


Brazo robótico Arduino IoT
Componentes y suministros
 |
| × | 1 | |||
| × | 5 |
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
Este es mi primer brazo robótico con las siguientes características:
- Robot 5DOF, en realidad 4 si excluimos la pinza
- el cerebro es un Arduino Yun con capacidades de IoT
- la interfaz de control está integrada en la aplicación Blynk
- La cinemática de avance se implementa en Matlab utilizando Robotics Toolbox
- una nueva biblioteca que escribí que realiza un movimiento suave
Estoy muy contento con el resultado. Por lo tanto, me gustaría compartir con ustedes mi experiencia y cómo construirla.
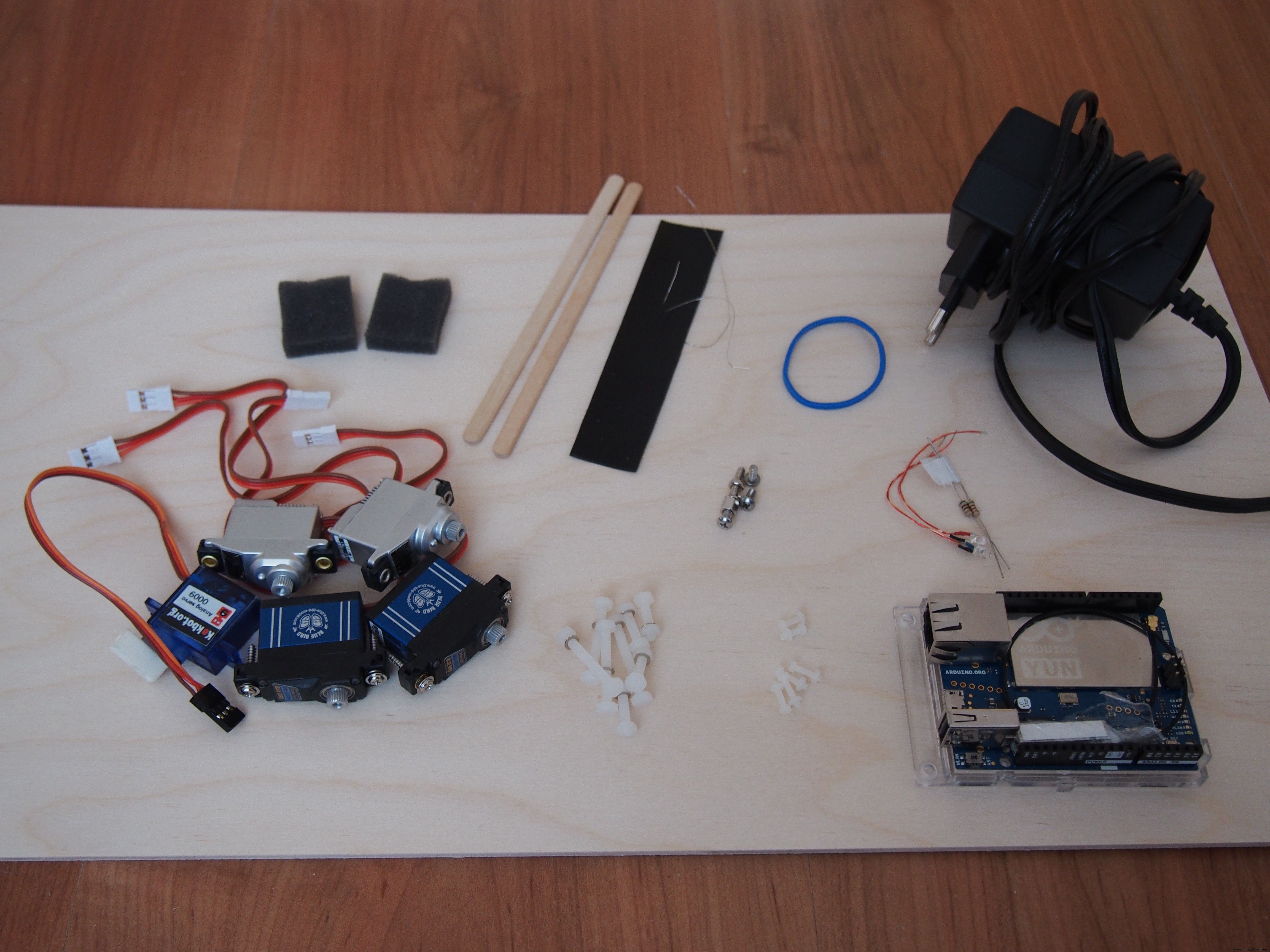
Componentes y materiales
Para construir el robot necesitas:
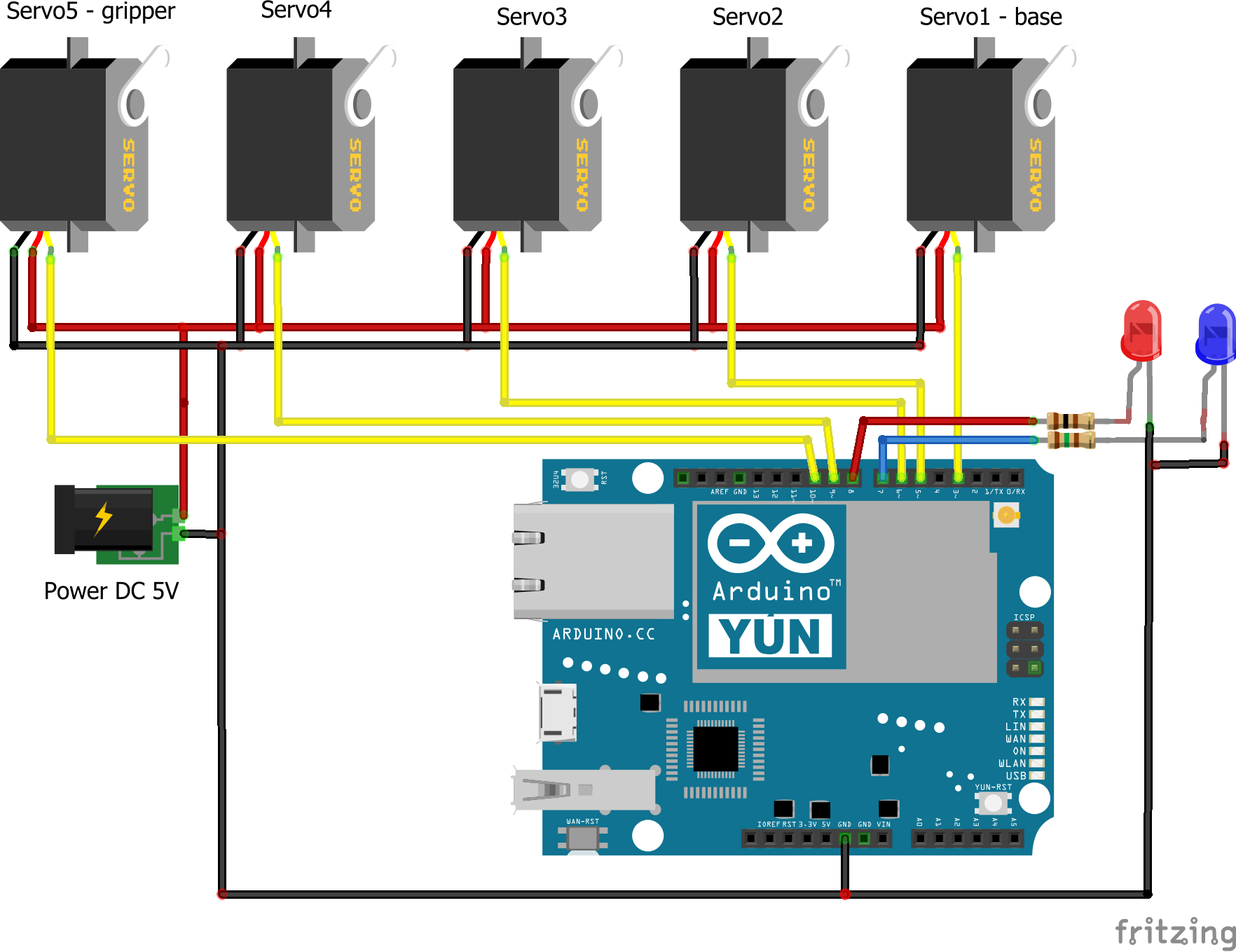
- 1 x Arduino Yun (o cualquier placa Arduino)
- 5 x servomotores
- 1 cargador de 5 V, mínimo 2,5 A
- 2 x LED
- 2 resistencias, 100 ohmios (para led rojo) y 150 ohmios (para led azul), respectivamente
- 2 x varillas de madera para mezclar
- 1 x alambre metálico (o similar)
- 1 hoja de plástico (la saqué de una botella de gel de ducha)
- 1 x banda de goma
- 2 x esponjas pequeñas (vea la esquina superior izquierda)
- 9 x tornillos M3 de plástico
- 6 x tornillos M2.5 de plástico
- 1 x placa de madera de 3 mm (30 cm x 50 cm debería ser más que suficiente)
- 1 x pegamento para madera
- tiempo para codificar
Construyendo el Robot
