


DDTv3:El robot de combate de nailon y kevlar impreso en 3D
DDTv3:el robot de combate de nailon y kevlar impreso en 3D
No tuve la oportunidad de escribir el informe del evento Bot Blast 2015 a principios de julio de este año, pero si lo hiciera, no tendría mucho que decir. Ni DDT ni Silent Spring lo hicieron muy bien y sumaron un W-L total de 2-4. Además, el marco de DDT estaba terminado y vi esta oportunidad de volver a visitar algunos de los credos de diseño que había estado promocionando durante el año pasado, como el "entretenimiento de las grandes armas" y el "impulso indirecto". Estos conceptos son buenos para el valor de entretenimiento y la confiabilidad a largo plazo, pero no son necesariamente la clave para ganar peleas. Con un poco de apariencia televisiva, tenía un objetivo en mi espalda y muchos constructores adorarían la oportunidad de probarse a sí mismos contra uno de los constructores de robots de la “crema de la cosecha” como lo describieron los fundadores de Battlebots. No me importa esto ni un poco, pero si este es el caso, será mejor que esté a la altura de las expectativas. Entonces, comenzando con DDT, evolucionaré a cada robot de mi flota.
Un nuevo diseño
Recientemente, Charles compró una impresora 3D Mark One de la empresa Mark Forged. Esta impresora es única porque tiene la capacidad de incrustar hebras CONTINUAS de fibra (fibra de vidrio, kevlar, fibra de carbono) dentro de cada capa de su impresión. Aunque no puede colocar fibra en el eje de construcción vertical, esta es una mejora monumental en la resistencia a la tracción.
Además, imprime nailon como material base, que es mecánicamente superior al ABS en nuestra aplicación. Para demostrar aún más las capacidades y aplicaciones de su tecnología, he elegido imprimir DDT como un cuerpo de nailon-kevlar.
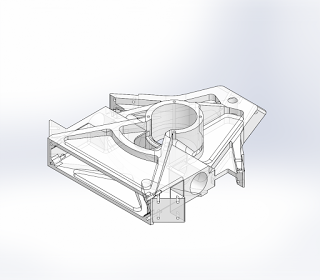
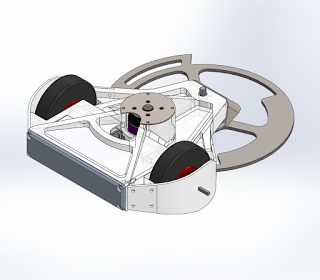
Diseñar para un marco unibody es un poco desafiante porque muchos detalles sobre las piezas, sus conexiones y su orden de ensamblaje deben conocerse con anticipación. CAD se convirtió en una herramienta invaluable en este proceso; cada parte se modeló con un detalle insoportable y se desarrolló un pedido de ensamblaje detallado para el compartimiento de componentes trasero.
Me doy cuenta de que este diseño no es óptimo para la impresión 3D y quizás pueda explicar en otro post si la gente está interesada. El razonamiento para el diseño de las cerchas fueron complementos para endurecer las características largas o delgadas. Un mejor diseño habría hecho que el robot tuviera más bloques, pero en mi opinión habría sido estéticamente aburrido.
DDT mantuvo su forma única y su marca registrada "hoja enorme", pero con algunas modificaciones. Primero, el tamaño de la hoja se redujo a 6 ″ (en lugar de 6,5 ″). Esta decisión se tomó para liberar algo de peso que se asignará a otros lugares, específicamente las nervaduras de las palas. Tenía dos cuchillas hechas para DDT v2 y ambas estaban horriblemente dobladas después de un año de servicio. El diseño de hoja más nuevo reforzó las secciones en aproximadamente 1,5 veces y aún era más liviano que las hojas antiguas.

