


Robot seguidor de línea
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Hagamos un robot completamente autónomo usando Arduino y sensores IR. Puede seguir una línea negra sobre una superficie blanca. ¡Mira el video para más información!
Componentes utilizados:
- Pedazo de cartón / lámina acrílica
- Arduino Uno
- sensor de infrarrojos
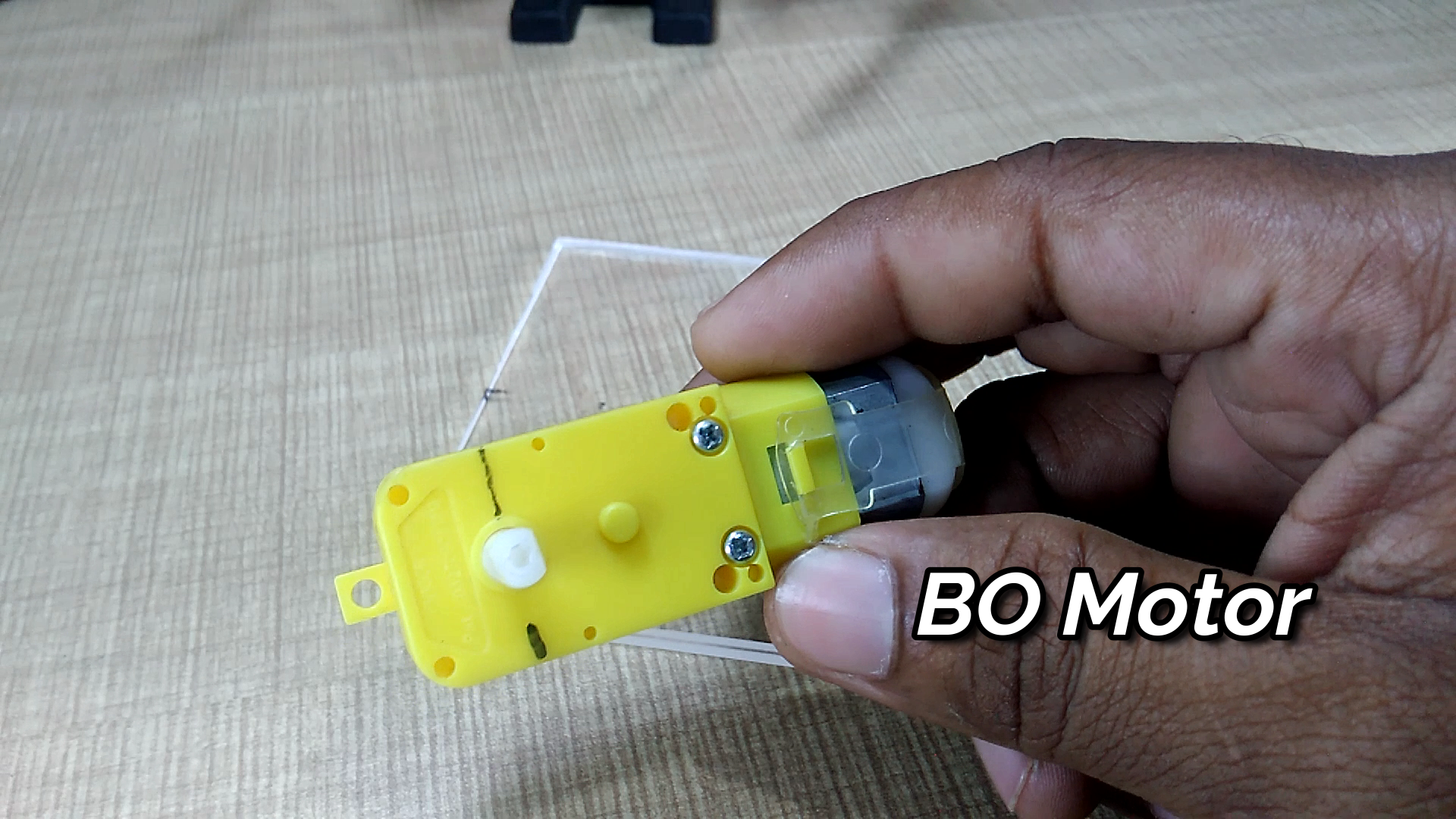
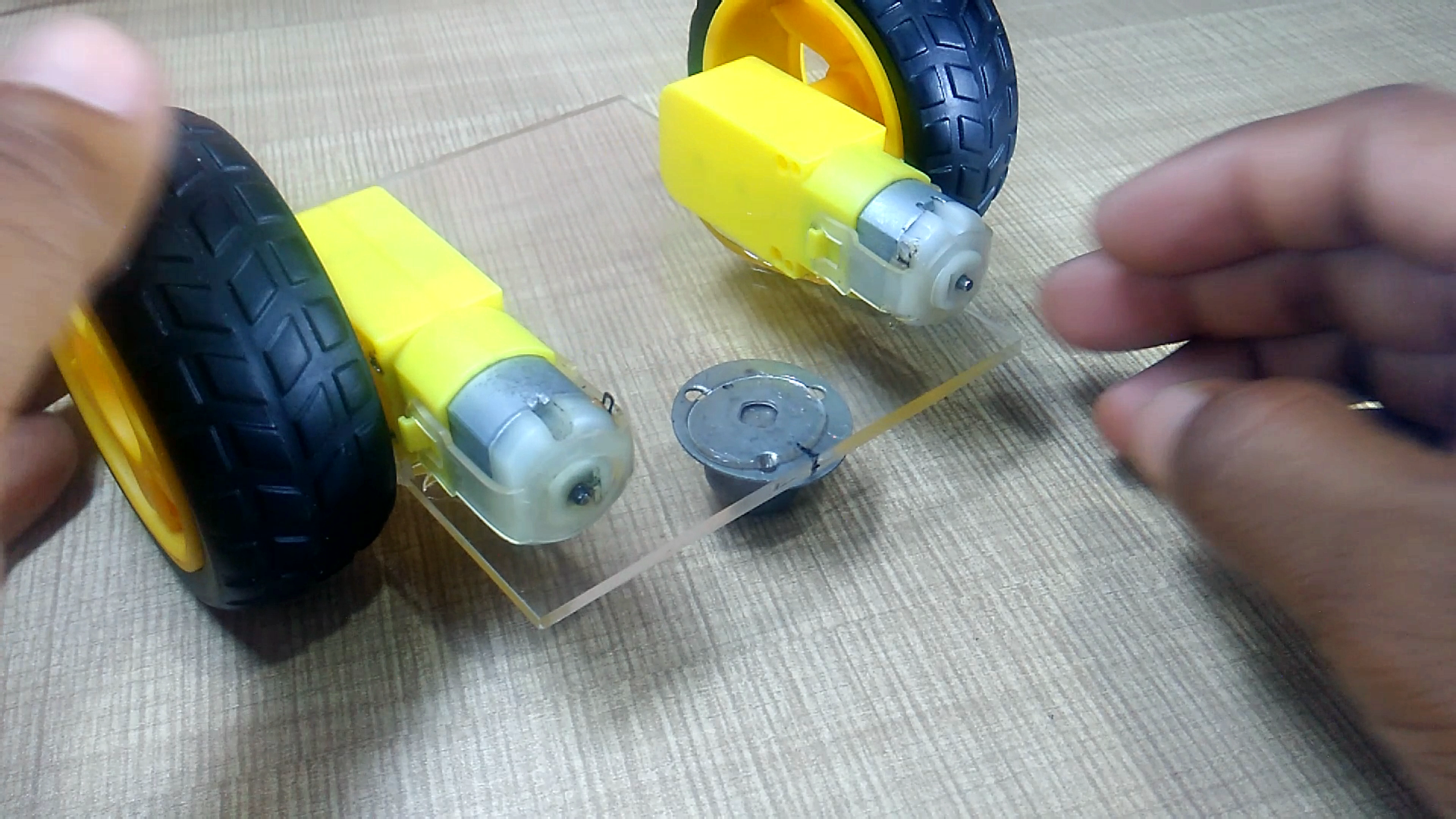
- Motor BO
- Ruedas
- Rueda giratoria
- L293d IC
- PCB
- Alambre flexible
- Batería
