


Robot Drilling 101:Cómo implementar un sistema de perforación robótica
Está buscando implementar un sistema de perforación robótica en sus instalaciones. ¿Qué necesitas saber para empezar?
Es posible que no esté seguro de si la perforación robótica es realmente adecuada para su tarea. ¿Los robots tienen el rendimiento suficiente para una perforación precisa?
Hay varios beneficios al elegir la perforación robótica en lugar de las alternativas, que incluyen más flexibilidad, menor tiempo de trabajo manual y mejor eficiencia. Pero, para obtener estos beneficios, debe asegurarse de que está implementando el robot de la manera correcta.
Este artículo proporciona una guía rápida para comenzar con la perforación robótica sin cometer los errores más comunes.
¿Qué es la perforación robótica?
La perforación robótica es un tipo de operación de mecanizado automatizado en la que una herramienta de perforación se fija al extremo de un robot industrial. A diferencia de las máquinas perforadoras de control numérico por computadora (CNC) convencionales, los robots tienen un espacio de trabajo más grande y pueden manejar formas más complejas.
Uno de los principales beneficios de usar sistemas de perforación robótica es su flexibilidad. Con el taladrado CNC convencional, generalmente está restringido a taladrar en uno o quizás dos planos. Sin embargo, con los robots, puede perforar en casi cualquier orientación que desee.
Esta flexibilidad es muy clara cuando observa proyectos como la obra de arte producida por los usuarios de RoboDK Neoset Designs para el artista Robert Longo hace unos años. La obra de arte consistía en una enorme esfera de metal perforada con miles de agujeros y colocada a intervalos regulares en la superficie.
Solo podría lograr este tipo de proyecto con perforación robótica. La perforación manual requeriría demasiado trabajo y la precisión sería inconsistente. Otras formas de automatización de perforación simplemente no podrían perforar desde tantas orientaciones diferentes.
Incluso si sus proyectos de perforación son más modestos, esta flexibilidad puede ser un activo valioso.
¿Realmente funciona la perforación robótica? La cuestión de la rigidez
Una preocupación común cuando las empresas analizan por primera vez el mecanizado robótico es que no habrá suficiente rigidez.
Las máquinas CNC convencionales tienen estructuras mecánicas extremadamente rígidas. La rigidez de una máquina CNC suele ser superior a 50 Newton por micrómetro. Esto les permite alcanzar una precisión muy alta incluso al mecanizar materiales duros.

De hecho, los robots tienen una rigidez menor que las máquinas CNC convencionales. Los brazos de los robots industriales a menudo tienen una rigidez de solo 1 Newton por micrómetro. Esto significa que pueden soportar 50 veces menos fuerza que las máquinas convencionales.
¿Qué significa esto en la práctica?
Con fuerzas altas y materiales duros, la herramienta de perforación de un robot se desviará más que la de una máquina CNC. Esto corresponde a una menor precisión en tales casos.
¿Es la Baja Rigidez un Problema? Depende del Material
Sin embargo, la menor rigidez de los robots en comparación con las máquinas CNC no es necesariamente algo malo.
Incluso la máquina CNC más rígida del mundo se desviará hasta cierto punto. La pregunta es cuánta desviación es aceptable.
Cuando elige un sistema de perforación robótica, debe prestar mucha atención a las propiedades del material. Con la combinación correcta de robot y material de la pieza de trabajo, puede asegurarse de que su sistema de perforación robótica tenga la rigidez adecuada para la tarea elegida.
¿Cuál es el mejor brazo robótico para perforar?
¿Qué brazo robótico industrial elegir para taladrar?
El mejor robot para usted será el que cumpla todos sus criterios de rendimiento sin salirse de su presupuesto.
Muchos modelos de robots son adecuados para taladrar algunos materiales. Sin embargo, solo algunos serán adecuados para el material con el que está trabajando y los requisitos de rendimiento de su tarea.
Los factores que afectan la perforación robótica incluyen:
- La rigidez del robot, como explicamos anteriormente.
