiones del cuerpo que podrían entrar en contacto y luego verifica que la fuerza y la presión se mantengan por debajo del límite relevante. Por eso un cobot que es “seguro” para una aplicación no lo es automáticamente para otra:cambiar la herramienta, la pieza o el diseño cambia los escenarios de contacto.
Anatomía de un Cobot:componentes y especificaciones
La hoja de especificaciones de un cobot se parece a la de un pequeño robot industrial, con algunas adiciones específicas de la colaboración. Los parámetros que más importan durante la selección son:
- Carga útil — la masa máxima en la brida de la herramienta, incluida la pinza o la herramienta. Las cargas útiles del cobot 2026 se agrupan en 3, 5, 6, 10, 12, 16, 18, 20 y hasta la clase de 30 kg.
- Alcance — el radio de la zona de trabajo, normalmente de 500 mm a 1800 mm. El alcance y la carga útil se compensan entre sí dentro de una familia de productos.
- Repetibilidad — con qué precisión el brazo regresa a un punto aprendido, generalmente entre ±0,02 mm y ±0,1 mm, según el tamaño. La repetibilidad mide la coherencia, que es lo que necesitan la mayoría de las tareas de montaje y cuidado.
- Grados de libertad — seis es el estándar para tareas generales en 3D; Los cobots de siete ejes añaden flexibilidad de alcance en espacios abarrotados.
- Brida para herramientas y E/S — la interfaz de montaje y las conexiones eléctricas/neumáticas para pinzas y sensores, a menudo tendidas a través de la muñeca.
- Funciones con clasificación de seguridad — zonas de seguridad configurables, límites de velocidad, límites de fuerza y parada monitoreada con clasificación de seguridad, todos certificados según los niveles de seguridad funcional ISO10218‑1 e IEC61508/62061.
La capacidad de colaboración reside principalmente en el controlador y la detección conjunta, no en un solo componente visible. Es por eso que dos brazos con idéntica carga útil y alcance pueden diferir significativamente en seguridad y velocidad:la diferencia radica en el controlador de seguridad, la resolución del sensor y el ajuste de detección de colisiones.
Dónde se aplican los cobots
Los cobots prosperan en aplicaciones donde los pesos de las piezas son modestos, la proximidad humana es útil y la flexibilidad para volver a implementar el brazo es más importante que el tiempo máximo del ciclo. Las familias de aplicaciones más comunes en 2026 incluyen:
Cuidado de máquinas
Carga y descarga de máquinas CNC, prensas de moldeo por inyección y plegadoras. El cobot recoge una pieza en bruto, carga la máquina, espera el ciclo y descarga la pieza terminada. Debido a que el operador aún puede acceder a la máquina cuando el cobot está detenido, la celda permanece flexible. El cuidado de máquinas es la aplicación de cobot más grande por base instalada.
Montaje y atornillado
Tareas repetitivas de fijación, inserción y ensamblaje de lugares, a menudo junto a un humano que maneja pasos que requieren mucho juicio. Los cobots controlados por fuerza destacan en tareas de inserción (ajustes a presión, ajustes a presión) donde un perfil de fuerza programado evita daños a las piezas.
Embalaje y Paletizado
Empaquetado de cajas de final de línea y paletizado ligero. Los paletizadores Cobot manipulan cajas hasta la carga útil del brazo, formando pilas estables sobre un palé. Para cajas más pesadas, la carga útil se convierte en el factor limitante y un robot paletizador convencional se hace cargo.
Inspección de calidad y automatización de laboratorio
Los cobots equipados con cámaras o sensores realizan pases de inspección repetibles y, en los laboratorios, manipulan muestras, pipetas y cuidan los instrumentos. El diseño sin vallas se adapta a entornos donde las personas y los equipos comparten bancos reducidos.
Soldadura y Acabado de Superficies
La soldadura Cobot ha crecido rápidamente en los talleres, donde las costuras cortas y los volúmenes bajos no justifican una celda de soldadura cercada. Los cobots también se encargan del lijado, pulido y desbarbado con control de fuerza. Para una soldadura sostenida de gran volumen en piezas pesadas, un brazo protegido de 6 ejes sigue siendo la herramienta adecuada, como se explica en nuestra guía de robots de soldadura para la industria pesada.
Entornos peligrosos y extremos
Los cobots a prueba de explosiones extienden la operación colaborativa a atmósferas con gases inflamables, como instalaciones químicas, de pintura y de energía. Estos requieren clasificaciones de gabinete certificadas en lugar de carcasas de cobot estándar. Consulte nuestra guía dedicada a cobots a prueba de explosiones para entornos peligrosos para obtener detalles sobre la certificación.
