


Tirador de Lego automatizado
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 |
Herramientas y máquinas necesarias
| |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
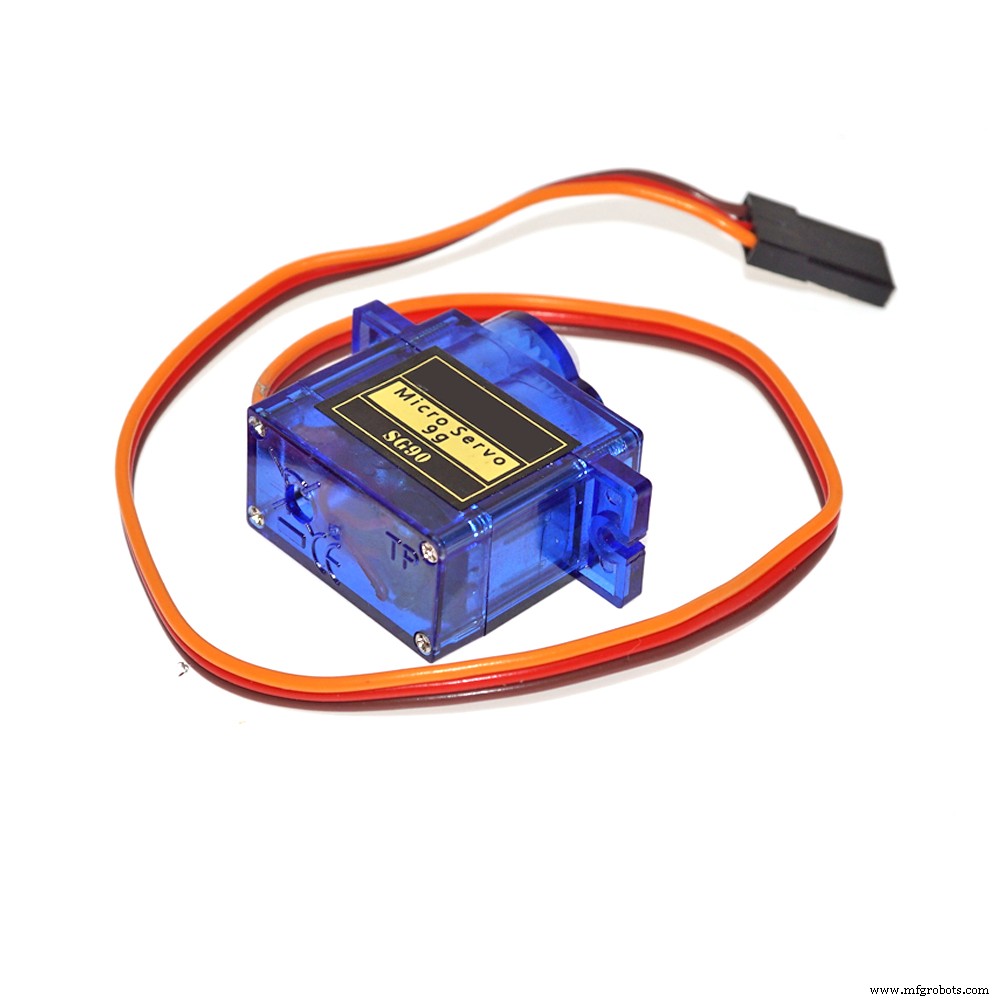
Este proyecto trata de conseguir que los cañones de Lego disparen automáticamente. Me gusta jugar con legos y me gusta usar Arduinos, así que decidí hacer este proyecto en mi tiempo libre. Los servomotores, con sus cuernos adjuntos, giran golpeando la palanca y disparando el cañón. ¡Un gran primer, segundo o tercer proyecto para principiantes!
Esta es una guía paso a paso sobre cómo hacerlo.
