


Brazo robótico con controlador
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
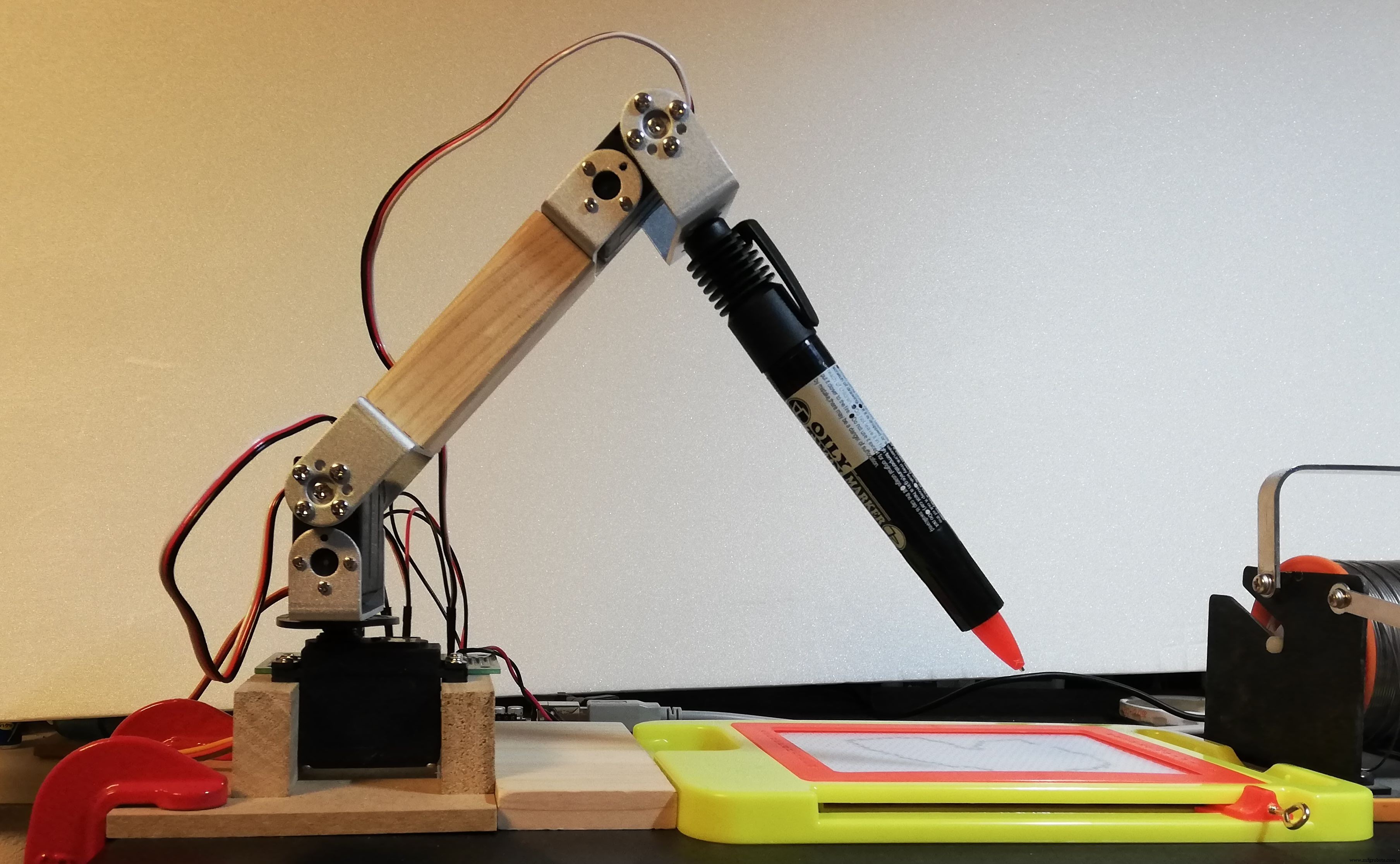
Hice el brazo obot y su controlador.