- Cómo maneja el robot las vibraciones.
- Las opciones de efectores finales para el mecanizado robótico.
- Opciones de programación para el robot.
La forma más rápida y sencilla de evaluar todos estos factores es preguntar a su distribuidor o integrador de robots. Estarán más familiarizados con su catálogo de modelos de robots y sabrán cuál es el adecuado para sus necesidades.
Las propiedades como la rigidez no suelen aparecer en las hojas de datos de los robots industriales. Existen varios métodos analíticos que puede usar para calcular la rigidez de un brazo robótico, pero generalmente es mejor preguntarle al fabricante.
Cómo implementar un sistema de perforación robótica
El proceso de implementación para la perforación robótica es muy similar a otros proyectos de mecanizado robótico.
Debe comenzar por evaluar las necesidades de su tarea y comparar los distintos robots del mercado. Puede usar nuestra Biblioteca de robots para limitar los robots con características particulares (como la repetibilidad y la carga útil), pero deberá solicitar al fabricante detalles sobre la rigidez.
Cuando se haya decidido por su robot, la siguiente opción es el efector final de su robot. Para ello, puede utilizar un husillo de mecanizado o de taladrado.
Finalmente, deberá programar el robot...
Programando su maquina perforadora robot
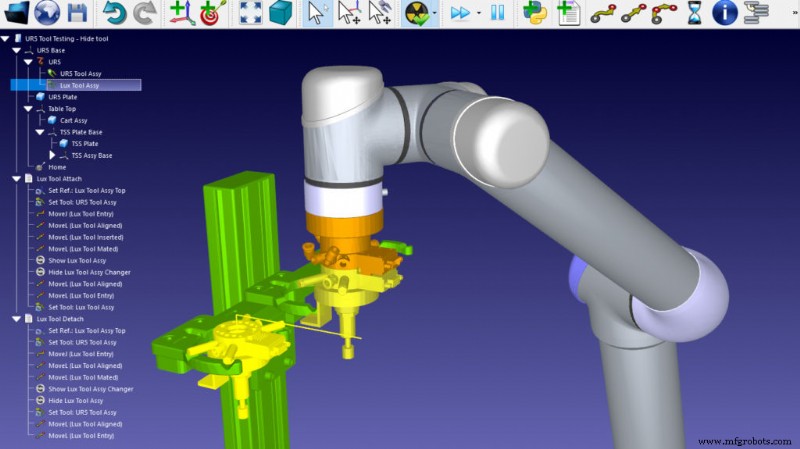
Un desafío común al programar un sistema de perforación robótica es la gran cantidad de puntos en una operación de perforación.
A diferencia de la soldadura, no puede simplemente indicarle al robot que se mueva en línea recta. Debe dirigir el robot a cada orificio de perforación en la superficie de la pieza de trabajo. Esto puede hacer que la programación sea muy ardua.
Puede acelerar significativamente su programación utilizando una herramienta de programación que incorpore la programación de puntos.
Por ejemplo, el asistente PointFollow de RoboDK le permite cargar un conjunto de puntos de perforación como un archivo de texto simple. También tiene la capacidad de convertir automáticamente un camino curvo o recto en un conjunto de agujeros espaciados regularmente para taladrar.
Puede averiguar cómo programar programas de perforación con esta característica en nuestra página de documentación.
¿Qué aspecto de la perforación robótica es el más desafiante para usted? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- Cómo los robots de pulverización mejoran la coherencia
- Cómo los robots de pintura reducen el retrabajo
- ¿Cómo alcanza un robot la autonomía total?
- Cómo implementar aplicaciones Java EE en Azure
- Cómo implementar DevOps en la nube
- Cómo hacer una plataforma de robot Arduino + Raspberry Pi
- Documento técnico:Cómo encontrar el potencial de su robot
- Robot Warehouse System:qué es y cómo se usa
- Guía definitiva:Cómo elegir un robot SCARA adecuado
- Robot Machine Tending:qué es y cómo funciona
- Cómo reducir el tiempo de capacitación para la soldadura robótica