Para construir el robot, comience midiendo el tamaño de los servos y verificando el par de los servos. Esto le dará una indicación sobre el tamaño de los brazos y eventualmente el tamaño del robot. En mi caso, ordené 2 micro servos de alto par diferentes:primer par y segundo par. Estos pueden viajar hasta 140 grados a pesar de que están especificados para viajar 120 grados. Sin embargo, recomiendo comprar servos de 180 grados para tener más ángulo de recorrido.
Para la pinza, no hay necesidad de un servo de alto par. El micro-servo más barato de eBay puede hacer el trabajo.
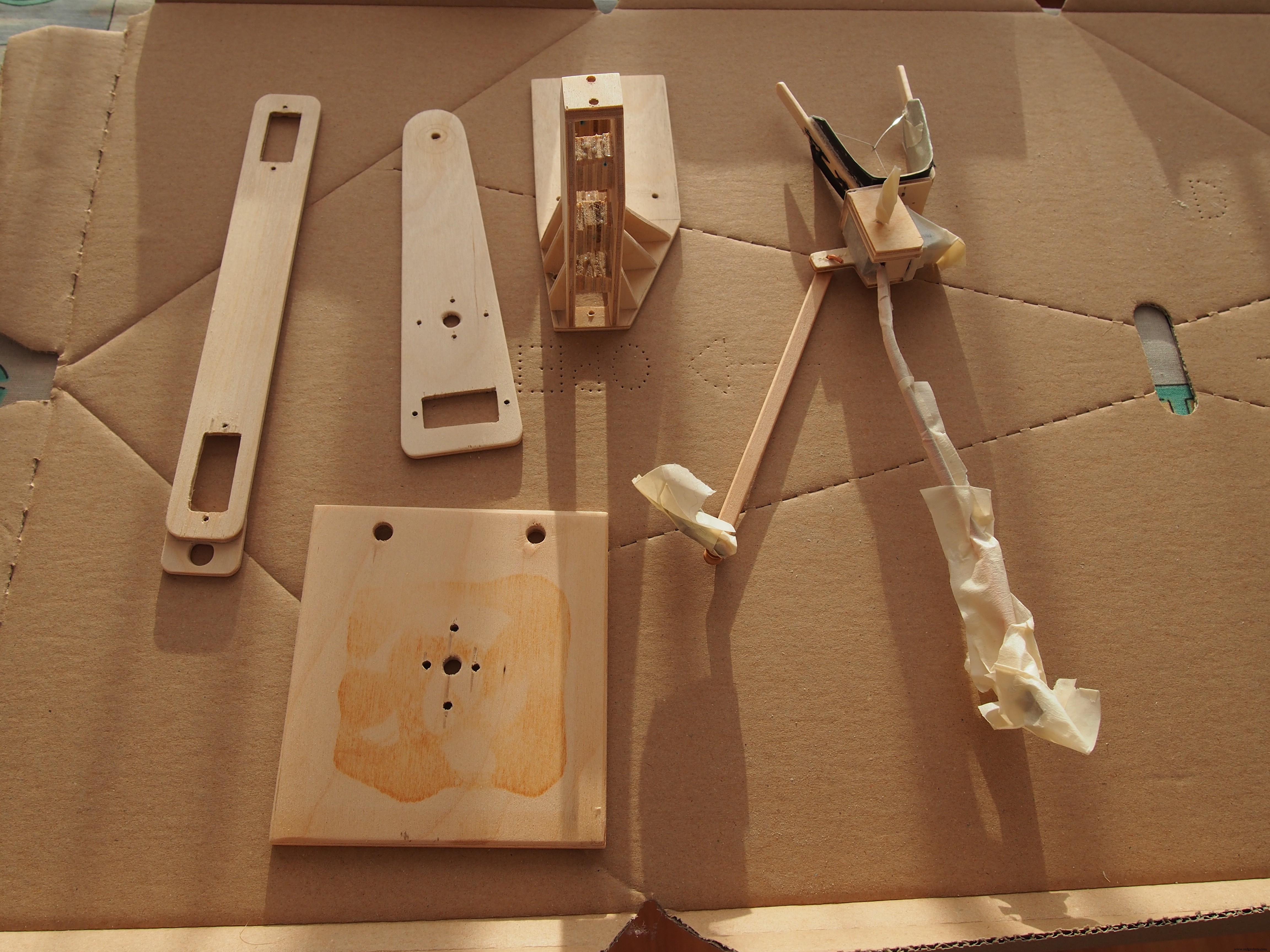
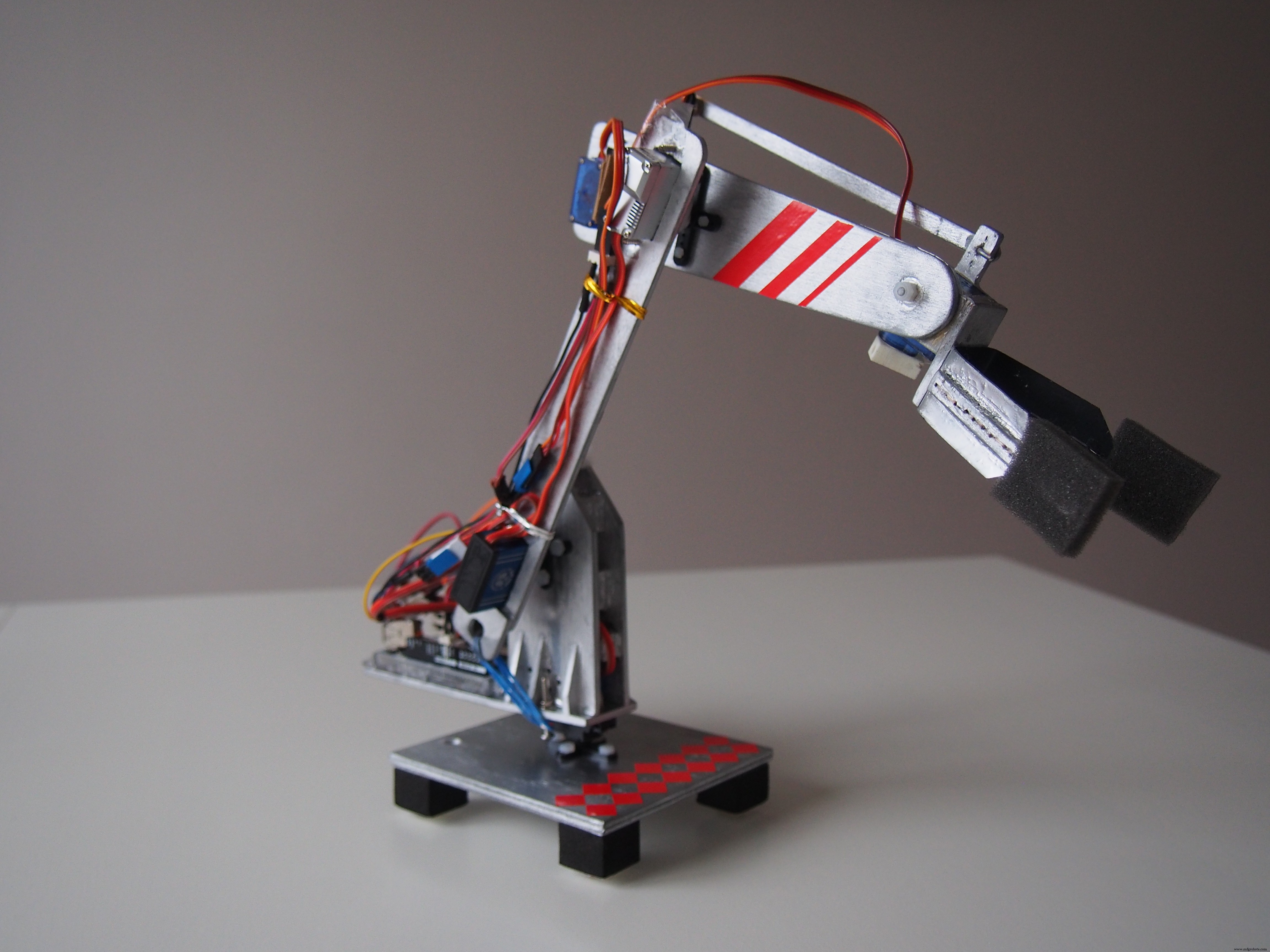
Comience cortando los brazos como ve en la Foto 1. Aquí, puede ser creativo, no hay un diseño fijo, puede crear su propio diseño. Luego, construya la