


Selsyn (Synchro) Motors
Normalmente, los devanados del rotor de un motor de inducción de rotor bobinado se cortocircuitan después del arranque. Durante el arranque, la resistencia se puede colocar en serie con los devanados del rotor para limitar la corriente de arranque. Si estos devanados están conectados a una resistencia de arranque común, los dos rotores permanecerán sincronizados durante el arranque.
Esto es útil para imprentas y puentes levadizos, donde dos motores deben sincronizarse durante el arranque. Una vez arrancado y los rotores en cortocircuito, el par de sincronización está ausente. Cuanto mayor sea la resistencia durante el arranque, mayor será el par de sincronización para un par de motores.
Si se retiran las resistencias de arranque, pero los rotores aún están en paralelo, no hay par de arranque. Sin embargo, existe un par de sincronización sustancial. Esto se llama selsyn , que es una abreviatura de "autosincrónico".
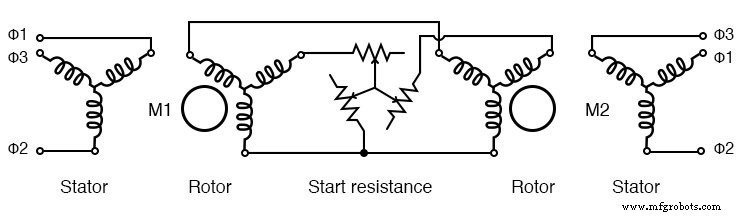
Arranque de motores de inducción de rotor bobinado desde resistencias comunes
Los rotores pueden estar estacionarios. Si un rotor se mueve en un ángulo θ, el otro eje selsyn se moverá en un ángulo θ. Si se aplica arrastre a un selsyn, esto se sentirá al intentar rotar el otro eje.
Si bien existen selsyns de varios caballos de fuerza (varios kilovatios), la aplicación principal son pequeñas unidades de unos pocos vatios para aplicaciones de instrumentación:indicación de posición remota.
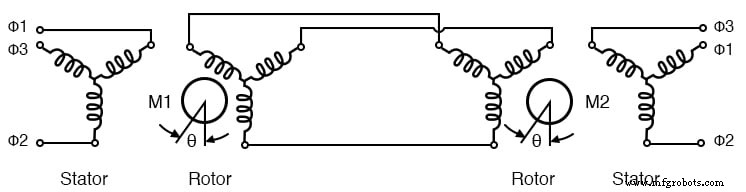
Selsyns sin resistencia inicial
Los selsyns de instrumentación no sirven para arrancar resistencias (figura anterior). No están diseñados para rotar automáticamente. Dado que los rotores no están en cortocircuito ni la resistencia está cargada, no se desarrolla un par de arranque.
Sin embargo, la rotación manual de un eje producirá un desequilibrio en las corrientes del rotor hasta que le siga el eje de la unidad paralela. Tenga en cuenta que se aplica una fuente común de energía trifásica a ambos estatores. Aunque mostramos rotores trifásicos arriba, un rotor alimentado monofásico es suficiente como se muestra en la siguiente figura.
Transmisor - Receptor
Selsyns pequeños de instrumentación, también conocidos como synchros , utiliza rotores monofásicos en paralelo, energizados por CA, que retienen los estatores trifásicos en paralelo, que no están energizados externamente. A continuación se muestra la función sincronizada como transformadores rotativos.
Si los rotores de ambos transmisor de par (TX) y receptor de par (RX) están en el mismo ángulo, las fases de los voltajes del estator inducidos serán idénticas para ambos y no fluirá corriente.
Si un rotor se desplaza del otro, los voltajes de fase del estator serán diferentes entre el transmisor y el receptor. La corriente del estator fluirá desarrollando par. El eje del receptor se esclaviza eléctricamente al eje del transmisor. Se puede girar el eje del transmisor o del receptor para girar la unidad opuesta.
