


SG 90 Servos:cómo controlar estos motores de tamaño mini usando Arduino
Todos estamos fascinados con la mecánica detrás de los vehículos RC. Esto se debe a lo fácil que es cambiar la marcha, la velocidad y la aceleración. Lo que quizás no sepa es que un componente principal es un micro servo. Sin embargo, solo unos pocos dispositivos pueden controlar objetos con tanta precisión como los servos SG 90.
Sin embargo, estos dispositivos de hardware no funcionan de forma independiente. A menudo, necesita un microcontrolador como Arduino, Raspberry Pi, etc. A medida que avanzamos, aprenderá sobre el servo SG90 y cómo usarlo.
¿Qué son los servos SG 90?
Los servos SG 90 son motores livianos que giran 90 grados en todas las direcciones. Además, la potencia de salida es alta y funciona como servos estándar, aunque más pequeños.
Configuración del cableado del servomotor
| Número de cable | Nombre/Color del cable | Descripción |
| 1 | TIERRA/Marrón | Este cable marrón conecta el micro servo a tierra. |
| 2 | Vcc/Rojo | El +5V aquí es el pin de alimentación que alimenta el motor. |
| 3 | PWM/Naranja | Este cable naranja lleva la señal PWM para impulsar el micro servo. |

(Servomotor mostrando los tres cables)
Características del SG-90
- El peso medio del SG90 es de 9 gramos.
- Las dimensiones del dispositivo son 31 x 11,8 x 22,2 mm.
- Tiene un par de parada de 1,8 kgf.cm.
- Además, tiene un voltaje de funcionamiento nominal de 4,8 V.
- Además, la velocidad de funcionamiento es de 0,1 s/60 grados.
- Tiene un ancho de banda muerta de 10 µs.
- Las temperaturas entre 0 ℃ y 55 ℃ son óptimas para el funcionamiento.
- El rotador gira de 0 a 180 grados.
Equivalente a servomotor SG-90
- MG995 Engranaje de metal de alto torque.
- Engranaje metálico MG90S.
- VTS-08A Servo analógico.
¿Cómo elegir el servomotor adecuado?
- Cuando el proyecto necesita más torque
En primer lugar, los servomotores para aficionados funcionan en un rango de 4,8 V a 6,5 V. Un voltaje más alto, en este caso, produce un par más alto.
- Cuando el proyecto exige giros completos
Además, la mayoría de los servomotores para aficionados solo giran hasta 180 grados. Por lo tanto, si su proyecto exige más de un semicírculo, lo mejor es optar por un motor de rotación de 360 grados.
- Para aplicaciones que necesitan engranajes más fuertes
Los engranajes metálicos son una buena alternativa si su aplicación es de larga duración y necesita un motor más potente.
- Para proyectos que exigen más peso
La clasificación de par más común entre los servomotores es de 2,5 kg/cm en el motor Towerpro SG90. Este motor, por ejemplo, puede tirar de pesos de hasta 2,5 kg desde 1 cm de distancia.
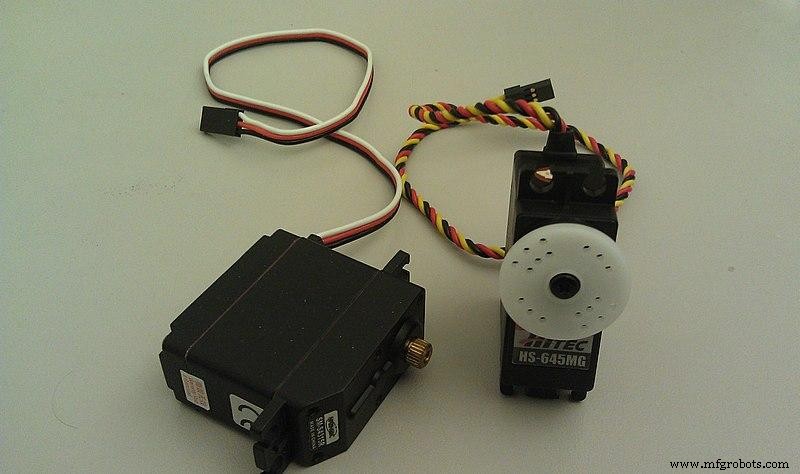
(Una vista de dos servomotores de hobby).
¿Cómo usar servos sg 90 en Arduino?