Paso 1:el hardware
Paso 1 Parte 1: Hardware Básicos
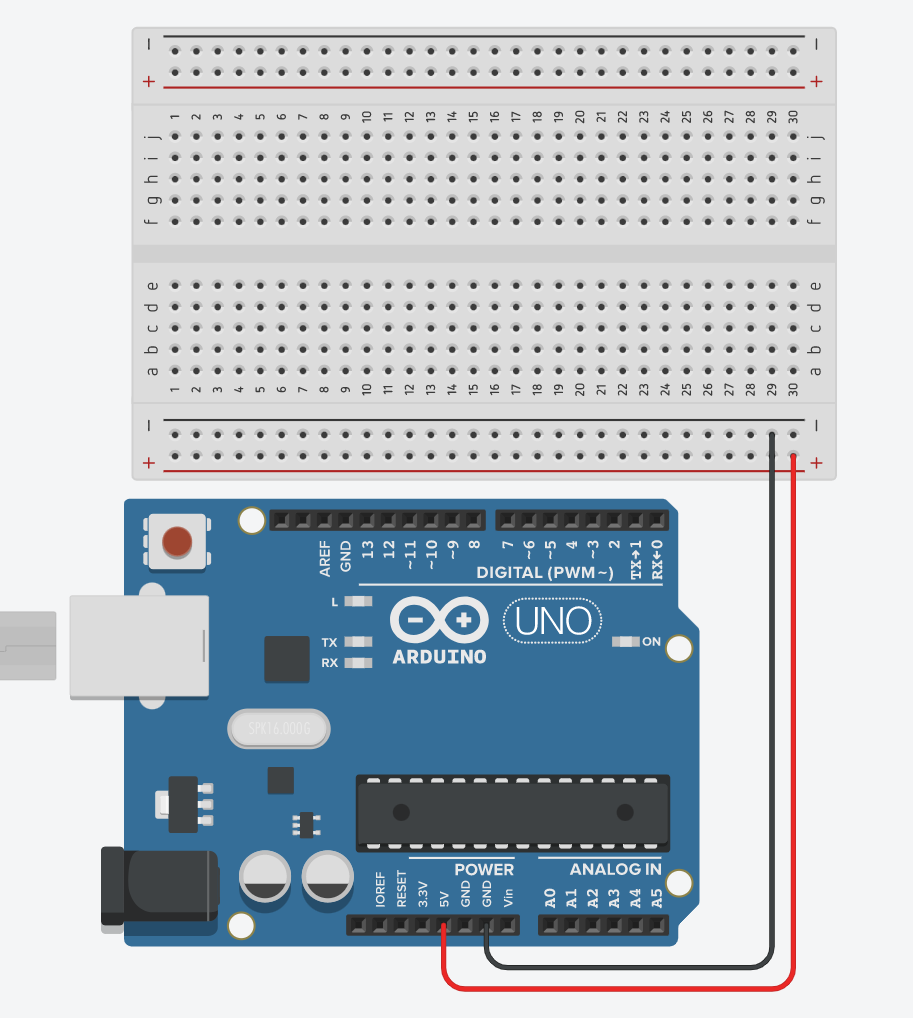
Comience con 5V yendo a la fila cargada positivamente y GRND yendo a la fila cargada negativamente. Se verá así:
Paso 1 Parte 2:Conexión del servo n. ° 1
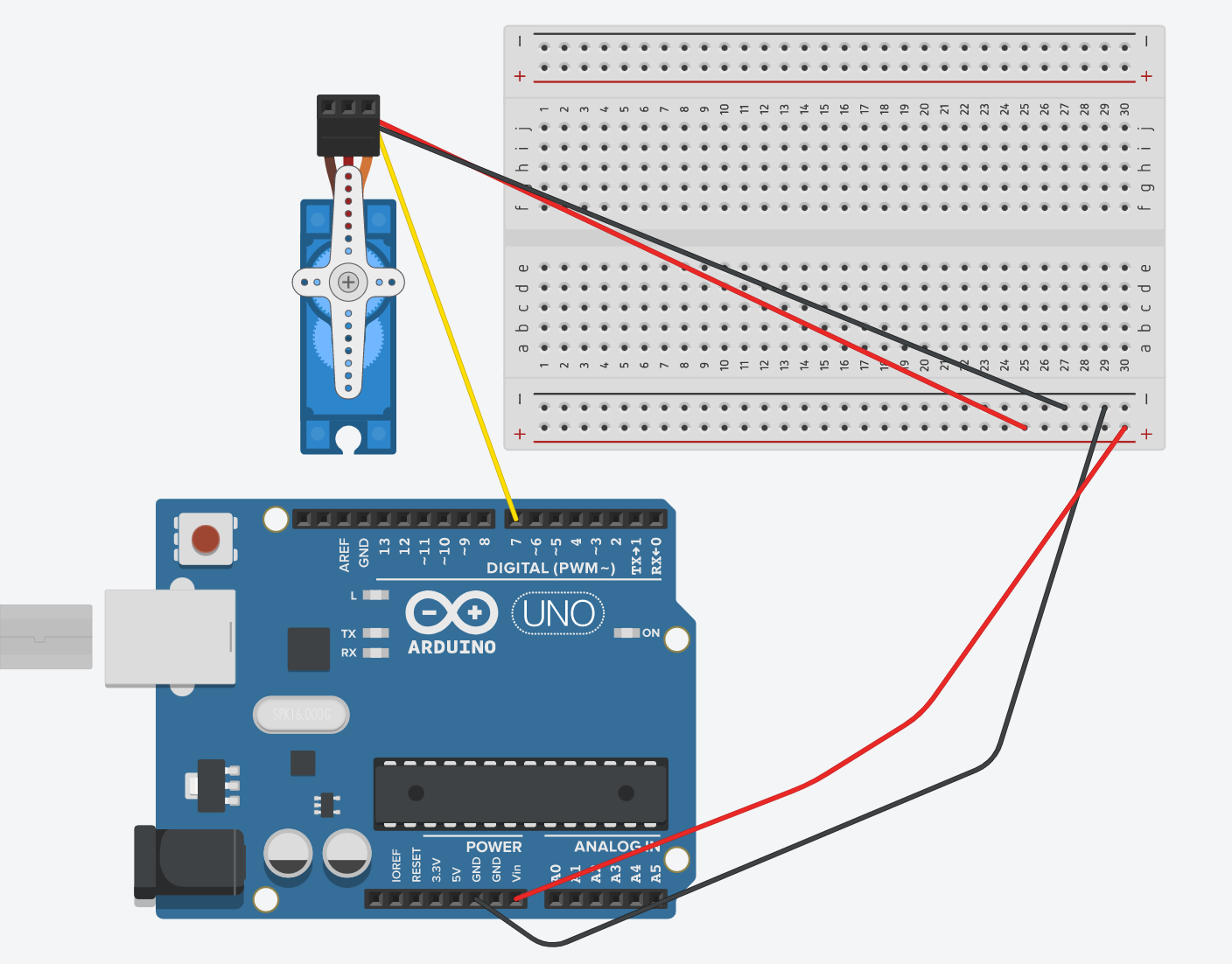
El servo tiene tres cables:el naranja / amarillo (señal) ocupará una ranura en el DIGITAL (PWM ~), el rojo (alimentación) irá a VIN (que es cualquier pin en la fila positiva) y el El cable negro / marrón (GRND) irá a la fila cargada negativamente conectada al pin GRND del Uno. El pin digital que usé para mi primer servo es 7. Así es como se ve el esquema cuando el primer servo está enganchado:
Paso 1, parte 3:cableado del resto de los servos
Una vez que lo domine con los servos, el resto debería ser muy sencillo. Sin embargo, una cosa a tener en cuenta:debe ser coherente con los pines digitales que adjuntó con su servo en el código.
Por ejemplo, el código (que se puede encontrar en la parte inferior de la página), dice:
secondCannon.attach (8); Por lo tanto, el segundo Servo debe estar conectado al pin digital 8.
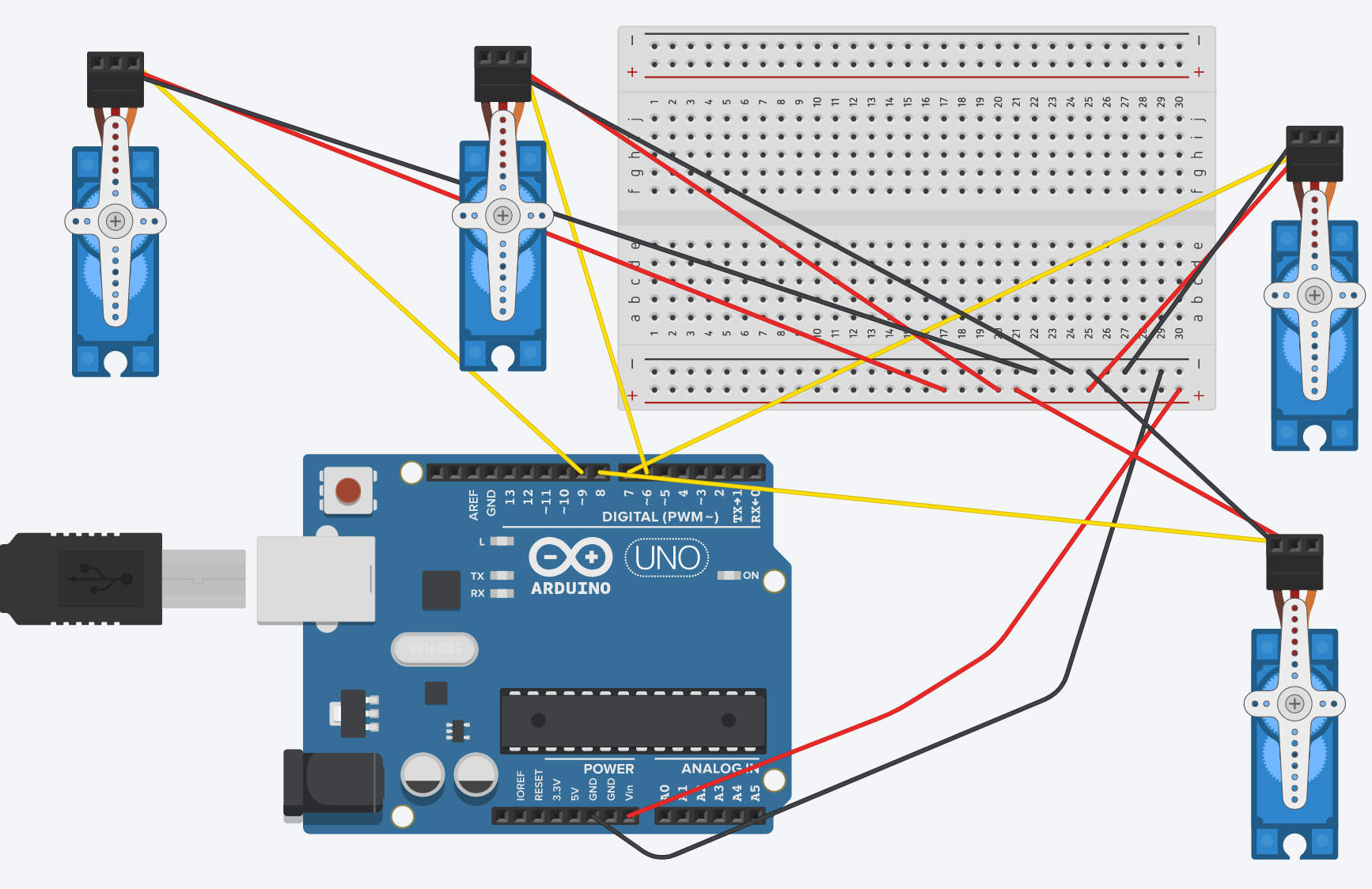
