


¿Cómo funcionan los sensores de tiempo de vuelo (ToF)? Una mirada a las cámaras 3D ToF
¿Cómo determinan las distancias los sensores de tiempo de vuelo? Obtenga más información sobre las cámaras ToF con una cámara 3D de ejemplo.
¿Cómo determinan las distancias los sensores de tiempo de vuelo? Obtenga más información sobre las cámaras ToF con un ejemplo de cámara 3D.
Hay tres tecnologías líderes de imágenes en 3D que compiten por el espacio en su teléfono celular y su automóvil. Esas tecnologías son imágenes estereoscópicas, proyección de luz estructurada y cámaras de tiempo de vuelo (o ToF). Los datos que generan estos dispositivos pueden proporcionar detección de peatones, autenticar a los usuarios según los rasgos faciales, detectar el movimiento de la mano y alimentar algoritmos SLAM (localización y mapeo simultáneos).
Dos de los jugadores más grandes en este espacio son ams e Infineon. En el momento de escribir este artículo, ams lleva uno de cada tipo de sensor e Infineon se centra solo en los sensores de tiempo de vuelo.
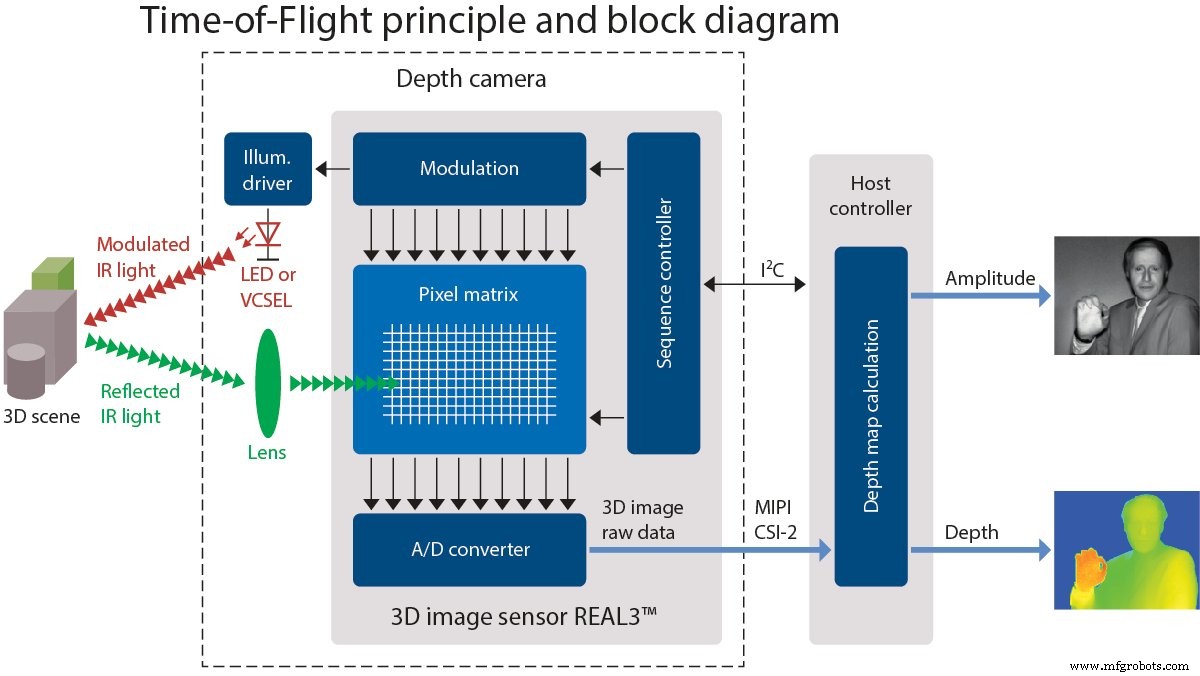
Este artículo describe la tecnología detrás de los sensores de tiempo de vuelo centrándose en un kit de desarrollo de cámara 3D "pico flexx" de pmdtechnologies. (Antes de preguntar, tanto "pico flexx" como "pmdtechnologies" se presentan en minúsculas en su sitio web).
El pico flexx se basa en el sensor de imagen 3D REAL3 desarrollado conjuntamente por Infineon y pmd.