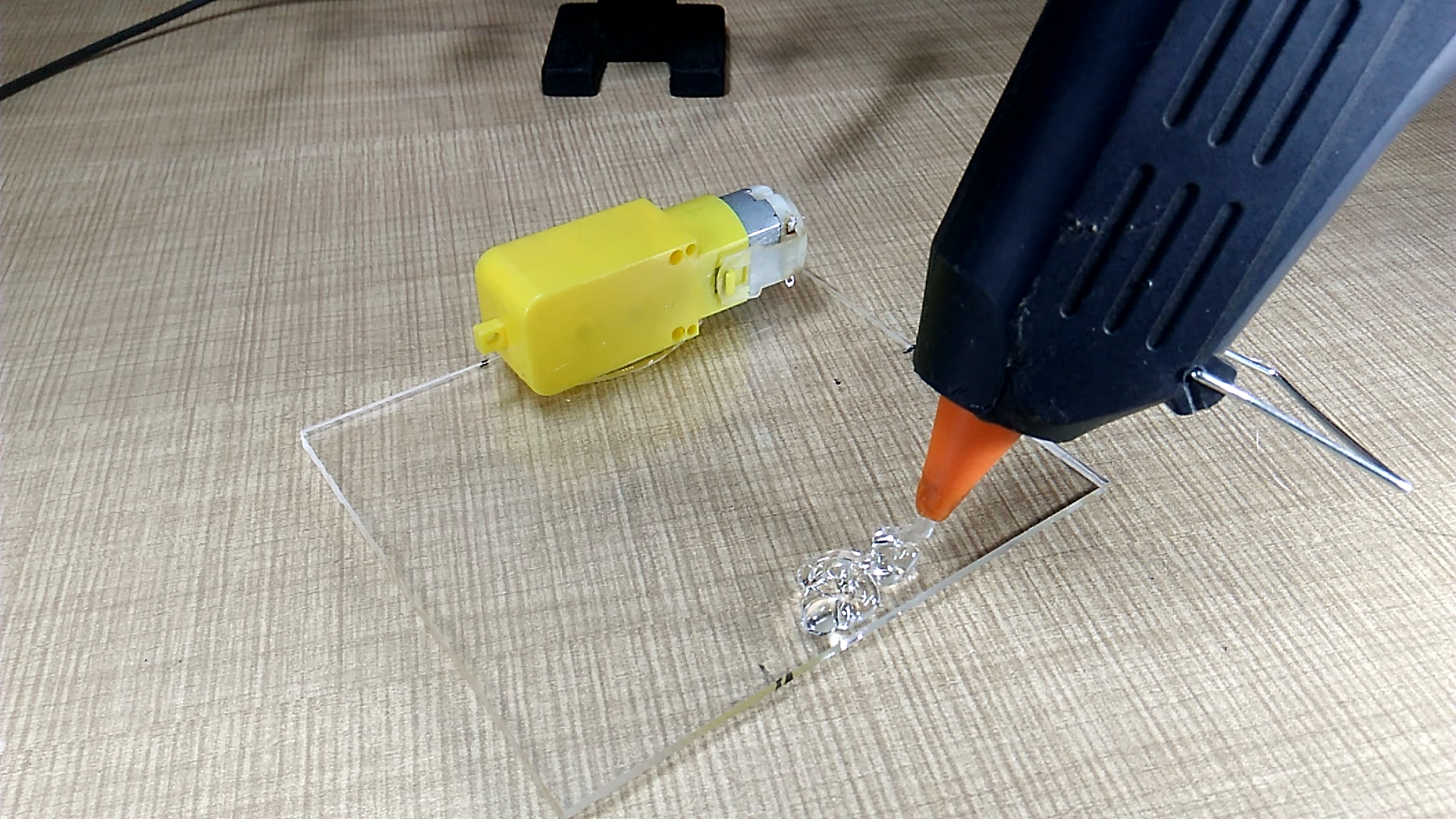
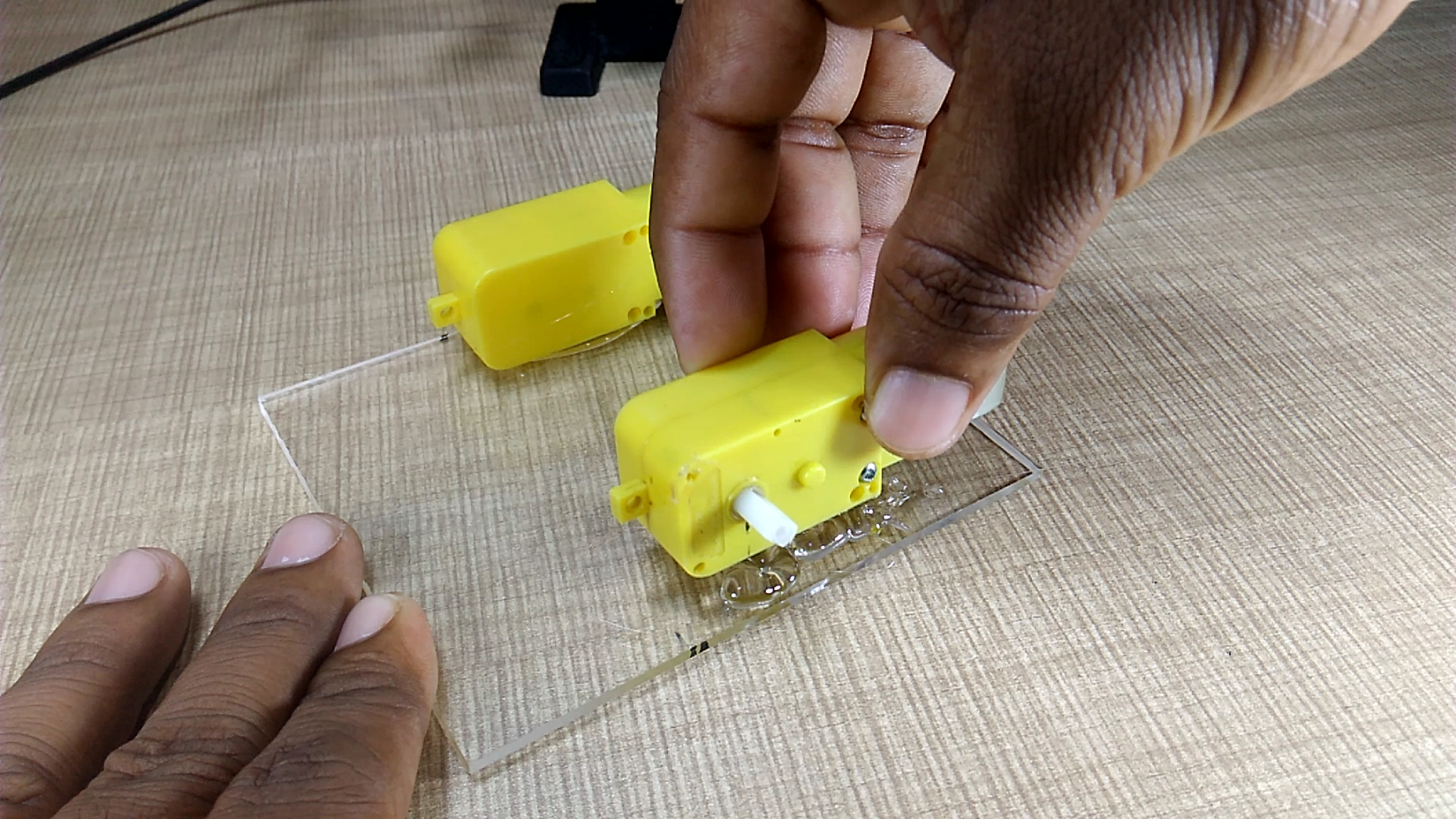
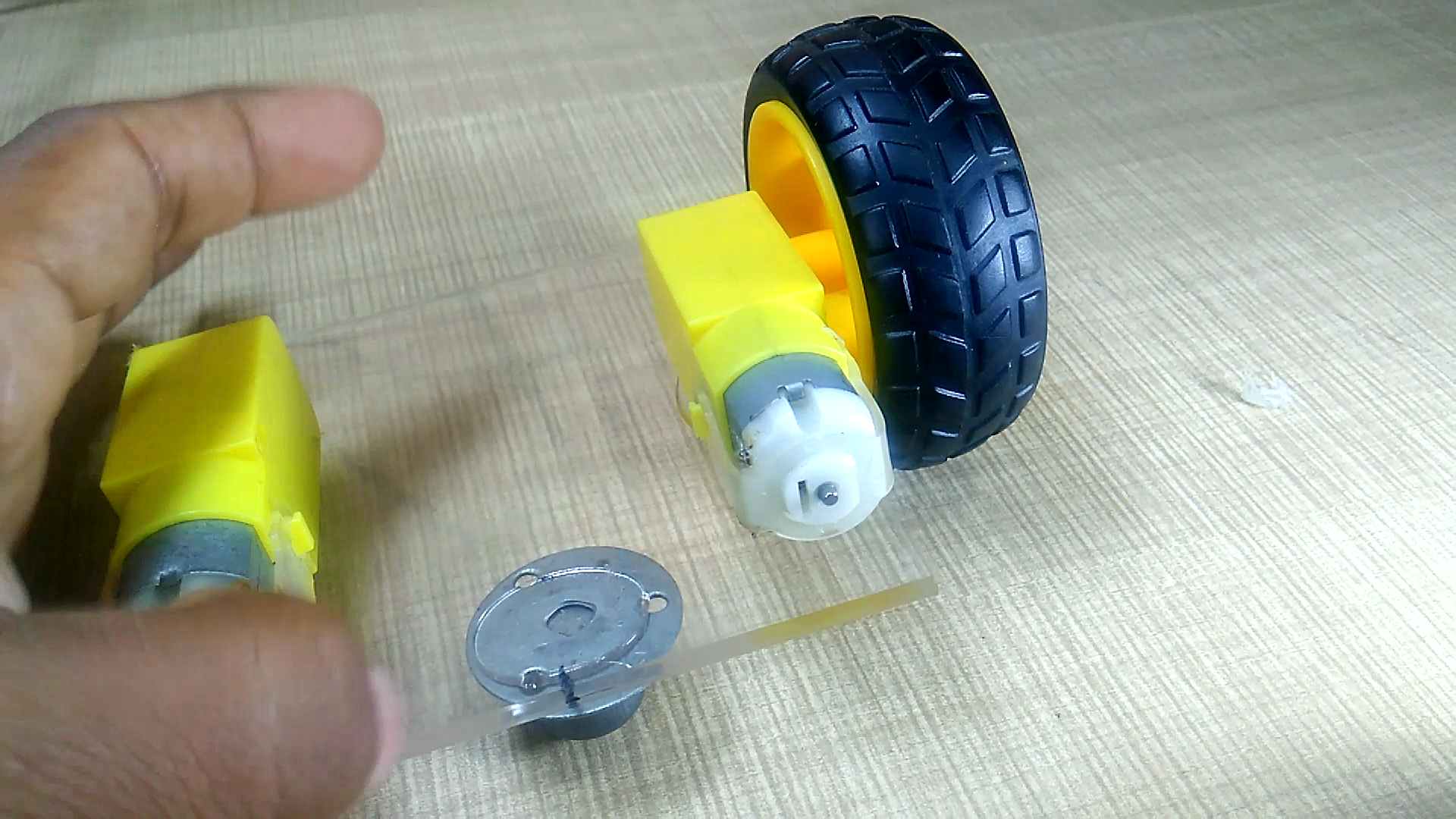
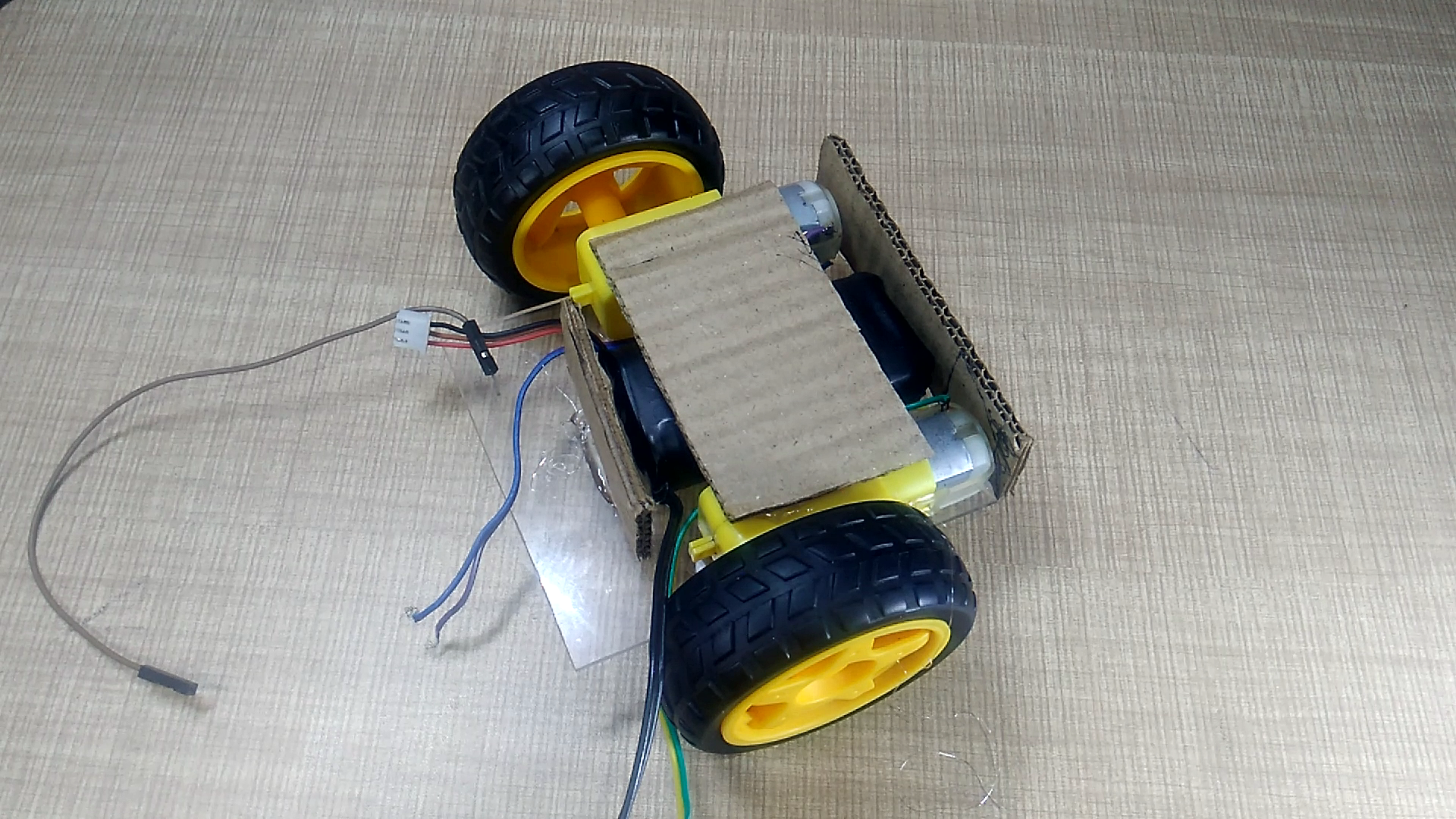
Fije todos los componentes en una lámina acrílica y haga un chasis como se muestra en las imágenes.