En segundo lugar, se agregó más armadura al cuerpo. Esta decisión se tomó después de la cantidad de golpes a las poleas y ruedas. Las partes del marco se engrosarían en general y se incluiría una armadura lateral.
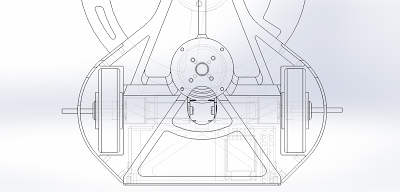
En tercer lugar, la transmisión indirecta se abandonó a favor de la transmisión directa a chispas plateadas 22:1 con ruedas de espuma acolchada. Los pequeños micro motorreductores de latón demostraron ser poco fiables y las relaciones que estaba usando eran de lejos a suaves para ser maniobrables. El DDT original usaba aproximadamente cajas de cambios de 20:1 y tenía una movilidad superior.
Finalmente, se cambió el material de la cuchilla. Esta vez quise usar materiales preduros porque mis intentos de endurecer fueron insatisfactorios. Las hojas estándar de 6 ″ fueron chorro de agua de acero para resortes 1075/74 duro 60C. Se hizo un juego alternativo de cuchillas para tipos específicos de oponentes. Estos también estaban hechos de diferentes materiales y tenían diferentes geometrías.

Fabricación
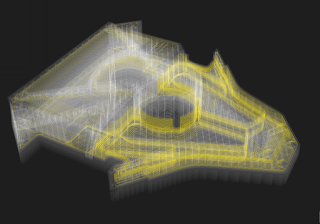
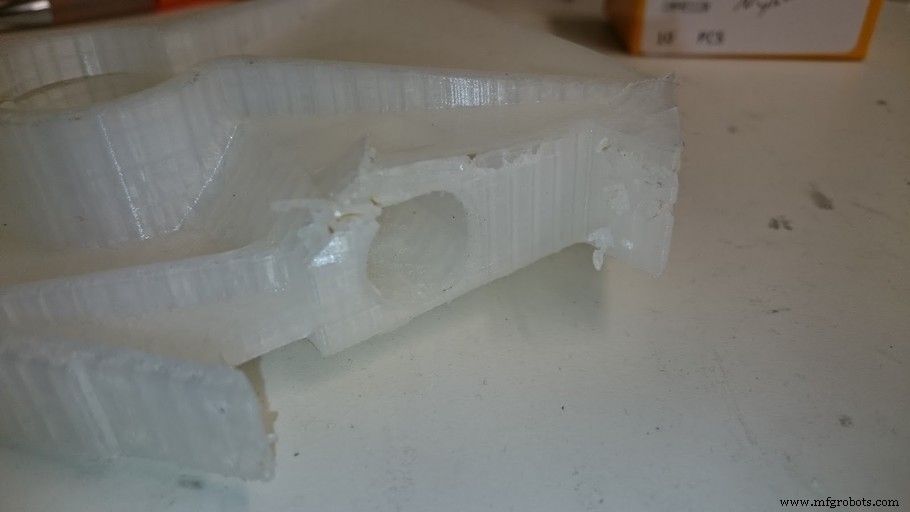
¡El marco tardó casi 36 horas en imprimirse! La impresora actualmente es ciertamente lenta, especialmente con la adición de fibra. Si bien el marco ciertamente podría haber usado más fibra, decidí optimizar para obtener más "altura" de fibra que profundidad, por lo que todas las capas tenían fibra, pero solo las capas seleccionadas tenían capas completas.

El marco necesitaba una limpieza para permitir el ajuste adecuado de las piezas. Todas las características socavadas se terminaron con una broca de lijado de herramienta giratoria para limpiar las áreas donde se colocaron las estructuras de soporte. Esto fue fundamental para la colocación de los motores de accionamiento, los orificios de los tornillos y otros componentes.

Los componentes electrónicos críticos se empaquetaron en un pequeño cubo que diseñé usando mis habilidades de nivel experto en tetris. Este pequeño cubo contiene un receptor Orange RX, un Turnigy Plush 10 ESC para el arma y dos controladores de motor Vex 29 para cada motor de chispa.

El cubo de electrónica está diseñado para encajar en el marco de esa manera.