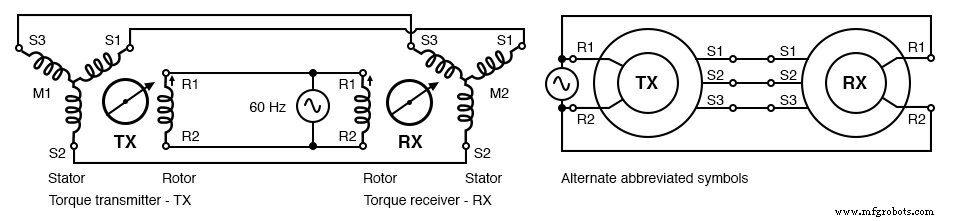
Synchros tienen rotores monofásicos
Los estatores sincronizados se enrollan con devanados trifásicos que se llevan a terminales externos. El devanado de un solo rotor de un transmisor o receptor de par se realiza mediante anillos colectores cepillados. Los transmisores y receptores sincronizados son eléctricamente idénticos.
Sin embargo, un receptor sincronizado tiene una amortiguación inercial incorporada. Un transmisor de par sincronizado se puede sustituir por un receptor de par.
La detección de posición remota es la principal aplicación sincronizada. Por ejemplo, un transmisor sincronizado acoplado a una antena de radar indica la posición de la antena en un indicador en una sala de control.
Un transmisor sincronizado acoplado a una veleta indica la dirección del viento en una consola remota. Los sincronizadores están disponibles para su uso con potencias de 240 V CA 50 Hz, 115 V CA 60 Hz, 115 V CA 400 Hz y 26 V CA 400 Hz.
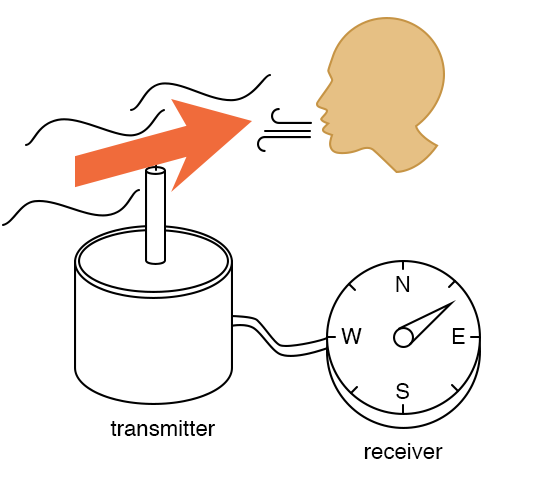
Aplicación Synchro:indicación de posición remota
Transmisor-receptor diferencial
Un transmisor diferencial sincronizado (TDX) tiene rotor y estator trifásicos. Un transmisor diferencial sincronizado agrega una entrada de ángulo del eje a una entrada de ángulo eléctrico en las entradas del rotor, generando la suma en las salidas del estator.
Este ángulo eléctrico del estator se puede mostrar enviándolo a un RX. Por ejemplo, un receptor sincronizado muestra la posición de una antena de radar en relación con la proa de un barco. La adición del rumbo de la brújula de un barco mediante un transmisor diferencial sincronizado muestra la posición de la antena en un RX en relación con el norte verdadero, independientemente del rumbo del barco.
Al invertir el par de cables del estator S1-S3 entre un TX y un TDX se restan las posiciones angulares.
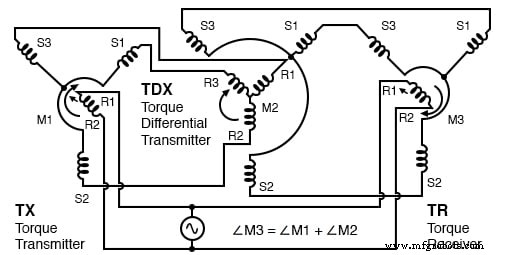
Transmisor diferencial de par (TDX)
Una antena de radar a bordo acoplada a un transmisor sincronizado codifica el ángulo de la antena con respecto a la proa del barco (figura siguiente). Se desea mostrar la posición de la antena con respecto al norte verdadero.