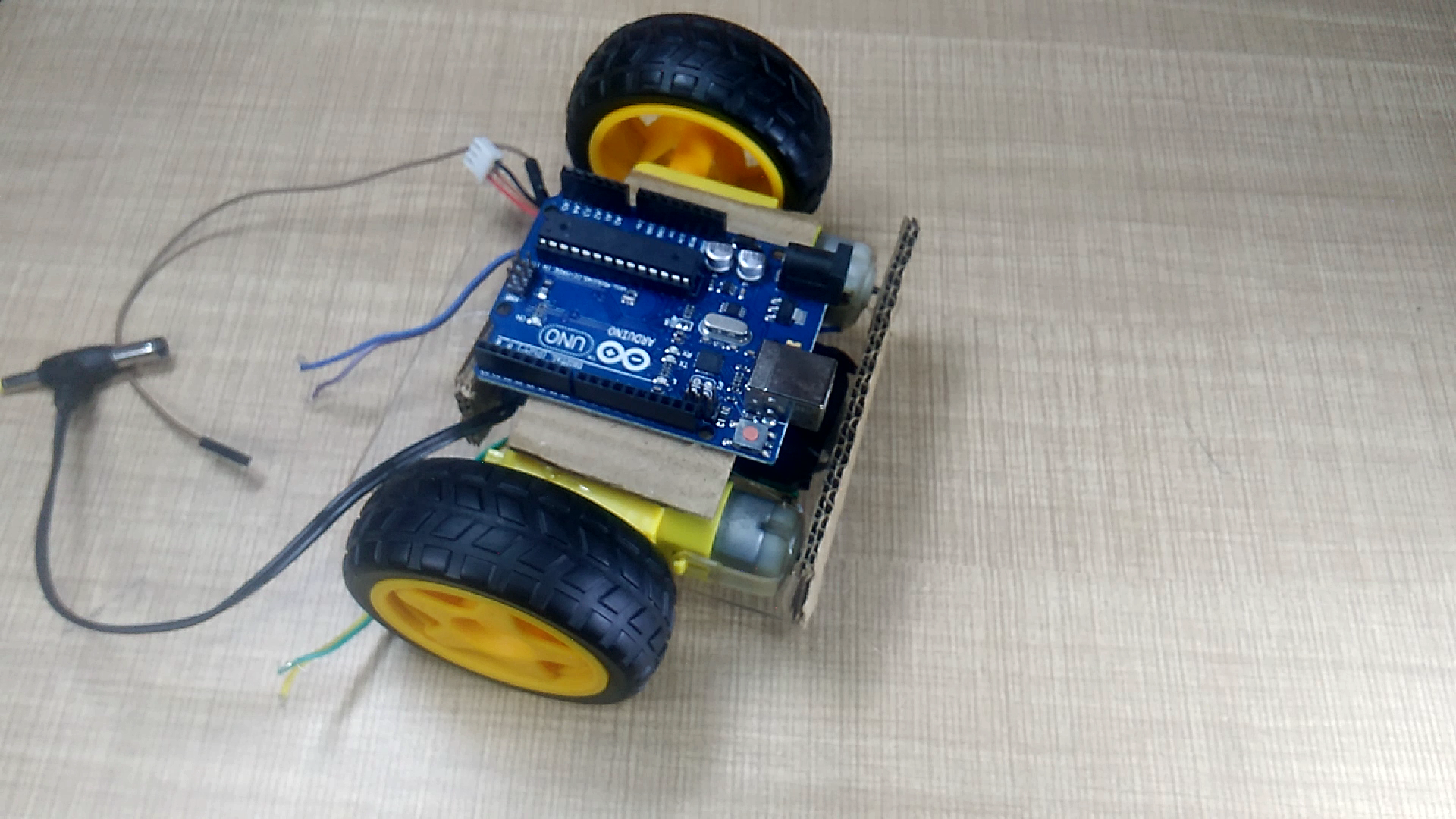

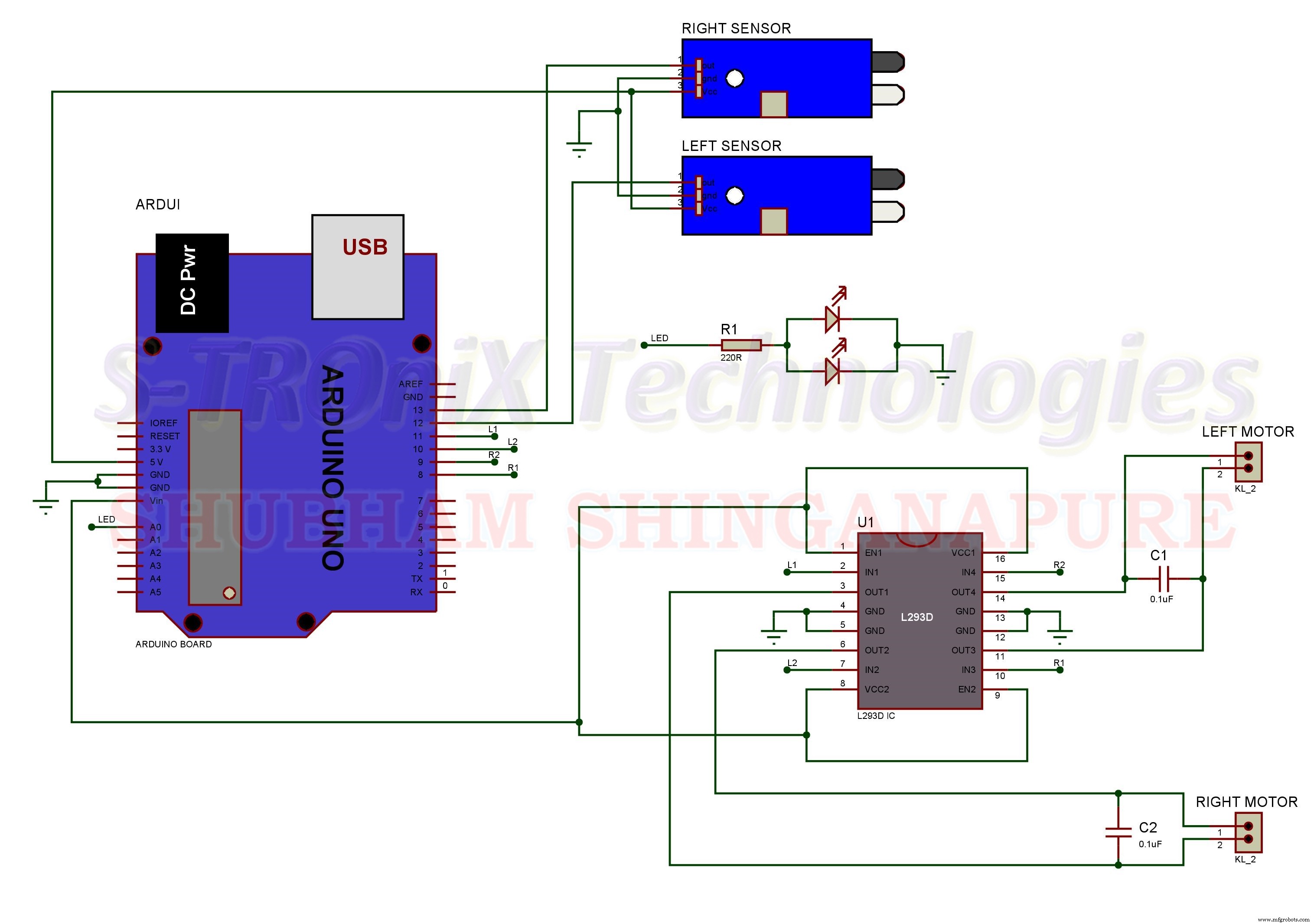
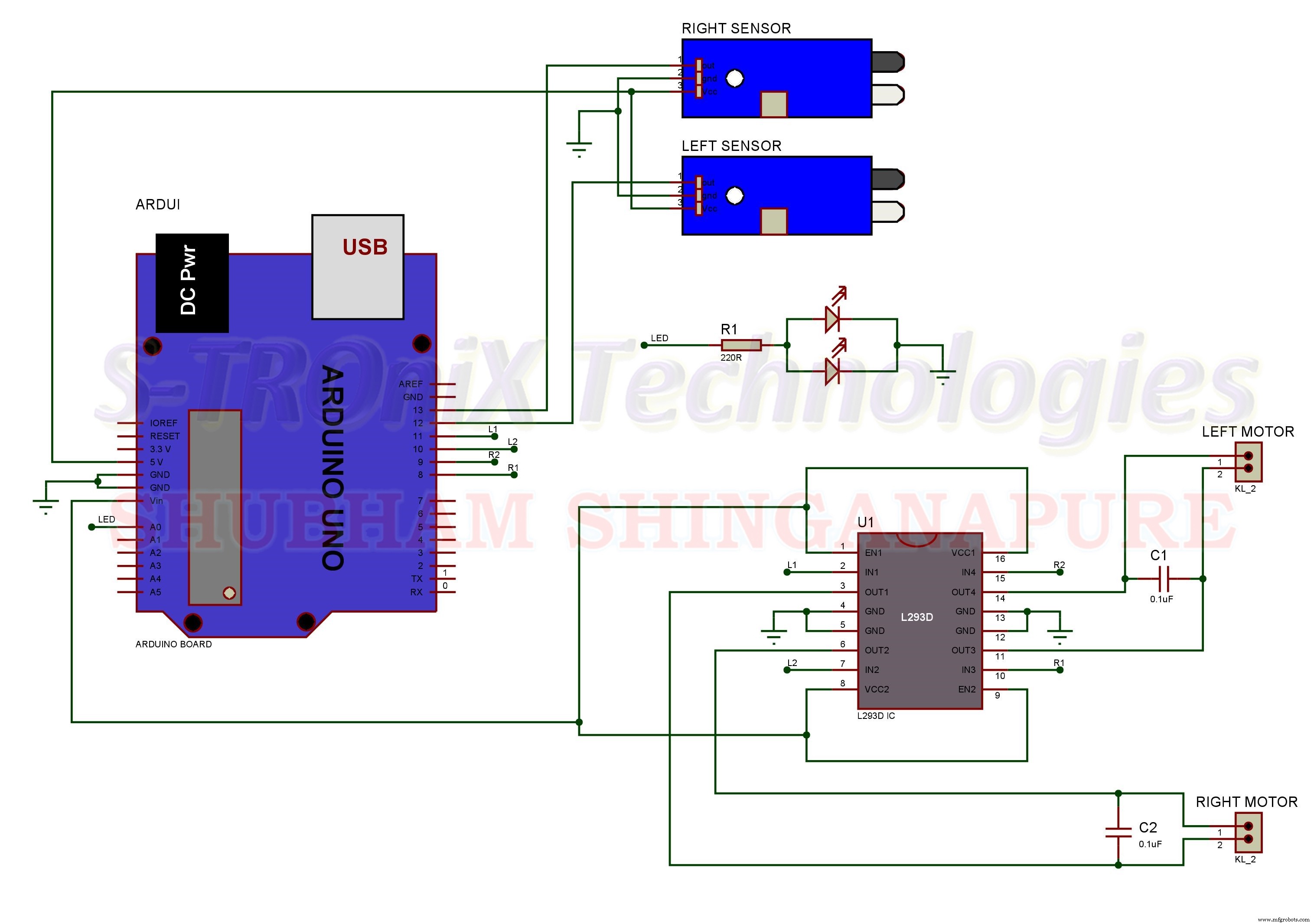
Ahora haga todas las conexiones según el diagrama de circuito a continuación.
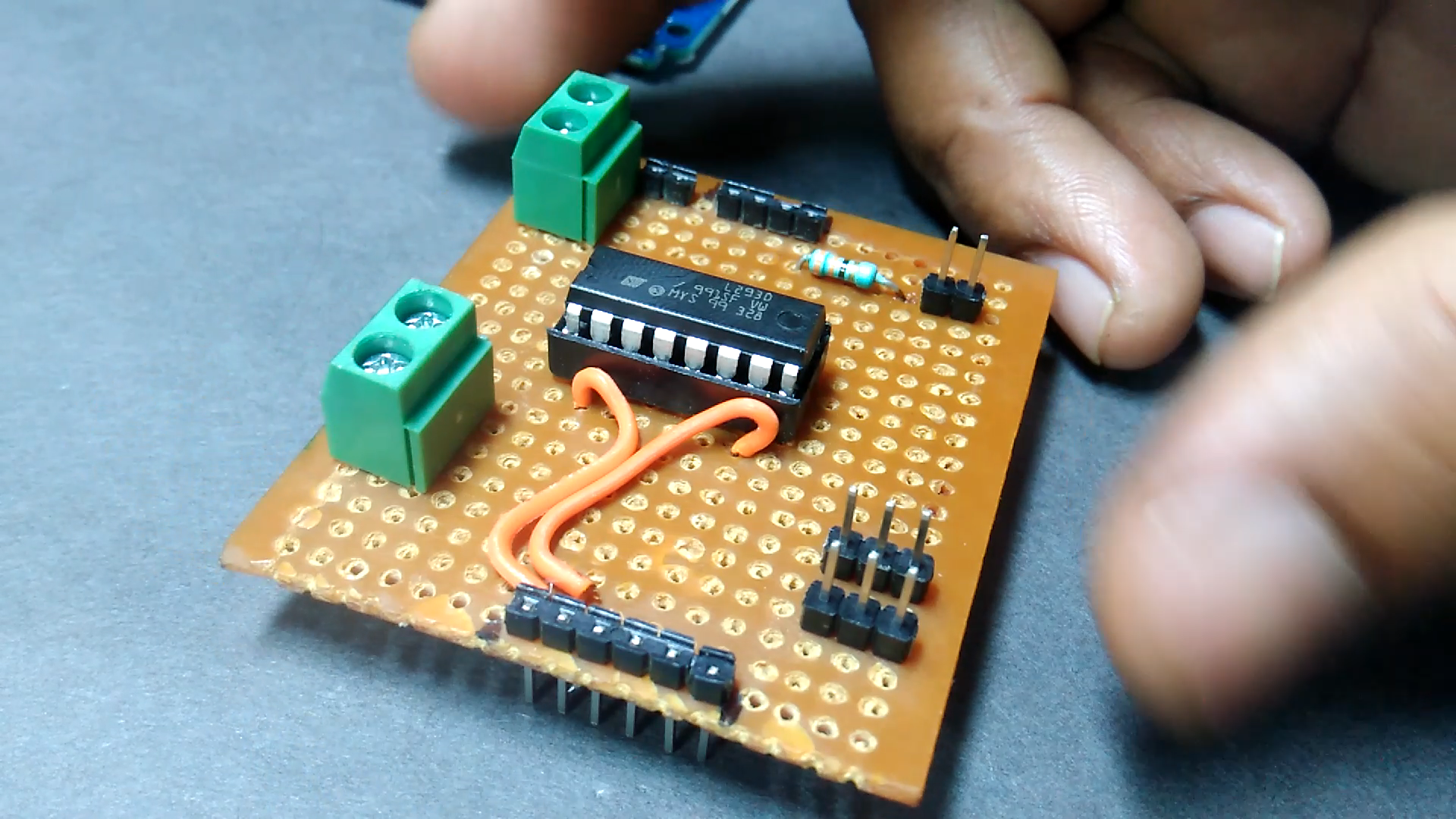
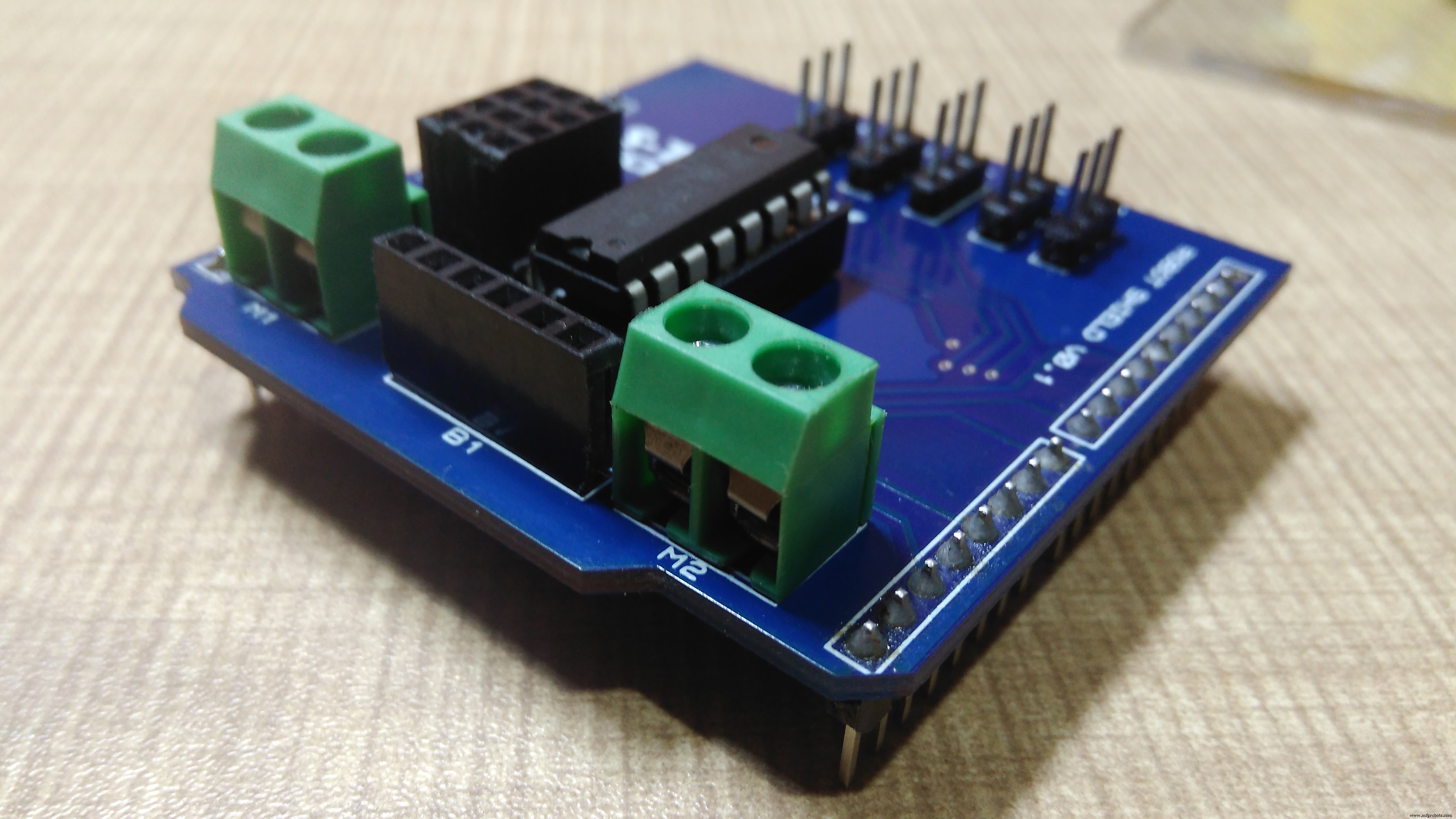
puede hacer este circuito en una placa de circuito impreso con puntos como este.
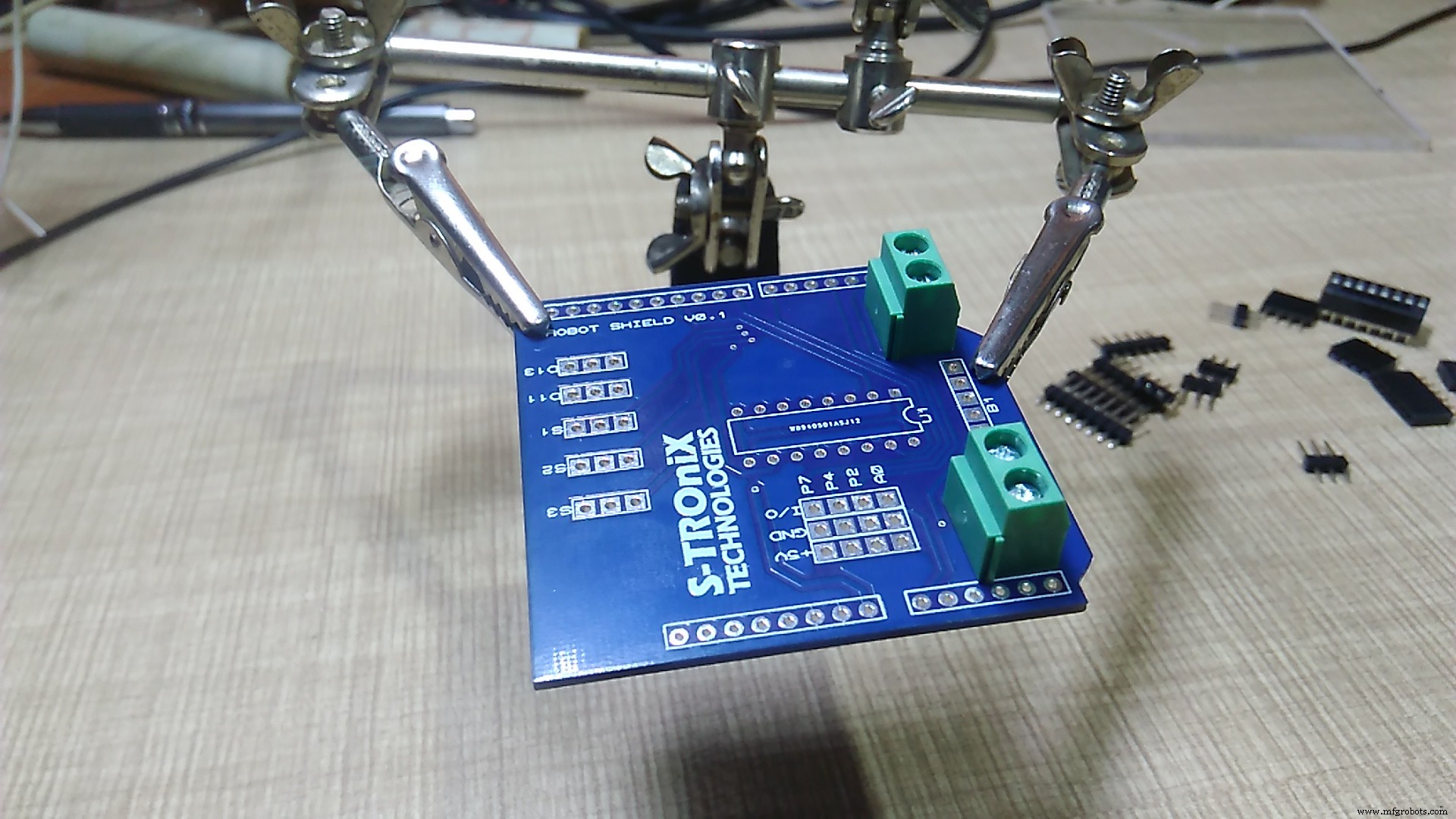
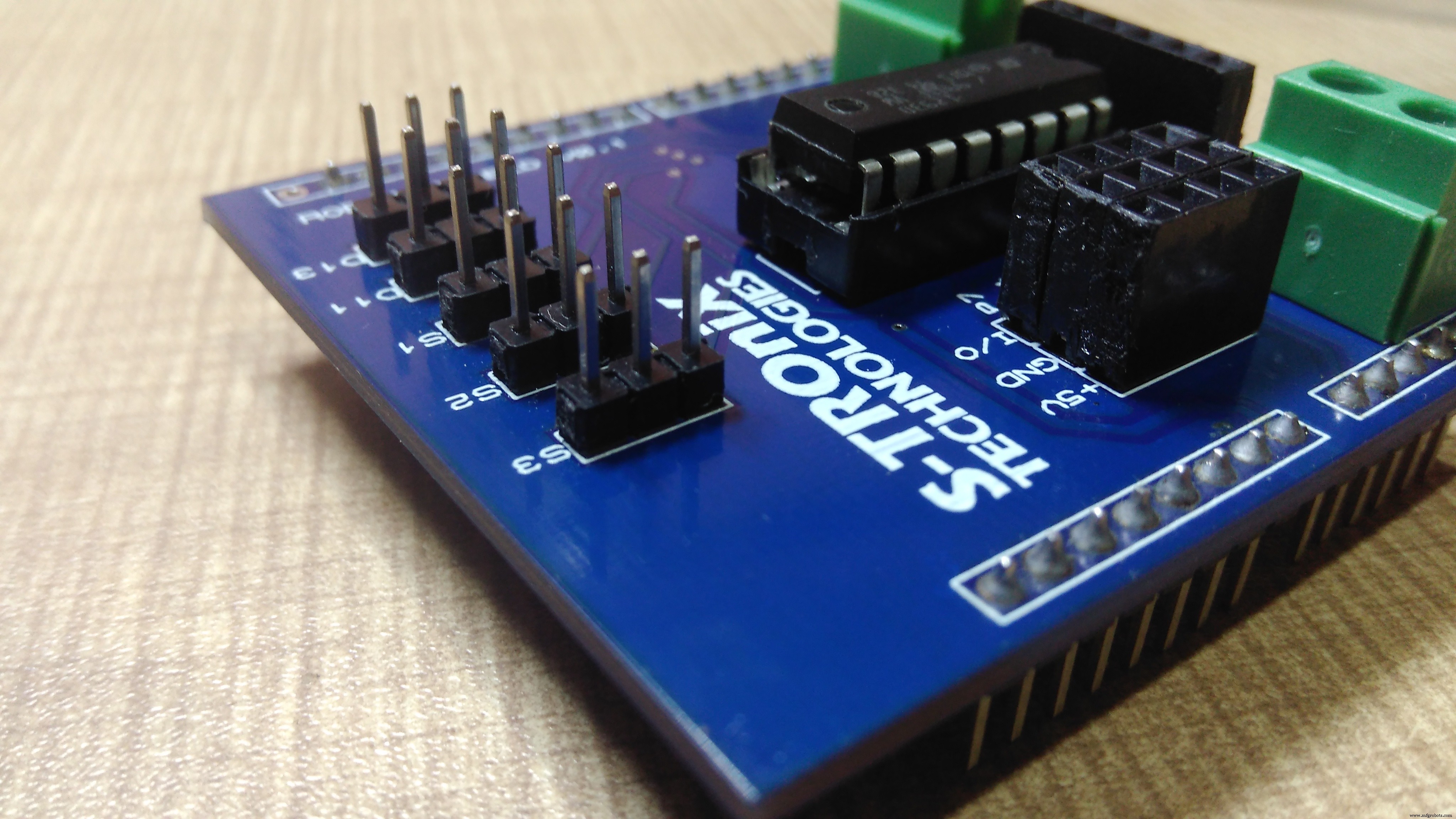
o puede utilizar este tipo de PCB de aspecto profesional.
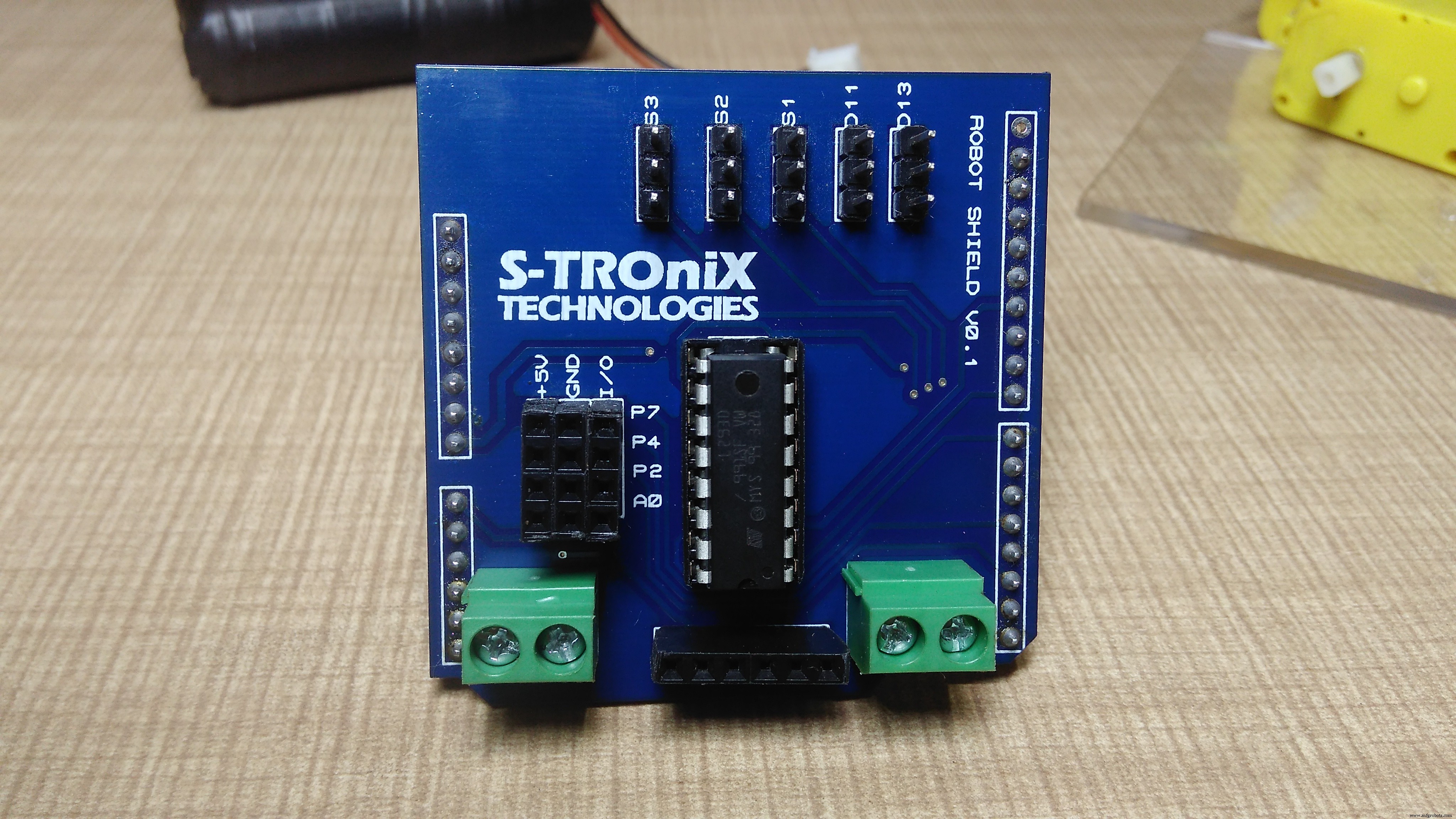
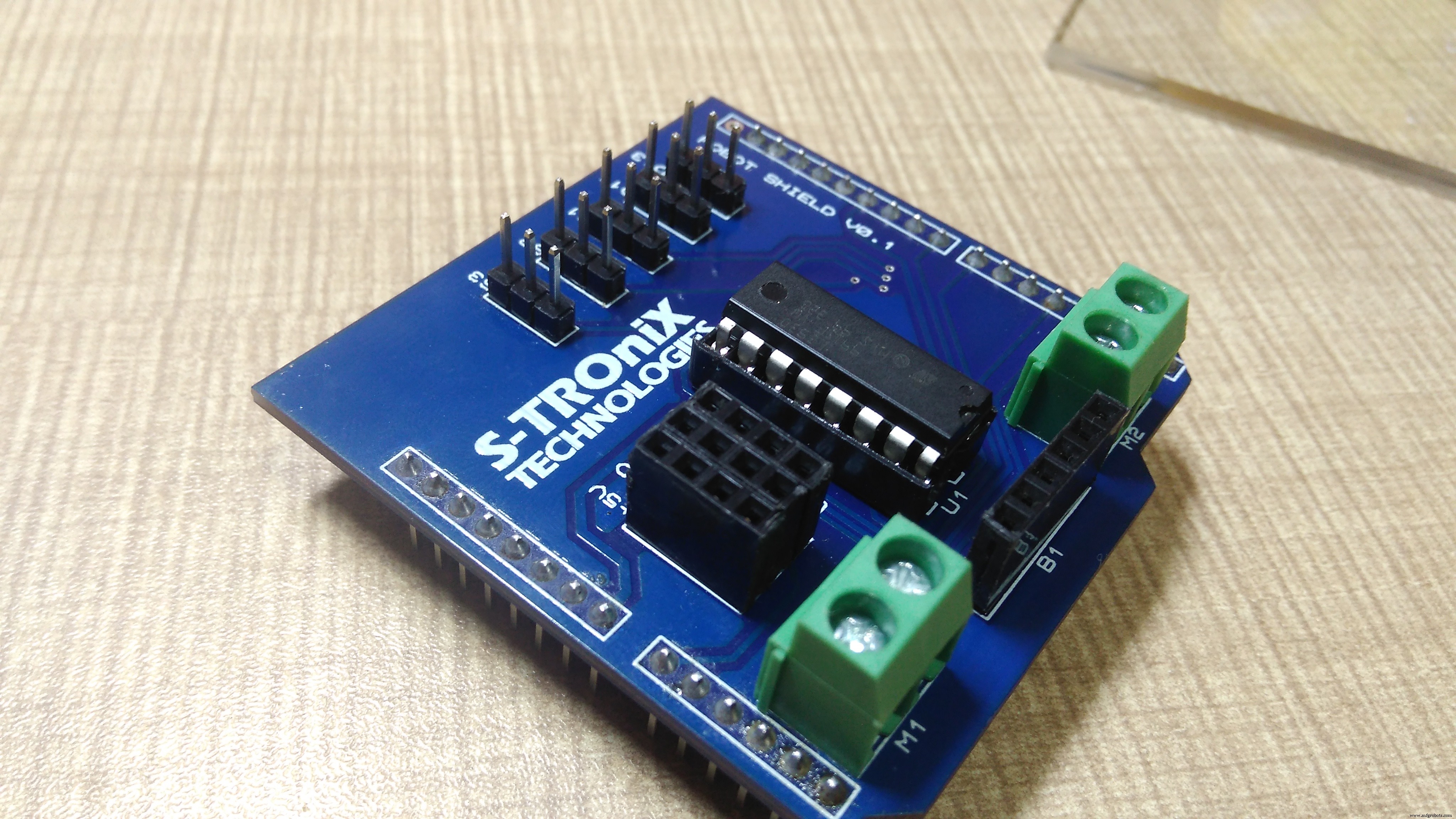
puede solicitar PCB para este escudo desde aquí https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
o para un escudo ya hecho contáctenos en:https://www.facebook.com/STROniXTechnologies
Ahora es el momento de programar este robot. sube este programa a arduino y listo.