Constitución
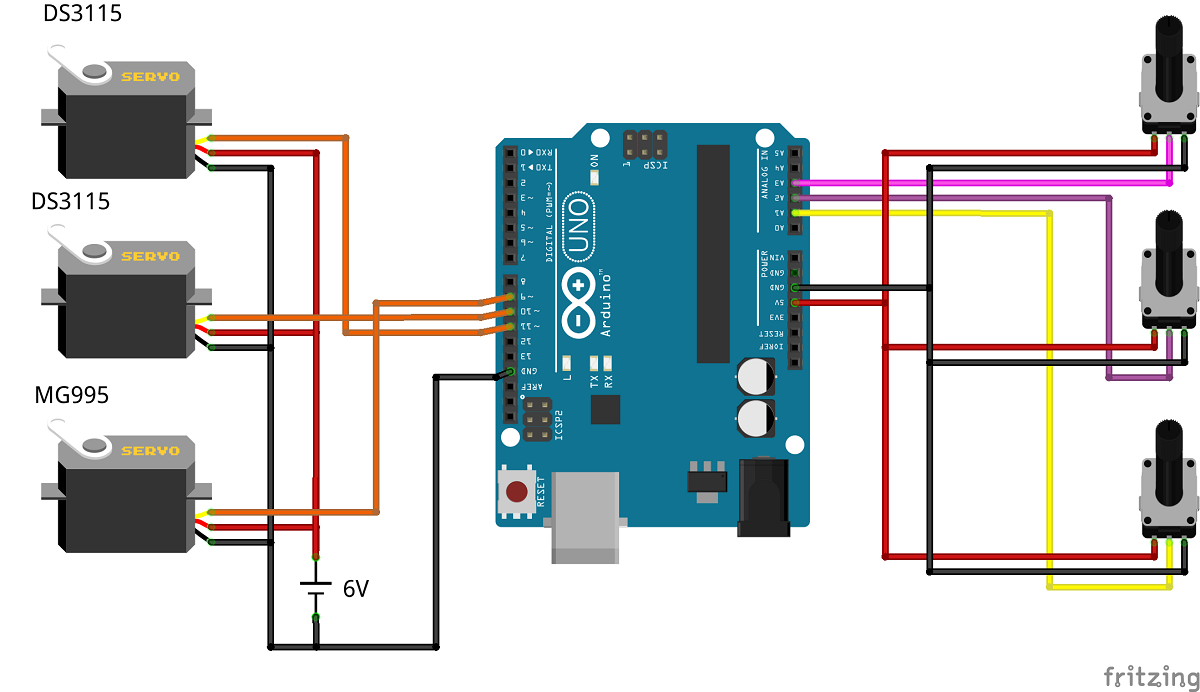
El brazo del robot utiliza tres servos PWM convencionales y cada ángulo está controlado por una resistencia variable. El potenciómetro giratorio utilizó una curva B de 10 k ohmios.
Producción de brazos robóticos
Se utilizaron dos servomotores DS3115 en la dirección vertical y el servomotor MG995 en la dirección de giro.
Producción de controladores
Hice una caja de controlador con una impresora 3D.