Necesitamos agregar los barcos que se dirigen desde un girocompás a la posición de la antena relativa a la proa para mostrar el ángulo de la antena con respecto al norte verdadero (∠antenna + ∠gyro).
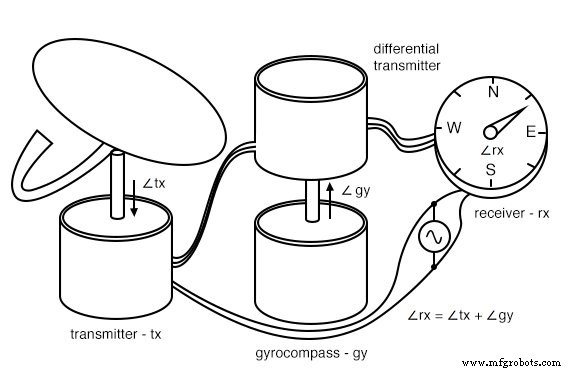
Aplicación del transmisor diferencial de par:adición angular
∠antenna-N =∠antenna + ∠gyro ∠rx =∠tx + ∠gy
Por ejemplo, el rumbo del barco es ∠30 °, la posición de la antena con respecto a la proa del barco es ∠0 °, ∠antenna-N es:
∠rx =∠tx + ∠gy ∠30 ° =∠30 ° + ∠0 °
Por ejemplo, el rumbo del barco es ∠30 °, la posición de la antena con respecto a la proa del barco es ∠15 °, ∠antenna-N es:
∠45 ° =∠30 ° + ∠15 °
Suma y resta
Como referencia, mostramos los diagramas de cableado para la resta y la suma de ángulos de eje utilizando TDX (transmisor de diferencial de par) y TDR (receptor de diferencial de par). El TDX tiene una entrada de ángulo de torsión en el eje, una entrada de ángulo eléctrico en las tres conexiones del estator y una salida de ángulo eléctrico en las conexiones de tres rotores.
El TDR tiene entradas de ángulo eléctrico tanto en el estator como en el rotor. La salida del ángulo es un par en el eje del TDR. La diferencia entre un TDX y un TDR es que el TDX es un transmisor de par y el TDR un receptor de par.
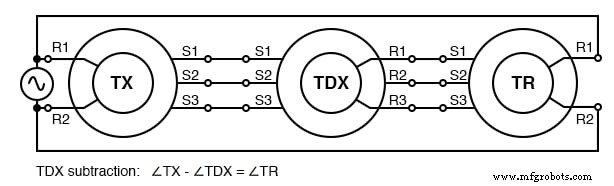
resta TDX
Las entradas de par son TX y TDX. La diferencia angular de salida de par es TR.
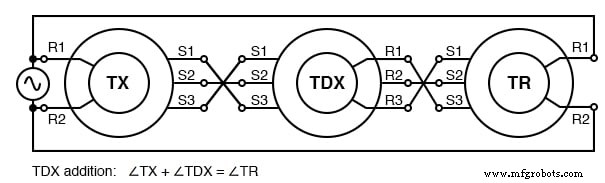
Adición TDX
Las entradas de par son TX y TDX. La suma angular de la salida de par es TR.
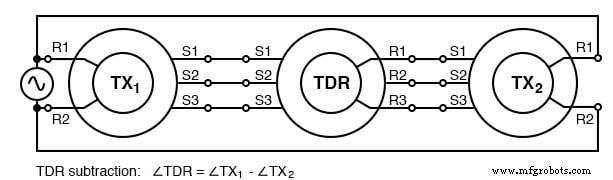
resta de TDR
Las entradas de par son TX 1 y TX 2 . La diferencia angular de salida de par es TDR.