Cobot vs robot industrial:cuando cada uno gana
La elección entre un cobot y un robot industrial convencional es una decisión de aplicación, no una cuestión de qué tecnología es más avanzada. La siguiente matriz enmarca la compensación.
| Factor | Robot colaborativo | Robot industrial convencional |
|---|---|---|
| Carga útil | 3 a 30 kg típico | 5 a 800+kg |
| Velocidad | Limitado por motivos de seguridad; más rápido con el monitoreo de separación | Alto, optimizado para el tiempo de ciclo |
| Protección de seguridad | A menudo sin vallas después de la evaluación de riesgos | Celda cercada, cortinas de luz, enclavamientos |
| Espacio | Compacto, sin espacio de protección | Más grande, incluye perímetro de seguridad |
| Reimplementación | Rápido; el brazo se puede mover entre tareas | Más lento; la celda es semipermanente |
| Adecuado para | Baja carga útil, alta combinación y tareas adyacentes a humanos | Alto volumen, gran carga útil, ciclo sostenido |
Para obtener un marco de decisión completo, consulte nuestro análisis complementario, cobot versus robot industrial:cuál debería elegir su fábrica en 2026. En resumen, un cobot gana cuando la carga útil es baja, el diseño se beneficia al compartir espacio con las personas y la línea cambia con frecuencia; un robot convencional gana cuando el volumen y la carga útil son altos y la celda se puede dedicar.
Implementación segura de un cobot:la evaluación de riesgos
Un error común es pensar que un cobot está "a salvo desde el primer momento". El brazo está diseñado para ser colaborativo, pero la aplicación en su conjunto (el brazo más la herramienta, la pieza, el diseño y la tarea) debe evaluarse y certificarse. Según ISO10218‑2 e ISO/TS15066, el integrador (a menudo el usuario final) es responsable de una evaluación de riesgos de la aplicación colaborativa completa.
- Identificar peligros. Mapee cada punto en la trayectoria del robot donde es posible el contacto con una persona, además de los peligros de las herramientas (pinzas afiladas, efectores de extremo caliente) y la pieza que se manipula.
- Clasifica el modo de colaboración. Decida cuál de los cuatro modos ISO/TS15066 utiliza la tarea y para qué fases del ciclo.
- Verificar los límites biomecánicos. Para el funcionamiento con potencia y fuerza limitada, confirme que la fuerza de contacto y la presión para cada contacto posible se mantengan por debajo del límite del Anexo A para esa región del cuerpo, mediante cálculo o medición con un dispositivo de prueba de fuerza-presión.
- Configurar funciones de seguridad. Establezca límites de velocidad, fuerza y zona en el controlador de seguridad y valídelos.
- Documentar y validar. Registre la evaluación, valide la celda conforme a obra con respecto a ella y vuelva a evaluar cada vez que cambie la herramienta, pieza o diseño.
En la práctica, cuando los ingenieros de aplicaciones de EVST encargan una celda colaborativa en el sitio, el hallazgo más frecuente durante la validación es que una pinza o una pieza con bordes afilados crea una presión de contacto por encima del límite del Anexo A, incluso aunque el brazo en sí esté dentro de los límites de fuerza. La solución suele ser un rediseño de la pinza, una protección de borde o una reducción de la velocidad en el segmento de ruta afectado, no un robot diferente. Este es el paso que los compradores suelen subestimar cuando suponen que un cobot elimina la necesidad de ingeniería de seguridad.
Gama de robots colaborativos de EVST
EVST, con sede en Chengdu y fabricación en Wenling, ha enviado automatización a más de 100 países en siete años. Su línea de robots colaborativos cubre cargas útiles desde 3 kg hasta la clase de 30 kg, con modelos publicados que incluyen un brazo de 3 kg/620 mm, un brazo de 6 kg/917 mm, un brazo de 12 kg/1300 mm y un brazo de 18 kg/900 mm. EVST también produce un robot colaborativo a prueba de explosiones para atmósferas peligrosas y una línea de cobots para servicios de catering, junto con sus robots industriales convencionales QJAR, SCARA y familias de productos delta.
La línea de producción de EVST cuenta con la certificación de calidad de grado automotriz IATF16949 y sus productos cuentan con certificaciones de terceros CE, SGS y TUV. El cobot a prueba de explosiones está clasificado para su uso en atmósferas inflamables, lo que extiende la operación colaborativa a entornos a los que las carcasas de cobot estándar no pueden ingresar. La empresa también posee una patente de invención concedida (CNZL202011601091.6), cuatro patentes de invención en examen sustantivo y dos derechos de autor de software, respaldados por una red de ingeniería de campo que abarca más de 100 países para la puesta en servicio in situ y soporte de evaluación de riesgos.
Preguntas frecuentes
¿Qué es un robot colaborativo en términos simples?
