


Motor controlador L293D:cómo conectarlo a un motor de CC usando Arduino
Suponga que tiene la intención de diseñar un robot o un automóvil de juguete, el conocimiento sobre motores es primordial. Una forma muy rentable y fácil de controlar estos motores es usar un protector de motor de controlador L293D. Mejor aún, utilícelo en una interfaz con un microcontrolador como Arduino.
Entre otros, el controlador de motor L293D es uno de los conjuntos de chips más populares de su tipo. Más aún, por sus diversas aplicaciones en construcciones electrónicas como servos, motores paso a paso y motores de corriente continua. Sin embargo, su atributo crucial parece ser su dirección y control de velocidad en dos motores DC independientes. Y eso es lo que aprenderá más adelante en este instructable.
1. ¿Qué es el controlador de motor L293D?
Este conjunto de chips de 16 pines es un controlador de puente H de dos canales para motores. A menudo, su función principal es como interfaz de control para pares de motores de CC o en un solo motor paso a paso.
De forma predeterminada, el conjunto de chips de protección del controlador de motor L293D viene en dos. Por lo tanto, es capaz de impulsar cuatro motores de corriente continua. Por esa razón, el conjunto de chips L293D es un recurso de construcción valioso en robots de cuatro ruedas.
En total, el escudo te da cuatro puentes H. Por lo tanto, cada puente h entrega una corriente de motor de 0.6A. Además, el registro de desplazamiento 74HC595 es una característica de la seguridad. Este registro, como resultado, extiende los ocho pines de control del IC dual L293D a los pines de cuatro dígitos del Arduino.

(Un controlador de motor L293D de 16 pines y puente H de alta corriente cuádruple).
2. Características del controlador de motor l293D
Algunas características que hacen que el controlador de motor L293D sea un componente tan bueno en proyectos de robots y CNC incluyen:
- Le permite controlar la dirección y los niveles de velocidad en el dispositivo aplicado.
- Más interesante aún, el controlador hace posible hacer funcionar dos motores de CC duales similares.
- El voltaje del motor, Vs. (Vcc2) está entre 4,5 V y 36 V.
- Además, la corriente continua máxima del motor es de 600 mA.
- Por otro lado, la corriente máxima máxima del motor es de 1,2 A.
- La tensión de alimentación Vss(Vcc1) oscila entre 4,5 V y 7 V.
- El tiempo de transición es de 300 ns entre 5 V y 24 V, como máximo.
- Por activación térmica, es posible activar el apagado automático.
- Finalmente, el IC está disponible en paquetes de SOIC, DIP y TSSOP.
3.L293D Motor Driver Shield Configuración de pines de salida
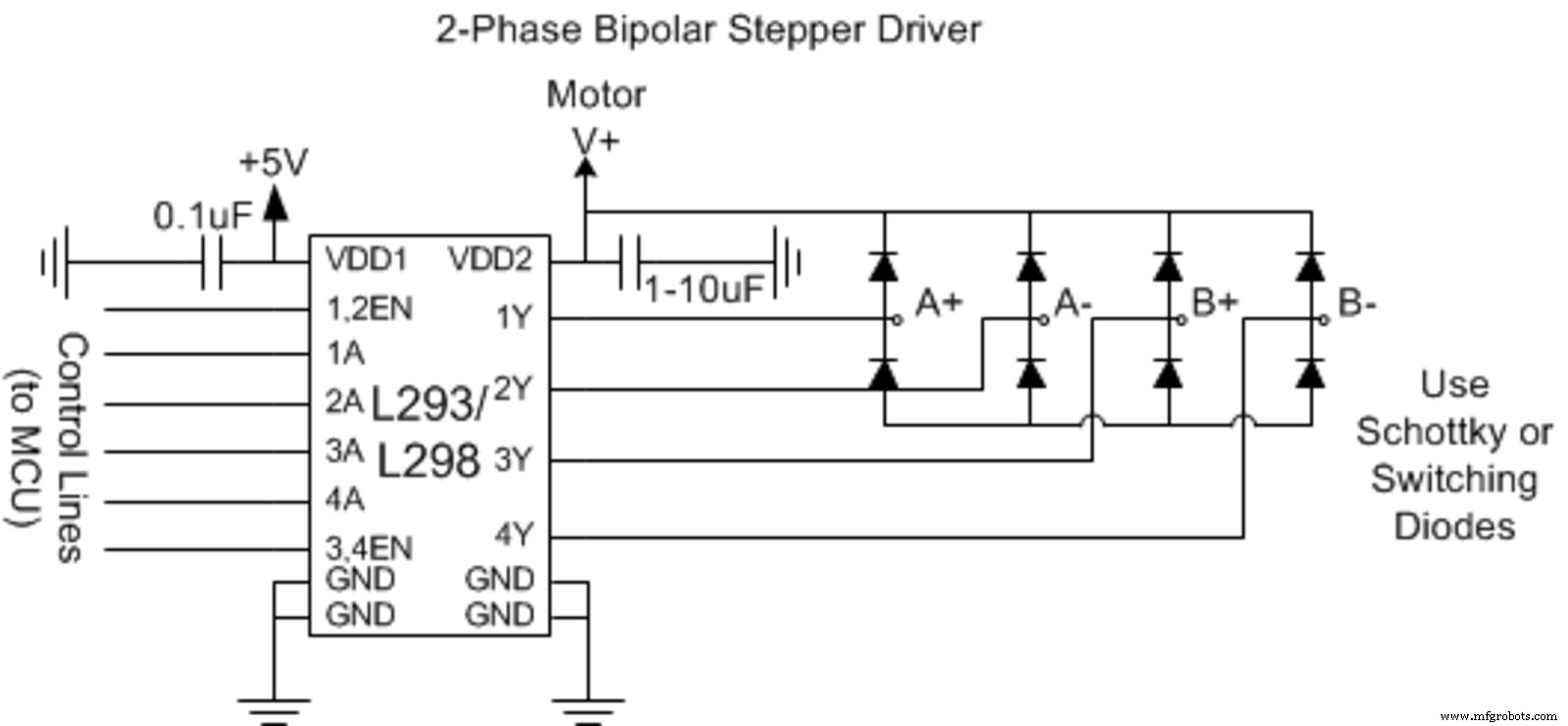
(Un diagrama esquemático de clavijas que muestra un controlador de motor paso a paso bipolar L293D).