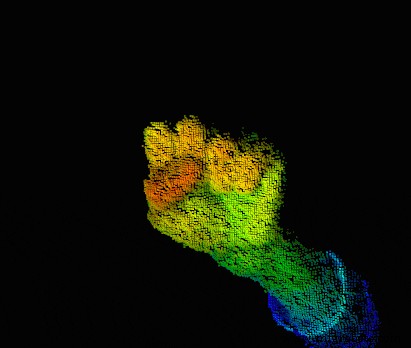
Imagen 3D en falso color de una mano tomada de pmdtec.com el 29 de abril de 2019. Los colores se asignan a píxeles individuales según la distancia del sensor a la mano (el rojo está cerca, el azul está lejos)
Tenga en cuenta que pmd nos proporcionó un dispositivo para este artículo.
¿Qué es un sensor de tiempo de vuelo?
Los sensores de tiempo de vuelo miden el tiempo que le toma a algo viajar una distancia a través de un medio. Por lo general, esta es la medición del tiempo transcurrido entre la emisión de un pulso de onda, su reflejo en un objeto y su regreso al sensor ToF. Una cámara de tiempo de vuelo es un dispositivo que utiliza la medición de ToF para determinar las distancias entre la cámara y los objetos o entornos, creando imágenes generadas por puntos medidos individualmente.
Las aplicaciones de las cámaras ToF incluyen sistemas de imágenes LiDAR sin escáner basados en láser, detección y seguimiento de movimiento, detección de objetos para visión artificial y conducción autónoma, mapeo topográfico y más.
Pero, ¿cómo se logran estas medidas?
A continuación, he representado tres formas de utilizar el tiempo de viaje para determinar la distancia.
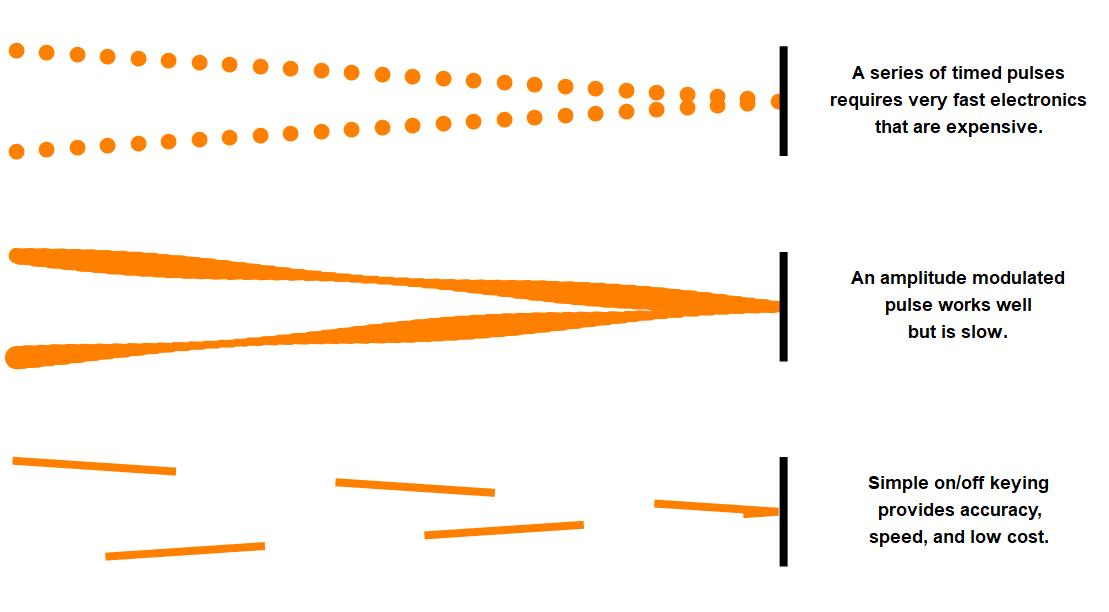
Métodos para usar el tiempo de viaje para determinar distancias
En la parte superior de la imagen, puede ver el primer método, que consiste en enviar pulsos y medir el intervalo de tiempo hasta que regresan después de la reflexión.
La mitad de la imagen muestra el segundo método, en el que puede modular la amplitud de una fuente de luz y registrar el cambio de fase de la onda reflejada.
La parte inferior de la imagen representa el tercer método, que transmite una onda cuadrada del ciclo de trabajo del 50% y registra la cantidad de luz devuelta que llega en un intervalo específico.
Cámaras ToF de precisión de nivel milimétrico
Las ondas de luz y radio viajan a casi 300,000,000,000 mm / s, lo que se traduce en ~ 3.3 ps para que una onda viaje 1 mm (y otros 3.3 ps para regresar). Eso significa que si desea un dispositivo que pueda obtener imágenes de todos los objetos en la habitación en la que se encuentra y desea una resolución de ~ 1 mm, su electrónica de sincronización necesitaría una resolución de picosegundos. Eso se traduce en una velocidad de reloj de cientos de GHz.