Un robot colaborativo es un brazo robótico construido para trabajar de forma segura junto a personas sin valla de seguridad. Utiliza sensores de torsión en sus articulaciones para detectar el contacto y detenerse rápidamente, y está diseñado con masa baja, velocidad limitada y superficies redondeadas para que cualquier contacto se mantenga por debajo de los límites de fuerza y presión que podrían causar lesiones, como se define en ISO/TS15066.
¿Los cobots realmente no necesitan una valla de seguridad?
A menudo, pero no automáticamente. La necesidad de una valla depende de la evaluación de riesgos de la aplicación completa, el brazo más su herramienta, la pieza y la tarea. Muchas aplicaciones de baja carga útil y baja velocidad se ejecutan sin barreras después de la evaluación. Pero una herramienta afilada, una pieza pesada o con bordes afilados, o un requisito de alta velocidad pueden obligar a una mayor protección o monitoreo de velocidad y separación. El cobot permite un diseño sin vallas; la evaluación de riesgos confirma si uno está permitido.
¿Qué carga útil y alcance necesito para un cobot?
Agregue el peso de la pieza y el peso de la pinza al tamaño de la carga útil y deje aproximadamente entre un 20% y un 30% de margen. Para el cuidado mecánico de piezas pequeñas, lo común es un brazo de 5 kg a 10 kg; para paletizado o manipulación más pesada, de 16kg a 30kg. El alcance debe cubrir todo el ámbito de trabajo de la tarea, normalmente de 600 mm a 1300 mm para trabajos de mesa y con máquinas, y más tiempo para paletizado.
¿Cuál es la diferencia entre ISO10218 e ISO/TS15066?
ISO10218 (partes 1 y 2) es el estándar de seguridad central para robots industriales y su integración. ISO/TS15066 es una especificación técnica que la complementa específicamente para operación colaborativa, añadiendo los cuatro modos de colaboración y los límites de fuerza y presión biomecánica en su Anexo A. Una aplicación colaborativa debe satisfacer ambos. Para obtener un desglose centrado en el comprador, consulte nuestra guía sobre los estándares de seguridad de los cobots en el sitio de productos EVST.
¿Qué tan rápido puede moverse un cobot?
En el modo de potencia y fuerza limitada, la velocidad del cobot está limitada para que el contacto en el peor de los casos se mantenga dentro de los límites biomecánicos, a menudo muy por debajo de los de un robot convencional. Con el monitoreo de velocidad y separación, el mismo brazo puede funcionar cerca de su máximo mecánico cuando no hay ningún operador en la zona de protección, y luego reducir la velocidad o detenerse cuando se acerca una persona. Las configuraciones híbridas recuperan la mayor parte del rendimiento perdido y al mismo tiempo preservan la seguridad colaborativa.
Adónde ir a continuación
Para hacer coincidir un cobot específico con una carga útil y alcanzar los requisitos con una ruta hacia una cotización, consulte la guía del sitio de productos de EVST para la selección de carga útil del robot colaborativo de 3 kg a 30 kg. Para conocer los detalles sobre los estándares de seguridad que los compradores necesitan antes de especificar una celda sin cerca, consulte los estándares de seguridad del cobot explicados para los compradores. Para conocer una decisión más amplia sobre construir o comprar, lea cobot frente a robot industrial y, para estimar la rentabilidad, nuestra calculadora de ROI de cobot para la fabricación de pymes. Si tiene preguntas sobre adquisiciones, puede comunicarse con el departamento de ventas de EVST a través de la página de contacto.
Acerca del autor:El equipo editorial de EVST escribe sobre robótica industrial y fabricación inteligente para ingenieros y líderes de operaciones que evalúan proyectos de automatización. EVST (EVSTECHCO.,LTD), fundada en Chengdu en 2018, ha entregado más de 600 proyectos de automatización y envíos a más de 100 países, con certificación de grado automotriz IATF16949 y certificaciones de terceros CE/SGS/TUV en las familias de productos QJAR, robot colaborativo, SCARA y delta.
Robot industrial
- ¿Por qué elegir un brazo robótico de seis ejes en lugar de un sistema personalizado de varios ejes?
- Tecnología robótica Motoman
- Automatización de la fabricación de electrodomésticos con robots
- ¿Cómo lo hacen? Montaje del brazo robótico
- Mejore la calidad de soldadura y los tiempos de ciclo con AccuFast II de Motoman
- Reducción de la contaminación con robots de envasado de botellas
- IO-Link acelera la digitalización de plantas de proceso
- Pila alto con el fiable robot KUKA KR40 PA
- Brazos robóticos en la fabricación y sus beneficios
- Robots colaborativos de Fanuc:la miniserie
- Cómo integrar con éxito la robótica en sus instalaciones