// programa de Shubham Shinganapure el 05-08-2019
//
// para Robot de seguimiento de línea usando sensores 2IR
int lm1 =8; // salida del motor izquierdo 1
int lm2 =9; // salida del motor izquierdo 2
int rm1 =10; // salida del motor derecho 1
int rm2 =11; // salida del motor derecho 2
int sl =13; // entrada del sensor 1 (izquierda)
int sr =12; // entrada del sensor 2 (derecha)
int SlV =0;
int SrV =0;
int led =A0;
void setup ()
{
pinMode (lm1, SALIDA);
pinMode (lm2, SALIDA);
pinMode (rm1, SALIDA);
pinMode (rm2, SALIDA);
pinMode (led, SALIDA);
pinMode (sl, INPUT);
pinMode (sr, INPUT);
sTOP ();
}
bucle vacío ()
{
SlV =digitalRead (sl);
SrV =digitalRead (sr);
if (SrV ==LOW &&SlV ==LOW)
{
ForWard ( );
}
if (SrV ==HIGH &&SlV ==LOW)
{
Left ();
}
if (SrV ==LOW &&SlV ==HIGH)
{
Derecha ();
}
if (SrV ==HIGH &&SlV ==HIGH)
{
STOP ();
}
}
void ForWard ()
{
digitalWrite (lm1, HIGH);