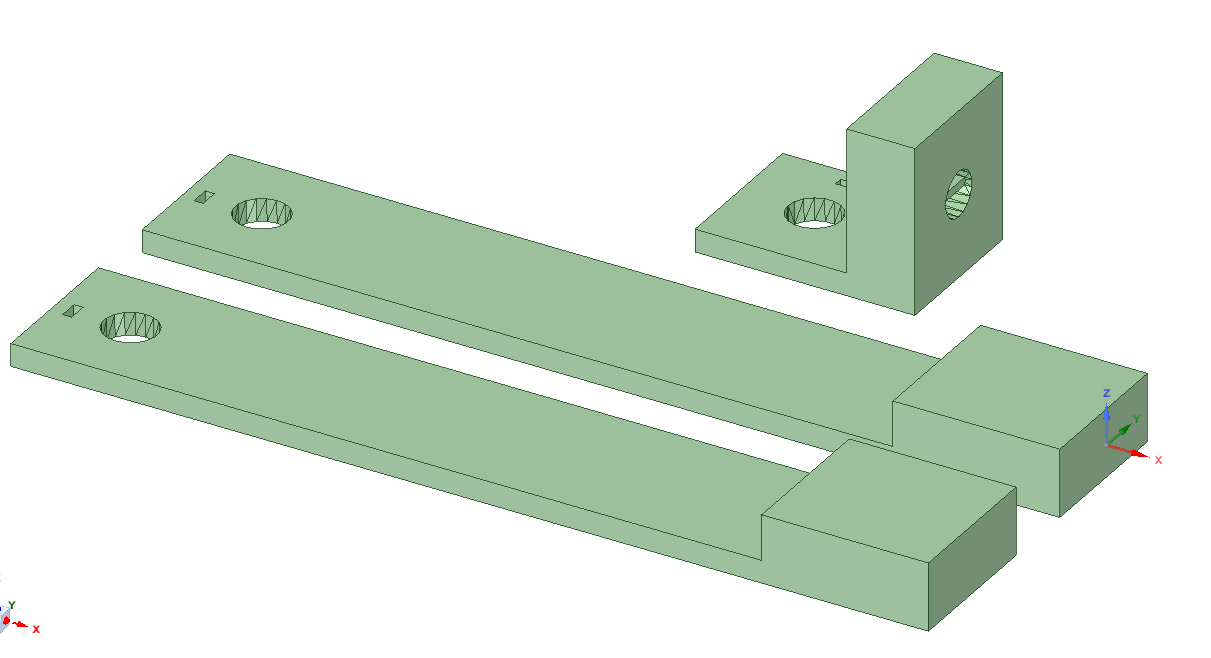
Se proporcionan un orificio y un orificio de posicionamiento para atornillar a través de la perilla del potenciómetro giratorio, y una abolladura para insertar la perilla.

¡Ensamble las piezas fabricadas y tres potenciómetros giratorios para completar!
¡El potenciómetro giratorio ahora se ha colocado en la misma dirección que el eje de rotación del servomotor del brazo del robot!
Código Arduino
Este código simple simplemente lee el valor del potenciómetro giratorio con un pin analógico, lo convierte a un ángulo y lo ingresa al servo correspondiente.
#include
Servo myservo1, myservo2, myservo3;
float th1 =90.0, th2 =90.0, th3 =90.0;
float val1, val2, val3;
void setup () {
Serial.begin (9600);
myservo1.attach (9, 500, 2420); // MG995
myservo2.attach (10, 820, 2140); // DS3115
myservo3.attach (11, 820, 2140); // DS3115
set_servo ();
}
bucle vacío () {
val1 =analogRead (A1);
val2 =analogRead (A2);
val3 =analogRead (A3);
th1 =map (val1, 170.0, 880.0, 0.0, 180.0);
if (th1> =180.0) {
th1 =180.0;
} else if (th1 <=0.0) {
th1 =0.0;
}
th2 =map (val2, 150.0, 860.0, 0.0, 180.0);
if (th2> =180.0) {
th2 =180.0;
} else if (th2 <=0.0) {
th2 =0.0;
}
th3 =mapa (val3, 860.0, 160.0, 0.0, 180.0);
if (th3> =180.0) {
th3 =180.0;
} más si (th3 <=45.0) {
th3 =45.0;
}
set_servo ();
}
void set_servo ( ) {
myservo1.write (th1);
myservo2.write (th2);
myservo3.write (th3);
}
Operación
¡Complete conectando el potenciómetro giratorio y conectándolo a Arduino!
Piezas y carcasas personalizadas
Proceso de manufactura
- Un robot móvil con evitación de obstáculos basada en la visión
- Robot con video controlado por web Raspberry Pi
- Robot Pi simple
- Robot SCARA de doble brazo
- Robot desinfectante con luces ultravioleta
- Unopad - Controlador MIDI Arduino con Ableton
- Brazo robótico MeArm - Su robot - V1.0
- Obstáculos que evitan el robot con servomotor
- Centro de torneado equipado con brazo robótico
- Robot combina brazo robótico colaborativo con plataforma móvil
- El servomovimiento mejora las operaciones de los robots