El motor se recicló de v2 y se cableó el robot. No se usó ningún interruptor de encendido dedicado ya que últimamente tuve mala suerte con los interruptores Fingertech y me sentía escéptico; en lugar de esto, elegí usar una conexión directa a la batería.
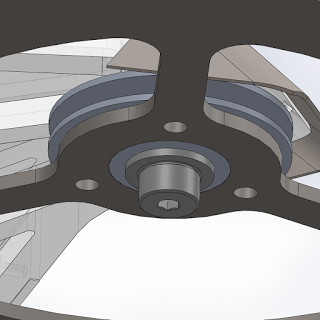
También se modificó la interfaz de la cuchilla y la polea. En lugar de colocar el cojinete directamente dentro del orificio de la hoja como se hizo anteriormente, ambos cojinetes se colocarían en el cubo y la hoja se atornillaría a la polea. Una característica redonda en la polea emparejaría la hoja concéntricamente con la polea. Este método es mejor porque permite intercambiar las cuchillas sin desmontar todo el conjunto del eje, reduce la desalineación porque la inclinación ya no depende de la alineación de la cuchilla y la polea y reduce el impacto de los cojinetes al colocar un medio entre el diámetro exterior del rodamiento y la hoja.
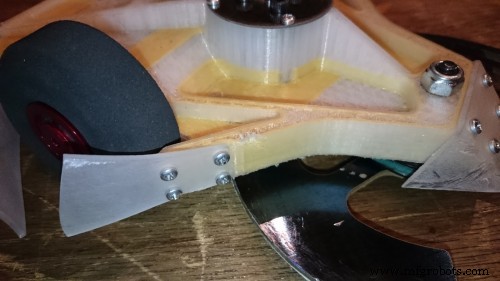
Por último, la armadura lateral se hizo para ajustarse a los lados. Estos se cortaron de policarbonato 0.0625 que es resistente pero flexible. Sin embargo, con esta longitud y grosor cortos, los lados eran difíciles de poner y estaban muy precargados. No tengo grandes esperanzas en estos; con anticipación, hice varias copias.


¡El peso final fue de 15,5 oz! Un peso muy cómodo y algo de margen de maniobra para mejorar.
Rendimiento preliminar
El DDT tuvo la oportunidad de destrozar varios artículos. Sin embargo, ninguno de ellos pesaba ni una libra. Aún así, estas pruebas demostraron daños notables en UHMW, aluminio e incluso otras piezas de nailon impresas en 3D. ¡No podría pensar en una mejor manera de enviar el marco v2 de forma permanente!

Microbatallas de Dragon Con 2015
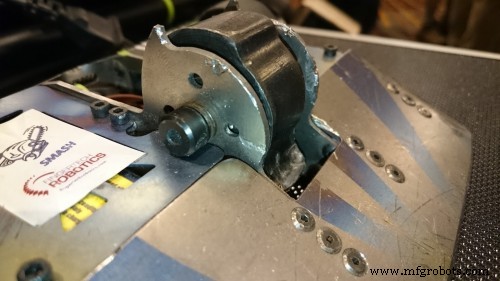
El debut de DDT v3 fue en Dragon Con 2015, donde tuvo cuatro partidos y fue 3 victorias, 1 derrota. Estoy muy contento con su desempeño y la resistencia del marco impreso. Casi esperaba que el orificio del eje del arma se abriera después de tantos golpes (incluidos los golpes en la pared de la arena), pero sigue siendo tan cierto como cuando se hizo por primera vez, probablemente debido en parte al pesado relleno de kevlar alrededor de las dimensiones críticas. Las luchas de DDT están incluidas a continuación. Tuve mucha suerte de no volar fuera del pozo en varias ocasiones, pero desafortunadamente mi suerte se acabó cuando un golpe sólido en Algos envió DDT volando al pozo.
El DDT recibió algunos daños de Green Reaper cuando trepó por encima de la hoja y comenzó a masticar el marco. Me sorprendió ver que no se había hecho mucho daño, pero solo porque mi espada le impedía empujar hacia el marco, de lo contrario seguramente se habría hecho más daño; parte de la fibra está expuesta, lo que significa que obtuvo aproximadamente 0,6 mm de profundidad. Ambos guardabarros explotaron contra Algos, pero pude dejar una buena marca en su Ti de 0.0625 de grosor antes de volar.


Quiero encontrar más oportunidades para que el DDT desafíe a otras hormigas. Hay dos competiciones que se acercan en octubre; Haré todo lo posible para llevar DDT allí. ¡Estén atentos!
Impresión 3d
- El futuro de la robótica
- El pentodo
- Lápida
- Traje de baño
- Espada
- Arquímedes:El búho robot con IA
- El caso de una caja de cambios ruidosa
- Las prótesis impresas en 3D son el futuro
- Seguimiento de la historia de los materiales poliméricos:Parte 11
- Robot "artístico" en NPE
- La historia de la robótica en la fabricación