| Número PIN | Nombre del pin | Descripción del pin |
| 1 | Habilitar 1,2 | Este terminal activa los pines de entrada:Entrada 1(2) y Entrada 2(7). |
| 2 | Pin de entrada 1 | Funciona como un control directo para el pin de Salida 1. A menudo, lo encuentra aplicable en el control de circuitos digitales. |
| 3 | Pin de salida 1 | Este pin se conecta a un extremo, Motor 1. |
| 4 | Tierra | En un extremo, este pin va a tierra del circuito (0V). |
| 5 | Tierra | Tenemos este otro pin de tierra (0V) en el otro lado. |
| 6 | Pin de salida 2 | Al igual que en el pin de salida 1, este terminal se conecta al otro extremo del motor 1. |
| 7 | Pin de entrada 2 | Controla directamente el pin de salida 2. También es aplicable en controles de circuitos digitales. |
| 8 | vs. (Vcc2) | Con una clasificación de 4,5 V-36 V, se conecta al pin de voltaje y alimenta los motores. |
| 9 | Habilitar 3,4 | Este terminal solo habilita los pines de entrada:Entrada 3(10) y Entrada 4(15). |
| 10 | Entrada 3 | Ofrece control directo para el pin de salida 3. Además, funciona como otra salida de control de circuito digital. |
| 11 | Salida 3 | Este pin se conecta a un extremo del Motor 2. |
| 12 | Tierra | Aquí, el pin de tierra conecta la tierra del circuito (0V) |
| 13 | Tierra | Otro pin de tierra conectado a tierra del circuito (0V) |
| 14 | Salida 4 | Al igual que la Salida 3, este pin también va al otro extremo del Motor 2. |
| 15 | Entrada 4 | En este extremo, ofrece control directo para el pin de salida 4. También funciona como un control de circuito digital. |
| 16 | Vss (Vcc2) | Finalmente, el pin se conecta a un voltaje externo de +5V encargado de alimentar el IC. |
4. Principio de funcionamiento del controlador de motor L293D
Como se destacó anteriormente, el controlador de motor L293D puede controlar motores de CC duales. Por lo tanto, es esencial comprender cómo funciona este circuito integrado de puente H de dos canales.
(Un diagrama que muestra un motor unipolar de 5 voltios conectado con un L293D).
La primera etapa del principio de funcionamiento consiste en establecer un puente H. En otras palabras, utiliza pares dobles de transistores Darlington que denominamos Q2/Q3 y Q1/4. Frente a cada uno, un diodo se conecta con el colector y el emisor de los transistores. Como resultado, evita que la EMF generada por el motor dañe los transistores.
Entonces, cuando los transistores Q1/Q4 están en la posición ON, los transistores Q2/Q3 se apagan. Por lo tanto, hay un flujo de corriente desde Vcc, a través del motor y hacia tierra.
Esta acción provoca un giro del motor en sentido horario/antihorario. En resumen, la polaridad del motor y el modo de conexión a la fuente de alimentación determinan la dirección de giro.
Por otro lado, cuando los transistores Q1/Q4 están apagados, Q2/Q3 se encienden automáticamente. Por lo tanto, hay un reverso en la corriente que fluye a través del motor. Entonces, cuando fluye esta corriente inversa, la dirección de rotación del motor también se alterna.
5. ¿Cómo usamos el controlador de motor L293D?
Como se mencionó anteriormente, el controlador de motor L293D utiliza una corriente de accionamiento bidireccional de aproximadamente 600 mA y un rango de 4,5 V-36 V. Sin embargo, estas características implican el uso de este chip controlador de motor de 16 pines con Arduino Uno.