De la misma manera, el tercer Servo debe estar conectado al pin digital 6, y el cuarto debe estar conectado al noveno pin digital.
Sin embargo, estos se pueden cambiar para que estén en el orden que desee. Solo asegúrese de cambiar tanto el hardware como el software para mantener la coherencia; de lo contrario, el código no funcionará.
Para ejecutar con el código proporcionado en la parte inferior, así es como debería verse el esquema:

¡Felicidades! Has completado oficialmente la parte de hardware de este proyecto.
Paso 2:el software
Ahora, copie y pegue el código en la parte inferior de la página en un boceto de Arduino y cárguelo. Asegúrese de tener la biblioteca Servo antes de cargar el código, de lo contrario, no funcionará. A continuación se muestra una guía paso a paso que explica el código y lo que significa cuando se ejecuta el programa.
#include // Incluyendo la biblioteca para ServosServo firstCannon; // Definiendo el Primer Cañón como un ServoServo secondCannon; // Definiendo el Segundo Cañón como un ServoServo thirdCannon; // Definiendo el Tercer Cañón como un ServoServo 4thCannon; // Definiendo el cuarto cañón como un servo
Este código configura el Servo.h biblioteca, que jugará un papel fundamental en el código. Esto se puede mostrar en las siguientes líneas, usando la biblioteca para definir cuatro cañones como Servos, o motores que se pueden girar 180 grados.
void setup () {// Código de configuración, o código que solo se ejecuta una vez Serial.begin (9600); // Iniciar la comunicación serial Serial.println ("¡Defiende a los clones! ¡Configura las defensas!") // Imprime algo en el Monitor serial firstCannon.attach (7); // Conecte el pin digital 7 al primer cañón secondCannon.attach (8); // Conecte el pin digital 8 al segundo cañón thirdCannon.attach (6); // Conecte el pin digital 6 al tercer cañón fourCannon.attach (9); // Adjunte el pin digital 9 al cuarto cañón}
El void setup () El código se usa en casi cualquier proyecto Arduino, y es un código que solo se ejecuta una vez. En este caso, estamos iniciando la comunicación serial de nueva línea a 9600 baudios. Luego, estamos imprimiendo cosas en Serial Monitor. Para programar los Servos, tenemos que conectar sus nombres a sus respectivos pines digitales. Este es el propósito del .attach () fragmento de código.