No es fácil ni económico diseñar circuitos electrónicos que operen en esas frecuencias, por lo que los diseñadores tuvieron que encontrar una forma de trabajar en frecuencias más bajas si esperaban llevar los dispositivos asequibles al espacio del consumidor.
Existen dos métodos comunes para lograr una precisión de nivel milimétrico mientras se trabaja con frecuencias razonables de sub-GHz:
- Relacionar el cambio de fase de una onda modulada sinusoidalmente a la distancia
- Usar el cambio de fase de una onda cuadrada de ciclo de trabajo del 50% y un voltaje diferencial para determinar la distancia
En las secciones siguientes, veremos estos dos métodos con mayor detalle.
Determinación de la distancia por cambio de fase de una onda de amplitud modulada
Supongamos que está buscando diseñar una oficina pequeña o una sala de estar grande con una dimensión de longitud máxima de 15 m. Para determinar una frecuencia de operación apropiada para esa longitud, use $$ c =\ lambda \ cdot f $$ donde c es la velocidad de la luz (c =3x10 8 m / s), λ es una longitud de onda (λ =15 m) y ƒ es la frecuencia. En este ejemplo, ƒ =20 MHz, que es una frecuencia relativamente fácil de trabajar.
Todo comienza cuando una luz brillante tiene su salida modulada con una señal sinusoidal de 20 MHz. La onda de luz eventualmente alcanzará un objeto o la pared y reflejará e invertirá las direcciones. Una versión más tenue de la luz modulada original regresará al receptor. A menos que el objeto esté exactamente a un múltiplo entero de 15 metros de distancia, la fase se desplazará en cierta medida.
El cambio de fase se puede utilizar para calcular la distancia recorrida por la onda.
Si puede medir con precisión el ángulo de fase, puede determinar con precisión la distancia entre el objeto reflectante y el sensor / receptor.
Cómo medir el ángulo de fase de una sinusoide
Entonces, ¿cómo se mide rápidamente el ángulo de fase de una sinusoide? Eso implica medir la amplitud de la señal recibida en cuatro puntos igualmente espaciados (es decir, una separación de 90 ° o 1/4 λ).
$$ \ varphi =ArcTan \ left (\ frac {A_1-A_3} {A_2-A_4} \ right) $$
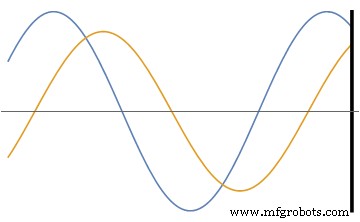
He intentado ilustrar la relación entre las medidas y el ángulo de fase a continuación. La razón de la diferencia entre A 1 y A 3 y la diferencia entre A 2 y A 4 es igual a la tangente del ángulo de fase. ArcTan es en realidad la función arco-tangente de dos argumentos que mapea los cuadrantes apropiados y define cuándo A 2 =A4 y A 1 > A 3 o A 3 > A 1 como 0 ° o 180 °, respectivamente.
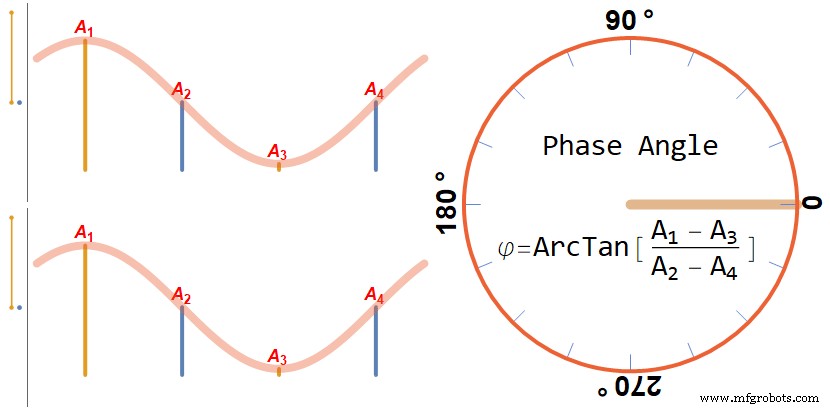
Haga clic en el diagrama para ver una imagen más complicada que ilustra cómo las diferencias de las variables A 1 , A 2 , A 3 y A 4 encajar en el círculo unitario.
