


El futuro de la robótica
El futuro de la robótica está distribuido. Cualquier robot complejo es un conjunto distribuido de módulos y sistemas, algunos autónomos, otros semiautónomos y otros controlados por humanos, todos operando estrechamente juntos para formar un único sistema cohesivo de partes interoperativas. En la telerobótica buscamos permitir la teleoperación de un robot y darle al operador una sensación humana de estar donde se está desplegando el robot, proporcionando video y fuerzas de interacción a los operadores humanos.
Para la ESA, esto significa en el espacio o en la superficie de un planeta hostil. ¡El operador humano puede estar en una estación espacial o incluso en la Tierra!
Para hacer esto, habilitamos la telepresencia a través de una combinación de retroalimentación de fuerza háptica para el operador combinada con video de realidad aumentada.
Proporcionar información visual y táctil al usuario permite la telepresencia. Cuanto más realista e informativa sea la retroalimentación, mayor será la percepción de telepresencia del operador, lo que conduce a una mejor operación remota del robot.
El desafío crítico para la ESA de la teleoperación espacial es el enlace de comunicación. Hay muchos bucles de control en tiempo real en los robots, pero el que existe entre el humano y el robot remoto en un sistema de teleoperación es el más problemático. Varios lazos de control se ejecutan en un enlace de red de conmutación de paquetes que exhibe los peores comportamientos de comunicación. Puede desconectarse en cualquier momento, la latencia a menudo se puede medir en segundos y variar enormemente, además de que la pérdida de paquetes es algo habitual; esto es tan cierto para la comunicación a través de Internet como a través del espacio. Sin embargo, tenemos que enviar todo el video a través de este enlace, el tiempo correlacionado con el estado de control del robot y los comandos de control en ambos extremos. Esto significa que el estado del enlace debe convertirse en una parte integral del bucle de control, con suficiente información disponible en ambos extremos para que el operador reaccione adecuadamente y para que el robot remoto se mantenga en un estado seguro y estable. El estado del enlace debe convertirse en una parte integral del estado del sistema.
El equipo de desarrollo de la ESA está formado por ingenieros mecatrónicos, especialistas en visión por computadora, teóricos de sistemas de control y algunos ingenieros de software. Tuvimos claro en una etapa temprana que necesitábamos buscar un método común para discutir las necesidades e interfaces del sistema, especialmente cuando se nos pidió que entregaran sistemas distribuidos complejos que involucraran múltiples computadoras, diferentes plataformas de hardware y software para operar; nos decidimos por los datos. Pensamos en los datos como un medio para comprender el estado del sistema, como un medio para representar fotogramas de video y como un medio para representar la teoría de control. Por lo tanto, tenía sentido enfocar nuestro entorno de desarrollo y los datos de desarrollo del sistema de forma centrada. Junto con la necesidad crítica de comprender el estado del enlace como parte de la teleoperación, fuimos conducidos inexorablemente a evaluar el DDS (Servicio de distribución de datos). La NASA ya era un gran usuario de DDS en sus sistemas de comunicación espacial, pero ¿podría DDS también permitir la teleoperación a través de un enlace tan desafiado, permitiendo el control en tiempo real sobre lo que es de hecho la más desafiante de las conexiones? Este es un nuevo territorio científico inexplorado, y por eso es aún más emocionante. Las indicaciones iniciales son extremadamente alentadoras.
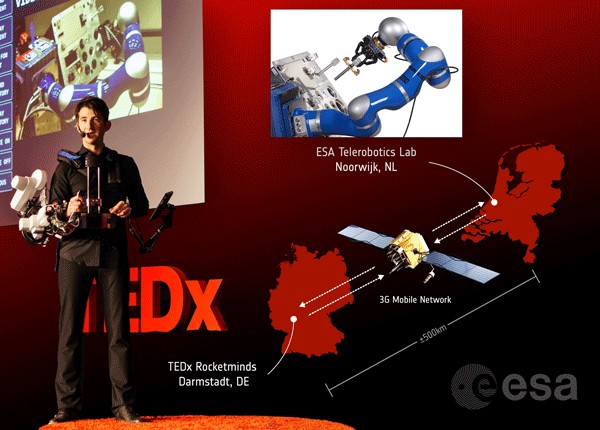
En esta demostración en vivo en TEDx RheinMain RocketMinds, mayo de 2014, utilicé nuestro prototipo de brazo exoesqueleto EXO-1 para controlar de forma remota un brazo robótico que estaba ubicado físicamente en nuestra ESA Telerobotics &Laboratorio de háptica a más de 500 km de distancia. Mi tarea consistía en recoger un pasador de metal y colocarlo en un agujero con una tolerancia de espacio de menos de 0,5 mm. ¡Toda la demostración se ejecutó a través de una conexión WAN de teléfono 2G basada en Internet porque la conexión 3G planificada no estaba disponible inesperadamente! En la habitación cerrada, repleta de personas con teléfonos en los bolsillos, el ancho de banda estaba muy limitado y, de hecho, exhibía el tipo de conexión que se experimenta en el espacio, o en realidad mucho peor. Realmente no puede ser peor que eso, la teleoperación a través de un enlace que exhibió retrasos en el rango de 15 segundos con una pérdida significativa de datos. Aún así, DDS corriendo sobre el enlace 2G logró manejar toda la comunicación para la retroalimentación háptica, el bucle de control del brazo del robot y el video del brazo del robot en el laboratorio (transmitido a una tableta en mi brazo y clonado localmente para mostrarlo en el pantalla principal de TEDx).
Puede que aún no esté en el espacio, pero el control telerobótico de precisión a grandes distancias y los enlaces de datos desafiantes con visión y retroalimentación háptica están literalmente a nuestro alcance y lo hemos demostrado a una amplia audiencia .
ACTUALIZAR :El Experimento Haptics-1 fue realizado a bordo de la Estación Espacial Internacional por el astronauta de la NASA Barry Wilmore. Se realizó una primera prueba previa el 30 de diciembre de 2014. Haptics-1 es el primer experimento de retroalimentación de fuerza robótico en el espacio. ¡Felicidades! leer más
¡Es la primera vez que se usa la retroalimentación háptica en el espacio! ¡Hoy @ Space_Station # haptics-1 se está llevando a cabo con éxito! pic.twitter.com/30zD5GzGqs
- ESATelerobotics (@ESATelerobotics) 30 de diciembre de 2014
Si tiene una historia sobre el uso de Connext DDS que le gustaría compartir, envíenos un correo electrónico a blogadmin@rti.com.
Tecnología de Internet de las cosas
- El futuro de la televisión en vivo
- El futuro es… Industria 4.0
- El futuro es… Colaboración
- Diseñando el futuro con robótica
- Edge computing:la arquitectura del futuro
- Visualizando el futuro del mantenimiento de la planta
- La robótica y el futuro de la producción y el trabajo
- El futuro de los centros de datos
- El futuro de la tecnología logística:¿un siglo chino?
- La historia de la robótica en la fabricación
- AutoStore:preparando el futuro del almacenamiento autónomo