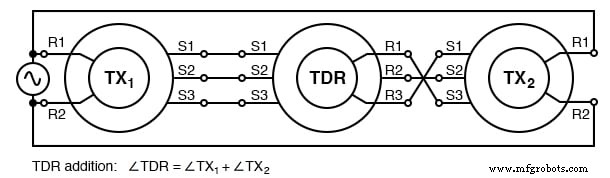
Adición de TDR
Las entradas de par son TX 1 y TX 2 . La suma angular de salida de par es TDR.
Transformador de control
Una variación del transmisor sincronizado es el transformador de control . Tiene tres devanados de estator igualmente espaciados como un TX. Su rotor está enrollado con más vueltas que un transmisor o receptor para hacerlo más sensible a la detección de un nulo cuando es girado, típicamente, por un servo sistema.
La salida del rotor del CT (Transformador de control) es cero cuando está orientado en ángulo recto con el vector del campo magnético del estator. A diferencia de un TX o RX, el CT no transmite ni recibe par. Es simplemente un detector de posición angular sensible.
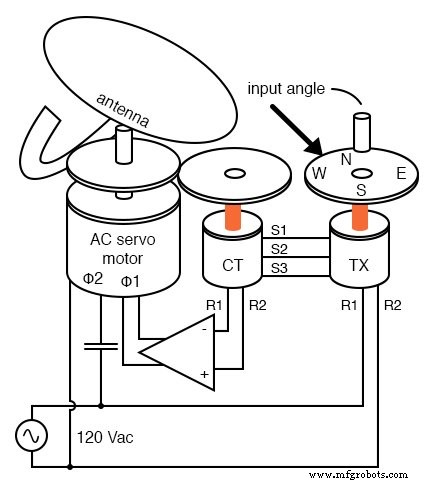
El transformador de control (CT) detecta el servo nulo
En la figura anterior, el eje del TX está colocado en la posición deseada de la antena del radar. El servo sistema hará que el servomotor lleve la antena a la posición ordenada. El CT compara la posición ordenada con la real y le indica al servoamplificador que impulse el motor hasta que se logre el ángulo ordenado.
Servo usa CT para detectar la posición nula de la antena
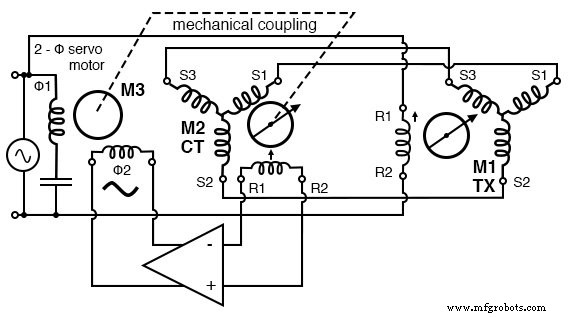
Cuando el rotor del transformador de control detecta un nulo a 90 ° al eje del campo del estator, no hay salida de rotor. Cualquier desplazamiento del rotor produce un voltaje de error de CA proporcional al desplazamiento.
Un servo busca minimizar el error entre una variable ordenada y medida debido a la retroalimentación negativa. El transformador de control compara el ángulo del eje con el ángulo del campo magnético del estator, enviado por el estator TX.
Cuando mide un mínimo o nulo, el servo ha impulsado la antena y el rotor del transformador de control a la posición ordenada. No hay error entre la posición medida y ordenada, no hay salida de CT para amplificar.
El servomotor , un motor de 2 fases, deja de girar. Sin embargo, cualquier error detectado por CT impulsa el amplificador que impulsa el motor hasta que se minimiza el error. Esto corresponde al servo sistema que ha impulsado el CT acoplado a la antena para que coincida con el ángulo ordenado por el TX.
El servomotor puede impulsar un tren de engranajes reductores y ser grande en comparación con los sincronizadores TX y CT. Sin embargo, la baja eficiencia de los servomotores de CA los limita a cargas más pequeñas. También son difíciles de controlar ya que son dispositivos de velocidad constante.
Sin embargo, se pueden controlar hasta cierto punto variando el voltaje en una fase con el voltaje de línea en la otra fase. Las cargas pesadas son impulsadas de manera más eficiente por grandes servomotores de CC.