Por lo tanto, presentamos un proyecto que conecta motores de CC y L293D a ARDUINO. Entonces, aquí hay un procedimiento paso a paso para configurar el circuito que controla la dirección y la velocidad del motor de CC.
Paso uno:Reúna los materiales que necesita para el proyecto.
- Dos potenciómetros de 10K.
- Conjunto de chips de controlador de motor L293D.
- Dos pequeños motores de CC.
- Arduino Uno o Arduino Pro Mini.
- Protoboard.
- Cables puente.
Paso dos:configurar el circuito
Las conexiones involucradas en este circuito son bastante sencillas.
Sin embargo, empleamos un video tutorial para configurar el circuito para una ilustración más precisa.
El motor suele estar mejor con una fuente de alimentación completamente diferente. En este caso, usamos 12V para el motor. Por otro lado, un suministro de 5V alimenta el L293D y Arduino.
Nota:La fuente de alimentación externa va al Pin 8 del L293D. Tome precauciones al hacer estas conexiones. De lo contrario, corre el riesgo de dañar los motores.
Paso tres:el código para programar un motor de CC
Vamos a hacer eso, y se requieren dos pasos básicos.
Instala la librería AFMotor.h.
En primer lugar, necesitamos un medio de comunicación con el L293D IC. Para ello, tenemos que instalar la librería AFMotor.h.
Esta biblioteca nos permite emitir comandos que controlan motores paso a paso, de solenoide y de CC.
Para instalar la biblioteca AFMotor.h, primero, desplácese hasta Sketch. Luego, busque "Incluir biblioteca", después de lo cual busque "Administrar bibliotecas". El administrador de la biblioteca actualiza la lista de bibliotecas instaladas a medida que el administrador de la biblioteca descarga el índice.
Luego, use el filtro de búsqueda para encontrar '"Motor Shield". Entre las entradas, seleccione Adafruit Motor Shield Library de Adafruit, luego haga clic en Instalar.
Ejecute el código Arduino
A continuación, tenemos que ejecutar el siguiente código Arduino:
#include
AF_DCMotormotor(4);
configuración vacía()
{
//Establecer la velocidad de inicio del motor y detener
motor.setSpeed(200);
motor.ejecutar(LIBERAR);
bucle vacío()
{
uint8_ti;
// Enciende el motor
motor.run(HACIA ADELANTE);
// Acelerar de 0 a velocidad máxima
para (i=0; i<255; i++)
{
motor.setSpeed(i);
retraso(10);
// Desacelerar de velocidad máxima a 0
para (i=255; i!=0; i–)
{
motor.setSpeed(i);
retraso(10);
// Luego, modifica la dirección del motor
motor.run(HACIA ATRÁS);
// Acelerar de 0 a velocidad máxima
para (i=0; i<255; i++)
{
motor.setSpeed(i);
retraso(10);
// Desacelerar de velocidad máxima a 0
para (i=255; i!=0; i–)
{
motor.setSpeed(i);
retraso(10);
// Ahora apaga el motor
motor.ejecutar(LIBERAR);
retraso(1000);
Paso 4:Configuración completa
En esta etapa, la configuración de su circuito de bricolaje está completa. Ahora tiene un mecanismo de control para cualquier dispositivo de motor de CC que utilice este chip L293D y el microcontrolador Arduino Uno.
6.IC de temporizador doble equivalente L293D
Otros circuitos integrados similares a L293D incluyen ULN2003, SN754410, LB1909MC.
(Un IC ULN2003 en una PCB que muestra los pines etiquetados y los puntos de conexión)
7. Las aplicaciones de L293D
- Te ayuda a controlar dispositivos LED de alta corriente.
- Además, es aplicable en motores de alta corriente operados por circuitos digitales como los robots.
- El controlador L293D es una parte integral de motores paso a paso y motores, en general.
- Para uso en módulos de controlador de relé. Por lo tanto, hace posible un relé de enganche.
Resumen
Existen otros métodos diferentes para controlar motores de CC usando Arduino en más de un sentido. Sin embargo, una de las formas más sencillas es utilizar un controlador de motor IC L293D. Un L293D IC brinda una ventaja para controlar simultáneamente la velocidad y la dirección de dos motores de CC separados.
En conclusión, hemos aprendido cómo configurar y programar un motor de CC con este IC. Pero, tal vez, quieras probar algo más desafiante. Para obtener más tutoriales sobre cómo hacer esto, comuníquese con nuestra página de contacto para obtener una guía completa.
Tecnología Industrial
- Sistema de robótica de detección humana con Arduino Uno
- Lectura de la señal PPM del receptor RC usando Arduino
- Juguete controlado por Android con Raspberry Motor Shield
- Cómo medir la masa de la Tierra usando Arduino
- Cómo crear un sitio web comunicando Arduino usando PHP
- Brazo de robot Arduino DIY:controlado por gestos con las manos
- Arduino - Dibujar vía web usando el controlador de motor paso a paso
- Cómo hacer un mini osciloscopio en casa usando Arduino Nano
- Cómo funciona un motor de CC con escobillas
- Cómo hacer una brújula usando Arduino y Processing IDE
- Cómo comprobar un motor de CC