En la ilustración de arriba, el extremo izquierdo del gráfico tiene dos líneas numéricas verticales que muestran el resultado de restar A 1 y A 3 (representado como amarillo oscuro) y A 2 y A 4 (representado como azul). Los valores medidos se muestran como líneas verticales en los gráficos sinusoidales del medio.
Tenga en cuenta que este gráfico no tiene en cuenta la reflexión (que efectivamente cambiaría todo 180 °).
Determinación de la frecuencia operativa para una distancia determinada
Volviendo a nuestro ejemplo, la distancia al objetivo se determina con la ecuación:
$$ d =\ frac {c \ cdot \ varphi} {4 \ pi \ cdot f} $$
Donde c es la velocidad de la luz, phi (φ) es el ángulo de fase (en radianes) y ƒ es la frecuencia de modulación.
La medición del tiempo de vuelo real de un fotón requiere componentes electrónicos de 333 GHz. Este método requiere un máximo de 4 veces la frecuencia de modulación, que en este caso es 4x20 MHz =80 MHz. Esta es una reducción fenomenal de recursos. Pero te alegrará saber que algunos ingenieros inteligentes encontraron una manera de reducir aún más la frecuencia máxima.
Determinación del cambio de fase mediante la medición del voltaje diferencial de los capacitores cargados
La siguiente situación de medición involucra una fuente de luz estroboscópica y un sensor de imágenes CMOS con dos capacitores por píxel.
Una fuente de reloj genera una onda cuadrada de ciclo de trabajo del 50% y esa onda cuadrada controla una fuente de luz estroboscópica brillante, así como la conexión a los condensadores de almacenamiento de carga dentro de cada píxel.
Un ejemplo de un sistema de este tipo se representa en la imagen a continuación:
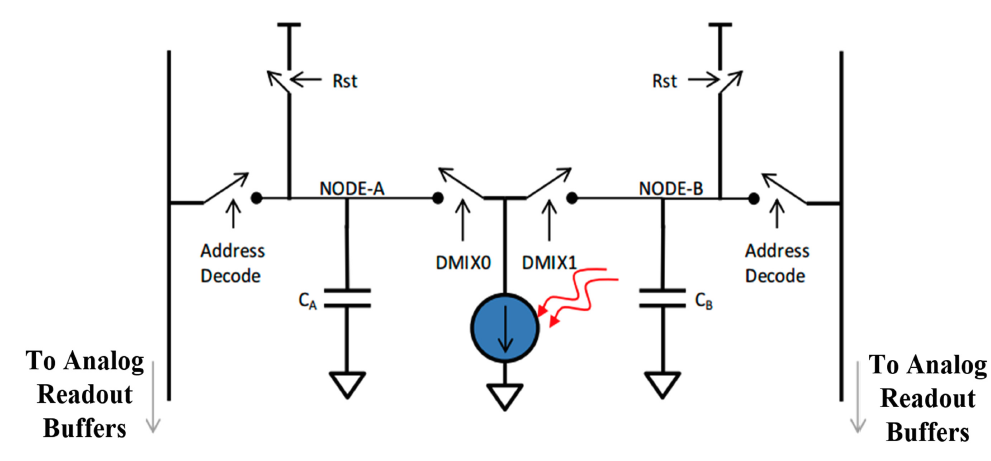
Imagen de “Un método de calibración rápido para dispositivos mezcladores fotónicos de estado sólido LiDARS” Esto muestra un píxel CMOS con dos condensadores de almacenamiento de carga que se conectan alternativamente para registrar la entrada ligero.
La luz sale de la fuente, se refleja en un objeto y golpea el píxel donde se registrará como una carga en el condensador C A o C B mostrado anteriormente. Los condensadores se conectan alternativamente al píxel a la misma frecuencia que la fuente de iluminación, utilizando la misma fuente de reloj.
Esta inteligente disposición significa que la carga diferencial en los condensadores se relaciona directamente con el desfase. Y la fase está determinada por la longitud de onda y la distancia al objetivo y viceversa.