Las aplicaciones aéreas utilizan componentes de 400 Hz:TX, CT y servomotor. El tamaño y el peso de los componentes magnéticos de CA son inversamente proporcionales a la frecuencia. Por lo tanto, el uso de componentes de 400 Hz para aplicaciones aeronáuticas, como superficies de control móviles, ahorra tamaño y peso.
Solucionador
Un solucionador (figura siguiente) tiene dos devanados de estator colocados a 90 ° entre sí, y un devanado de rotor único impulsado por corriente alterna. Se utiliza un resolutor para la conversión polar a rectangular. Una entrada de ángulo en el eje del rotor produce coordenadas rectangulares senθ y cosθ voltajes proporcionales en los devanados del estator.
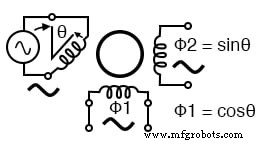
El solucionador convierte el ángulo del eje en seno y coseno del ángulo
Por ejemplo, una caja negra dentro de un radar codifica la distancia a un objetivo como un voltaje proporcional de onda sinusoidal V, con el ángulo de orientación como un ángulo del eje. Convierta a coordenadas X e Y. La onda sinusoidal se alimenta al rotor de un resolver. El eje del ángulo del rodamiento está acoplado al eje del resolver. Las coordenadas (X, Y) están disponibles en las bobinas del estator del resolver:
X =V (cos (∠bearing)) Y =V (sin (∠bearing))
Las coordenadas cartesianas (X, Y) se pueden trazar en una pantalla de mapa. Un TX (transmisor de par) se puede adaptar para el servicio como resolver.

Scott-T convierte 3-φ en 2-φ permitiendo que TX realice la función de resolución
Es posible derivar componentes angulares en cuadratura similares a resolver a partir de un transmisor sincronizado utilizando un Scott-T transformador. Las tres salidas TX, trifásicas, son procesadas por un Scott-T transformador en un par de componentes en cuadratura. También existe una versión lineal del resolutor conocida como inductosyn. La versión rotativa de inductosyn tiene una resolución más fina que un resolutor.
Resumen:motores Selsyn (sincronizados)
- Un sincronizado , también conocido como selsyn , es un transformador rotatorio que se utiliza para transmitir el par del eje.
- Un TX, transmisor de par , acepta una entrada de par en su eje para la transmisión en salidas eléctricas trifásicas.
- Un receptor de torque RX , acepta una representación eléctrica trifásica de una entrada angular para convertirla en una salida de par en su eje. Por lo tanto, TX transmite un par de un eje de entrada a un eje de salida RX remoto.
- Un TDX, transmisor diferencial de par , suma una entrada de ángulo eléctrico con una entrada de ángulo de eje que produce una salida de ángulo eléctrico
- Un TDR, receptor de diferencial de par, suma dos entradas de ángulo eléctrico que producen una salida de ángulo del eje
- Un CT, transformador de control , detecta un nulo cuando el rotor se coloca en ángulo recto con la entrada del ángulo del estator. Un CT es típicamente un componente de un sistema de retroalimentación servo.
- Un solucionador genera una representación en cuadratura sin (θ) y cos (θ) de la entrada del ángulo del eje en lugar de una salida trifásica.
- La salida trifásica de un TX se convierte en una salida de estilo resolutor mediante un transformador Scott-T .
Tecnología Industrial
- Motores síncronos
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Consejo técnico:Motores
- Accionamientos y motores en bancos de pruebas de automoción
- Beneficios de los motores enfriados por líquido
- Escobillas de carbón en motores de CC:usos, fallas comunes y más
- Seguridad de motores eléctricos:diferentes fases y medidas de seguridad
- 7 pasos para garantizar un mejor mantenimiento de los motores eléctricos
- 4 tipos principales de fallas de bobinado en motores eléctricos de CA
- Motores eléctricos de CC y CA:¿cuáles son sus diferencias?