void loop () {// Código de bucle, o código que se ejecuta una cantidad infinita de veces Serial.println ("Secuencia de inicio de disparo") // Imprime algo en el Serial Monitor firstCannon.write (180); // Gira el primer servo 180 grados, activando el primer retardo del cañón (100); // Espera 1/10 de un segundo firstCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo secondCannon.write (180); // Gira el segundo servo 180 grados, activando el retardo del segundo cañón (100); // Espera 1/10 de un segundo secondCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo thirdCannon.write (180); // Gira el tercer servo 180 grados, activando la demora del tercer cañón (100); // Espere 1/10 de un segundo thirdCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo 4thCannon.write (180); // Gira el primer cuarto 180 grados, activando el retardo del cuarto cañón (100); // Espera 1/10 de un segundo cuarto.Cannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo Serial.println ("Todos los cañones disparados"); Serial.println ("Preparar para recargar"); retraso (10000); Serial.println ("Recarga completa. Preparándose para disparar de nuevo")}
Esta es la pieza final del código, usando el void bucle () función que permite ejecutar el siguiente código una cantidad infinita de veces. Luego, imprimimos en el Serial Monitor que los cañones están a punto de disparar. Los servos de cada cañón deben girar 180 grados y luego regresar a la posición original, uno a la vez. Después de eso, debería haber 10 segundos (tiempo de recarga) hasta que el proceso se repita nuevamente.
Si tiene algún otro problema al cargar el código, puede comentar en la sección de comentarios y le responderé lo antes posible. Si funciona, continúe con el siguiente paso.
Paso 3:instalación
El último paso requiere los cañones de lego y un poco de cinta regular anticuada. El cañón de lego se ve así:

Ejecute el código. Vea en qué dirección gira el servo. Pega el servo en el cañón de lego para que su trayectoria lo coloque en un curso de colisión con la palanca en la parte superior del cañón en la imagen de arriba.
¡Buen trabajo! Has terminado oficialmente este proyecto. Como dije, comente en la sección a continuación si tiene alguna pregunta.
Si le gustó este proyecto, consulte estos enlaces:
https://create.arduino.cc/projecthub/342600/basketball-hoop-with-buzzer-using-an-arduino-693bad?ref=user&ref_id=1536504&offset=1
https://create.arduino.cc/projecthub/ShreyanR/soundbox-826a56
Código
- Código de tirador de armas de Lego
Código de tirador de armas de Lego C / C ++
Pegue esto en Arduino IDE#include// Incluyendo la biblioteca para ServosServo firstCannon; // Definiendo el Primer Cañón como un ServoServo secondCannon; // Definiendo el Segundo Cañón como un ServoServo thirdCannon; // Definiendo el Tercer Cañón como un ServoServo 4thCannon; // Definiendo el Cuarto Cañón como una configuración de Servovoid () {// Código de configuración, o código que solo se ejecuta una vez Serial.begin (9600); // Iniciar la comunicación serial Serial.println ("¡Defiende a los clones! ¡Configura las defensas!") // Imprime algo en el Monitor serial firstCannon.attach (7); // Conecte el pin digital 7 al primer cañón secondCannon.attach (8); // Conecte el pin digital 8 al segundo cañón thirdCannon.attach (6); // Conecte el pin digital 6 al tercer cañón fourCannon.attach (9); // Adjunte el Pin digital 9 al Cuarto Cañón} void loop () {// Código de bucle, o código que se ejecuta una cantidad infinita de veces Serial.println ("Secuencia de disparo inicial") // Imprima algo en el Monitor serial firstCannon. escribir (180); // Gira el primer servo 180 grados, activando el primer retardo del cañón (100); // Espera 1/10 de un segundo firstCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo secondCannon.write (180); // Gira el segundo servo 180 grados, activando el retardo del segundo cañón (100); // Espera 1/10 de un segundo secondCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo thirdCannon.write (180); // Gira el tercer servo 180 grados, activando la demora del tercer cañón (100); // Espere 1/10 de un segundo thirdCannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo 4thCannon.write (180); // Gira el primer cuarto 180 grados, activando el retardo del cuarto cañón (100); // Espera 1/10 de un segundo cuarto.Cannon.write (0); // Devuelve el Servo a la posición original en preparación para el retardo de recarga (1000); // Espere 1 segundo Serial.println ("Todos los cañones disparados"); Serial.println ("Preparar para recargar"); retraso (10000); Serial.println ("Recarga completa. Preparándose para disparar de nuevo")}
Esquemas
Proceso de manufactura