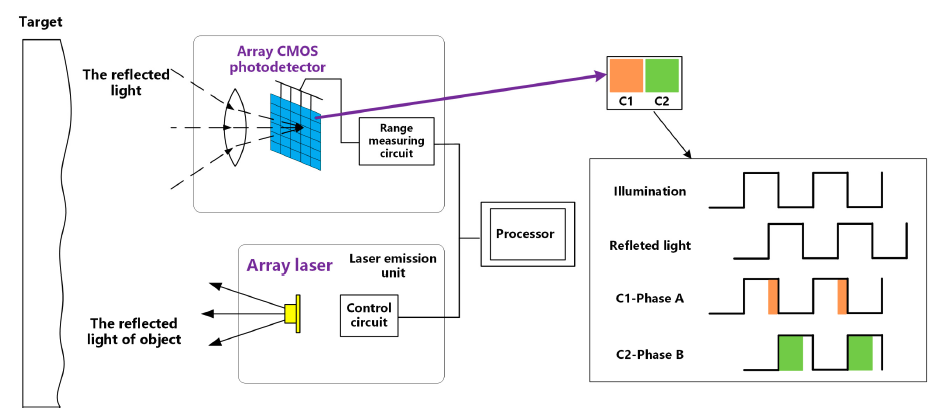
Imagen de “Un método de calibración rápida para dispositivos de mezcladores fotónicos de estado sólido LiDARS”
El sujeto puede iluminarse durante tantos ciclos como sea necesario para llenar los condensadores. Siempre que la distancia sea constante, las proporciones de carga seguirán siendo las mismas
Sensores de tiempo de vuelo en acción
¿Qué tan bien funciona este método? Mejor de lo que cabría esperar.
El sensor proporcionado a AAC, combinado con el software que lo acompaña, tiene la capacidad de grabar hasta 45 fps. Con frecuencias de actualización más bajas, el sistema puede visualizar fácilmente las arrugas en una camisa.

La imagen de arriba traza la ubicación del vértice (x, y, z) de cada píxel capturado de la cámara pico flexx de pmd.
Los datos de solo profundidad son difíciles de visualizar por sí mismos. Por lo tanto, la imagen de profundidad a menudo se combina con una fotografía o se muestra usando colores falsos para permitir una visualización más fácil de la escena.
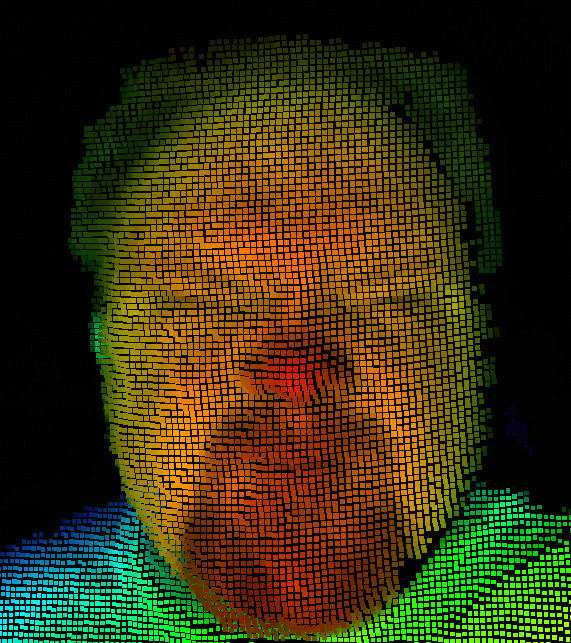
Una superposición de profundidad de color falso de una imagen de baja resolución facilita la interpretación de la escena. Imagen del autor de Goober capturada con el software Royal Viewer de pmd y el kit de desarrollo CamBoard pico flexx 3D.
Los sensores de tiempo de vuelo se pueden utilizar en una variedad de aplicaciones, incluida la creación de un mapa 3D del entorno cuando se combina la física inteligente con la ingeniería.
¿Ha utilizado alguna vez cámaras 3D en su trabajo? ¿Qué nos puede decir acerca de las limitaciones de diseño de usar sensores de tiempo de vuelo? Comparta sus experiencias en los comentarios a continuación.
Tecnología Industrial
- ¿Qué son las llamadas WiFi? ¿Cómo funciona?
- Problemas con las personas:¿Cómo los está manejando?
- ¿Cómo funcionan los sistemas SCADA?
- ¿Cómo funciona la detección de descargas parciales en los interruptores?
- Equipo de trabajo:¿Es hora de actualizarlo?
- Cómo funciona un motor de CC con escobillas
- Cómo funcionan los sensores de nivel de Biz4Intellia:su rendimiento y vida útil
- Cómo reducir el tiempo de transición con SMED y trabajo estándar
- ¿Cómo funcionan los secadores de aire?
- Tiempo de vuelo frente a sistemas FMCW LiDAR
- Cómo funcionan los frenos eléctricos