Los componentes necesarios
Para usar los servos SG90 en Arduino, necesita los siguientes componentes:
- Arduino Uno
- Servomotor SG90
- Alambres
- Una placa de prueba
Diagrama esquemático
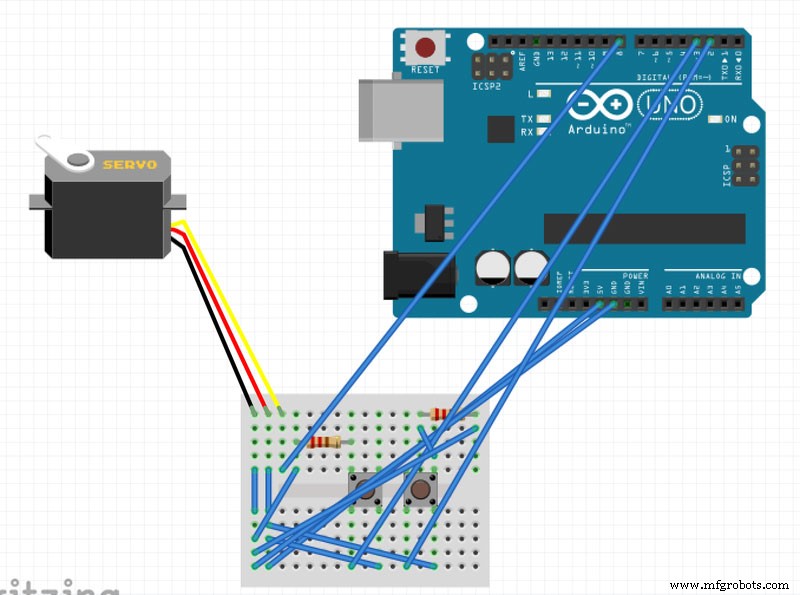
(Una conexión de servomotor a Arduino)
Pasos operativos
- En primer lugar, conecte el pin de señal del servo al pin digital 8 de Arduino. Esta conexión le permite enviar direcciones de servo como pulsos PWM al motor.
- A continuación, debe escribir el código Arduino para la aplicación.
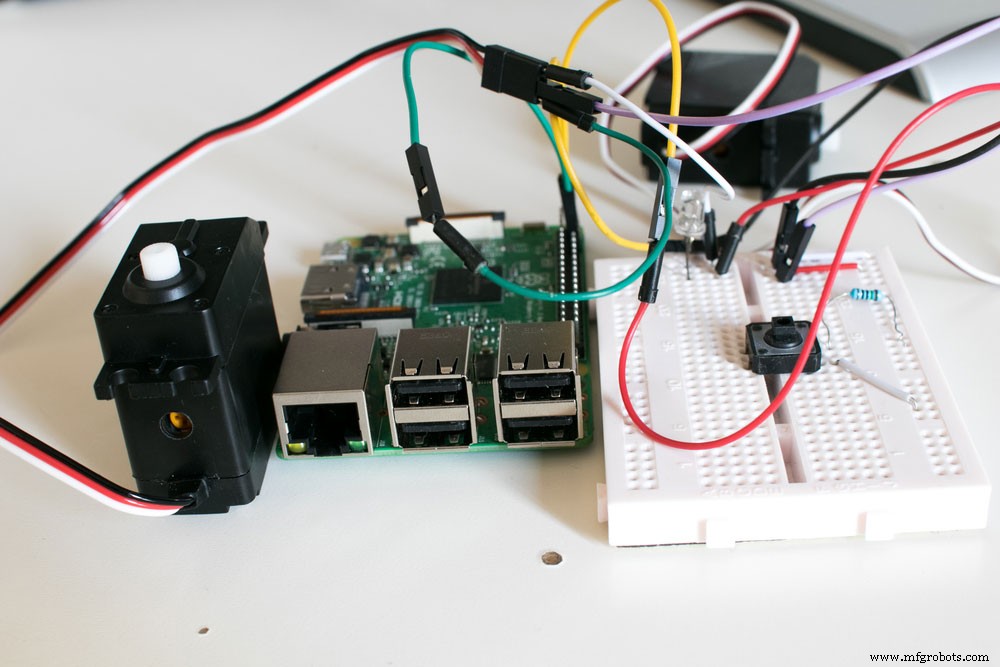
(Conexión del cableado del servomotor).
Solicitud
- Los servomotores funcionan como actuadores de robots en hexápodos, robots bípedos y brazos robóticos.
- Además, es una parte común del mecanismo de dirección de los juguetes RC.
- Los robots que requieren control de posición sin retroalimentación usan este motor.
- Debido a su naturaleza liviana, es útil en robots humanoides multi-DOF.
Conclusión
En resumen, los servomotores son una parte importante de las aplicaciones robóticas. Los servos SG 90, en particular, son ligeros y potentes al mismo tiempo. A diferencia de los motores de CC, tienen más pines, por lo tanto, más funcionalidad.
Sin embargo, aprender a usar servomotores es una cosa. Ponerlo en práctica es otra. Por lo tanto, al comenzar este tipo de proyectos, debe buscar ayuda profesional en una comunidad para desarrolladores. Contáctenos hoy.
Tecnología Industrial
- Circuitos de control del motor
- Motores paso a paso
- Motor de CC sin escobillas
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Obstáculos que evitan el robot con servomotor
- Arduino Nano:Controla 2 motores paso a paso con joystick
- Arduino / Android - Control de motor servo múltiple BLUETOOTH
- IQ Motion Control lanza una nueva gama de servomotores
- Emparejamiento de cabezales de engranajes con servomotores
- ¿Cómo se controla la velocidad de un motor hidráulico?