pinza usando una varilla mezcladora cortada por la mitad y la hoja de plástico como retorno por resorte. Con los cables conectados al lado interior, puede cerrar y abrir la pinza. Para mi robot, utilicé un tornillo M3 para hacer pivotar la pinza. El pivote de la pinza se realiza mediante un servo ubicado al otro lado del brazo para obtener el equilibrio del peso. La potencia se transmite a través de otra varilla mezcladora (ver Foto 2, parte superior del robot).
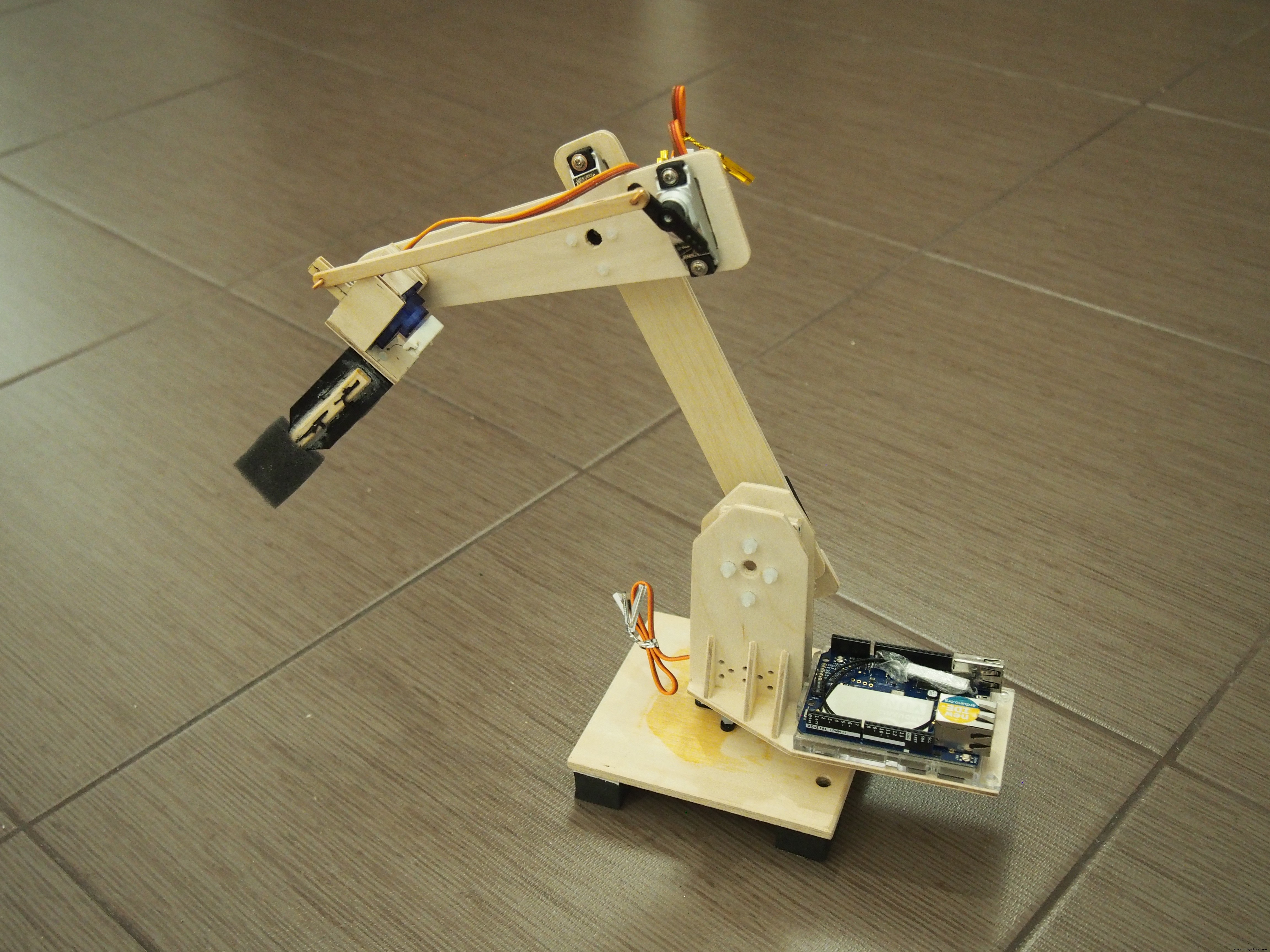
A continuación, construya la base y la placa que sostiene el servo base y la placa Arduino Yun (u otra placa). Ponga todo junto y debería tener algo como en la Foto 2.
