


¿Qué es un editor de posprocesador y cómo se usa?
Está utilizando un robot simulado o una máquina CNC... pero no funciona correctamente. ¿Podría ser hora de usar un editor de posprocesador?
¿Qué hace un posprocesador y por qué querrías editar uno?
Si está utilizando la programación fuera de línea, es muy probable que haya interactuado con un posprocesador. Tal vez esté utilizando RoboDK para programar un robot para mecanizado robótico u otra aplicación robótica. O tal vez esté utilizando un sistema CAD/CAM compatible con sus máquinas CNC.
Incluso si no lo sabe, está utilizando un posprocesador cada vez que utiliza un sistema de este tipo para programar sus máquinas físicas.
Un posprocesador es el puente entre el entorno simulado y su máquina física. Convierte las instrucciones simuladas en código que el robot puede usar.
Pero, ¿qué pasa si quieres cambiar cómo el programa genera este código? Ahí es donde entra en juego un editor de posprocesador...
¿Por qué necesitaría editar un posprocesador?
La mayoría de las personas nunca necesitarán editar su posprocesador.
Si está utilizando RoboDK, por ejemplo, simplemente descargue su modelo de robot de nuestra extensa Biblioteca de robots. Ya hemos vinculado cada modelo a uno de los más de 80 posprocesadores dentro de RoboDK. Siempre que envíe su programa simulado al robot físico, el posprocesador convertirá el código por usted "debajo del capó".
Sin embargo, hay algunas situaciones en las que necesitará editar su posprocesador.
Cada fabricante de robots utiliza su propio lenguaje de programación patentado, que se ejecuta en su propio controlador de robot. Cada controlador tiene una gama de diferentes opciones de configuración y características. El posprocesador es donde puede establecer todas estas opciones de configuración personalizadas.

Por ejemplo, los controladores de robot Techman incluyen una opción de seguridad para pedirle al usuario una contraseña antes de que pueda reprogramar el robot. El posprocesador es donde encontrará las opciones para habilitar, deshabilitar y establecer esta contraseña. No todos los robots tienen esta opción.
¿Qué es un editor de post-procesador?
Un editor de postprocesador es un software dedicado que se utiliza para editar archivos de postprocesador de robot o CNC. Esto hace que la edición del postprocesador sea más intuitiva que con un editor de texto estándar, que es la única opción para muchos sistemas de programación.
Un ejemplo de dicho software es el editor de posprocesador que se incluye en RoboDK.
Los postprocesadores de RoboDK están escritos en el lenguaje de programación Python. Para cada uno de los posprocesadores admitidos, existe una biblioteca compilada (un archivo PYC) y un script de Python editable que contiene todas las propiedades de configuración.
Estos archivos de configuración se pueden editar con cualquier editor de texto estándar si desea un control total de la configuración. Sin embargo, RoboDK también ofrece un editor de posprocesador más intuitivo. Esto le permite cambiar los parámetros de su robot elegido sin tener que involucrarse en el código en absoluto.
Cómo editar un postprocesador de forma sencilla
En RoboDK, la forma más fácil de editar su posprocesador es usar nuestro editor de posprocesador. Proporciona información sobre cuándo es más probable que utilice cada uno de los parámetros y valores recomendados. Con esta herramienta, cubrirá la gran mayoría de los casos de uso de su robot.
Cada posprocesador contiene una lista de propiedades de configuración. Estos variarán según el fabricante de su robot.
Algunos postprocesadores incluyen muy pocas propiedades. Por ejemplo, el posprocesador de los robots Mecademic solo incluye una propiedad (el tipo de archivo del archivo de programa).