digitalWrite (lm2, LOW);
digitalWrite (rm1, HIGH);
digitalWrite (rm2, LOW);
}
void BackWard ()
{
digitalWrite (lm1, LOW);
digitalWrite (lm2, HIGH);
digitalWrite (rm1, LOW);
digitalWrite (rm2, HIGH);
}
void Left ()
{
digitalWrit e (lm1, LOW);
digitalWrite (lm2, HIGH);
digitalWrite (rm1, HIGH);
digitalWrite (rm2, LOW);
}
void Derecha ()
{
digitalWrite (lm1, HIGH);
digitalWrite (lm2, LOW);
digitalWrite (rm1, LOW);
digitalWrite (rm2, HIGH );
}
void STOP ()
{
digitalWrite (lm1, LOW);
digitalWrite (lm2, LOW);
digitalWrite (rm1, BAJO);
escritura digital (rm2, BAJO);
} Para más suscríbete a mi canal de youtube:
Código
- robot seguidor de línea
robot seguidor de línea Arduino
// programa de Shubham Shinganapure el 05-08-2019 //// para Robot de seguimiento de línea usando sensores 2IR int lm1 =8; // salida del motor izquierdo 1int lm2 =9; // salida del motor izquierdo 2int rm1 =10; // salida del motor derecho 1int rm2 =11; // salida del motor derecho 2int sl =13; // sensor 1 entrada (izquierda) int sr =12; // entrada del sensor 2 (derecha) int SlV =0; int SrV =0; int led =A0; void setup () {pinMode (lm1, OUTPUT); pinMode (lm2, SALIDA); pinMode (rm1, SALIDA); pinMode (rm2, SALIDA); pinMode (led, SALIDA); pinMode (sl, ENTRADA); pinMode (sr, INPUT); STOP ();} bucle vacío () {SlV =digitalRead (sl); SrV =digitalRead (sr); if (SrV ==BAJO &&SlV ==BAJO) {ForWard (); } si (SrV ==ALTO &&SlV ==BAJO) {Izquierda (); } si (SrV ==BAJO &&SlV ==ALTO) {Derecha (); } si (SrV ==ALTO &&SlV ==ALTO) {PARADA (); }} void ForWard () {digitalWrite (lm1, HIGH); escritura digital (lm2, BAJA); escritura digital (rm1, ALTA); digitalWrite (rm2, BAJO); } void BackWard () {digitalWrite (lm1, LOW); escritura digital (lm2, ALTA); digitalWrite (rm1, BAJO); escritura digital (rm2, ALTA); } void Left () {digitalWrite (lm1, LOW); escritura digital (lm2, ALTA); escritura digital (rm1, ALTA); digitalWrite (rm2, BAJO); } void Derecha () {digitalWrite (lm1, HIGH); escritura digital (lm2, BAJA); digitalWrite (rm1, BAJO); escritura digital (rm2, ALTA); } void STOP () {digitalWrite (lm1, LOW); escritura digital (lm2, BAJA); digitalWrite (rm1, BAJO); digitalWrite (rm2, BAJO); } Esquemas
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Robot Pi simple
- Obstáculos que evitan el robot con servomotor
- Joy Robot (Robô Da Alegria)
- Robot seguidor de línea de velocidad V4
- Robot controlado por voz
- Robot de piano controlado por Arduino:PiBot
- Plataforma de entrenamiento Arduino
- Robot asistente doméstico autónomo
- Robot seguidor de línea de control PID
- Robot para navegación interior supercogedora