Si desea un diseño más atractivo, lije los componentes de madera y píntelos (como en la Foto 3) con su color preferido. Para mi robot, opté por un color plateado (para imitar el metal) con rayas rojas. El resultado final se muestra en la Foto 4.

Software
Para el software, comencé creando primero una interfaz en Blynk. Si no ha utilizado Blynk antes, consulte su sitio web para saber cómo hacerlo. Debería ser muy fácil y directo.
Nota: Si no tiene una placa que pueda conectarse a Internet, no se preocupe, aún puede usar Blynk con una placa normal, por ejemplo, Arduino Uno, a través del puerto USB. Para hacer esto, lea aquí.
A continuación, vayamos al IDE de Arduino y escribamos un código. Para su conveniencia, adjunto el código, para que pueda usarlo :) Para ejecutarlo, debe hacer lo siguiente:
- Configure la placa Arduino Yun.
- Instale la biblioteca Blynk en su IDE de Arduino yendo a Sketch> Incluir biblioteca> Administrar bibliotecas, busque Blynk e instálelo.
- Agregue la biblioteca SimpleTimer en una carpeta con el nombre SimpleTimer a la carpeta de su biblioteca Arduino, generalmente Arduino \ libraries \
- Agregue la biblioteca MotionGenerator que escribí, en una carpeta con el nombre MotionGenerator a la carpeta de la biblioteca Arduino
- Compile y cargue RobotArm_instructables.ino (Nota:no olvide actualizar su token Blynk)
Nota: La biblioteca MotionGenerator es una solución basada en análisis que le brindará transiciones agradables y fluidas de un punto a otro. Permite limitaciones en la velocidad máxima y aceleración.