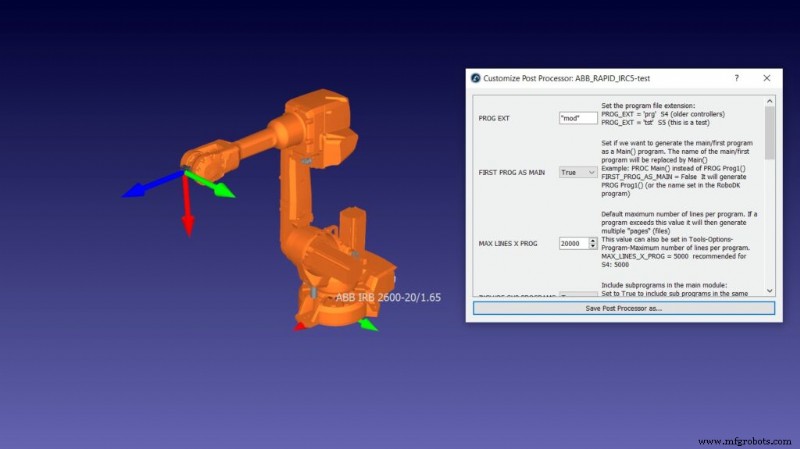
Otros posprocesadores incluyen muchas propiedades. Por ejemplo, el posprocesador ABB_RAPID_IRC5 para robots ABB tiene 16 propiedades, que van desde la velocidad predeterminada del robot hasta indicadores de configuración para tocadiscos externos.
Independientemente del robot que esté utilizando, la forma más sencilla de editar su posprocesador es cargarlo en el editor RoboDK. Podrá ver todas las propiedades de configuración disponibles y decidir cuáles son las más adecuadas para su aplicación.
La guía de edición simple del postprocesador
Cuando abra el editor de posprocesador, aparecerá una lista de las propiedades disponibles.
¿Cómo decide qué propiedades ajustar y qué valores establecer?
Usemos un ejemplo específico para mostrar el proceso... Veremos el posprocesador AUBO para la gama de robots colaborativos de la empresa.
El posprocesador AUBO contiene las siguientes propiedades:
- PROG EXT:esta es la extensión del programa y se incluye en muchos posprocesadores. Especifica el tipo de archivo que generará RoboDK.
- SPEED MS y SPEED RAD:especifica la velocidad en metros por segundo y radianes para movimientos circulares.
- ACCEL MSS y ACCEL RADSS:especifica la aceleración del robot en metros por segundo al cuadrado o radianes por segundo al cuadrado para aceleraciones circulares.
Como puede ver, las propiedades a menudo son claras solo por sus convenciones de nomenclatura. Sin embargo, cuando el propósito de una propiedad no es inmediatamente obvio, generalmente hay una descripción en el editor y, a menudo, también valores recomendados.
Si aún no puede determinar el propósito de una propiedad en particular, puede encontrar información en el manual de su robot o puede hacer una pregunta en el foro de RoboDK.
Dónde encontrar el nuevo editor de postprocesador de RoboDK
¡Comenzó a editar el posprocesador de su robot con el editor RoboDK!
Puede encontrar información sobre cómo activar y usar el editor en nuestra página de documentación.
¿Preguntas? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK. Además, vea nuestra extensa colección de videos y suscríbase al canal de YouTube de RoboDK
Robot industrial
- Decodificación del software de mantenimiento preventivo:qué hace y cómo usarlo
- Puesta en servicio remota:por qué la necesita y cómo utilizarla
- Rendimiento total efectivo del equipo:qué es TEEP y cómo puede usarlo para mejorar la programación
- Curva P-F:Qué es y cómo usarla en mantenimiento
- ¿Qué es una plataforma de IoT? (Y cómo elegir uno)
- ¿Qué es una caída de presión y cómo se previene?
- ¿Qué es un compactador y cómo elijo el adecuado?
- Embragues industriales:¿Qué son y cómo se usan?
- Microcontrolador PIC18:qué es y cómo usarlo
- ¿Qué es una máquina Ironworker y por qué necesita una?
- ¿Qué es un designador de referencia y cómo lo usamos en ensamblaje?