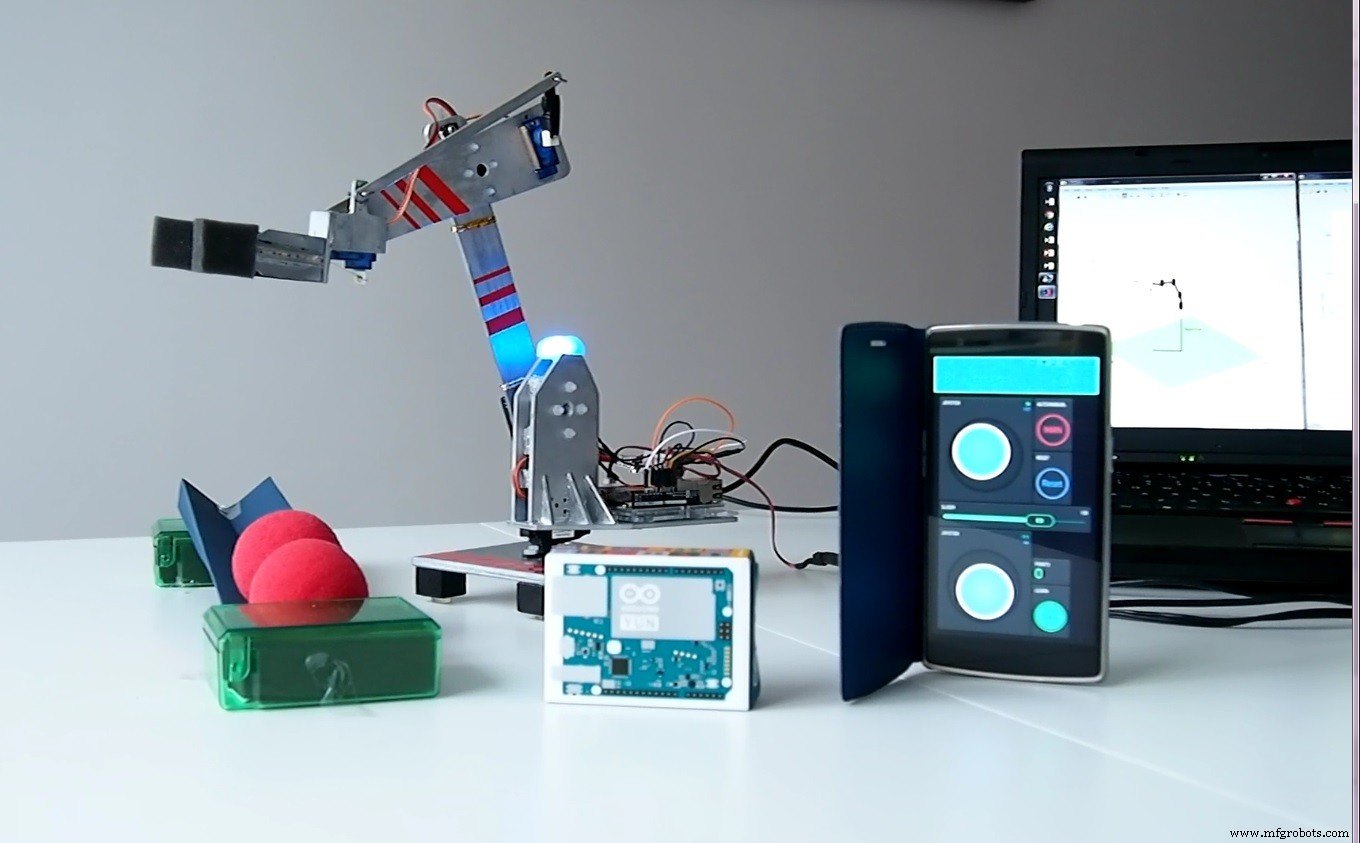

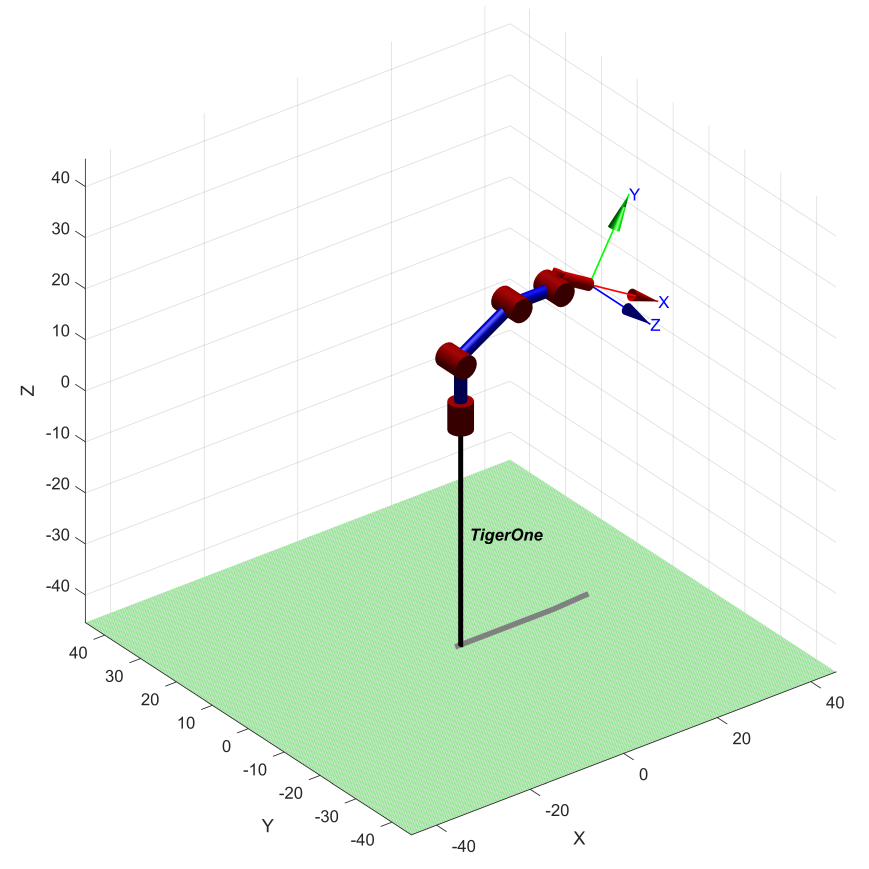
Opcional (cinemática de avance, consulte la foto 3 anterior): Para ello, necesita Matlab y Robotics Toolbox. Si tiene todos estos configurados, asegúrese de que su robot esté conectado a Blynk y al puerto USB de su computadora. Matlab recopilará información del Arduino a través de la comunicación en serie. Por lo tanto, asegúrese de completar el puerto COM correcto en MainScrip.m. Finalmente, simplemente ejecute MainScrip.m.
Nota:La cinemática del robot es para mi propio robot. Para su robot, las dimensiones pueden ser diferentes (siéntase libre de ajustar en robotKinematicsFcn.m).
Código
- Archivos de origen
Archivos de origen C / C ++
Archivo zip que contiene los archivos del código fuente.Sin vista previa (solo descarga).
Esquemas
Proceso de manufactura
- Makerarm:un brazo robótico genial para los creadores
- La placa Arduino apunta a IoT industrial
- Brazo robótico:¿Cómo se fabrica?
- Monitor de frecuencia cardíaca con IoT
- Uso de IoT para controlar de forma remota un brazo robótico
- Brazo robótico Arduino impreso en 3D
- Brazo robótico controlado por Nunchuk (con Arduino)
- Brazo robótico simple e inteligente con Arduino
- Littlearm 2C:Construya un brazo robótico Arduino impreso en 3D
- Piscina de Azure IoT
- El brazo robótico industrial:un auge en la fabricación