


Un sensor de campo magnético flexible basado en AgNWs y MNs-PDMS
Resumen
Este artículo presenta un nuevo sensor de campo magnético flexible basado en nanocables de Ag y nanopartículas magnéticas dopadas en polidimetilsiloxano (AgNWs &MNs-PDMS) con estructura sándwich. Los MN actúan como la unidad sensible para la detección de campos magnéticos en este trabajo. Además, las redes conductoras están hechas por AgNW durante la deformación. La magnetoestricción conduce al cambio de resistencia de los sensores AgNWs y MNs-PDMS. Además, los MN aumentan las rutas conductoras de los electrones, lo que conduce a una menor resistencia inicial y una mayor sensibilidad del sensor resultante durante la deformación. Un punto que vale la pena enfatizar es que la interacción de los AgNW y los MN juega un papel insustituible en la detección del campo magnético, por lo que se investigó el cambio de resistencia durante el estiramiento y la contracción. El sensor de campo magnético flexible basado en la relación de masa de MN y AgNW es 1:5 mostró la sensibilidad más alta de 24,14 Ω / T en el experimento de detección de campo magnético. Finalmente, se estableció el modelo de detección magnetoestrictiva y piezorresistiva para explorar el mecanismo del sensor.
Antecedentes
Los dispositivos electrónicos flexibles han atraído recientemente una gran atención debido a sus capacidades de monitoreo a largo plazo de fácil interacción [1, 2, 3, 4, 5]. Se convierten en uno de los sensores eléctricos más prospectivos debido a las ventajas como peso ligero, portátil, excelentes propiedades eléctricas y alta integración [6,7,8,9,10,11]. Indudablemente, los nanomateriales juegan un papel insustituible en los sensores flexibles debido a sus propiedades sobresalientes, por ejemplo, tamaños pequeños, efecto de superficie y efecto de túnel cuántico [12,13,14]. Basándose en el efecto túnel resonante de los nanomateriales, muchas investigaciones se centran en sensores de deformación piezorresistivos cuyas resistencias cambian con la deformación [15,16,17]. Una de las aplicaciones clave de los sensores de deformación suave es la piel electrónica flexible, por lo que las multificcionalizaciones son la tendencia de desarrollo de los sensores. Algunos informes declararon la adición de módulos sensores de temperatura [18, 19] y humedad [20, 21] en las matrices de sensores de deformación.
Además de las capacidades de detección de tensión, temperatura y humedad, las matrices electrónicas de detección de piel necesitan urgentemente algunas funciones nuevas. En otras palabras, más funciones hacen que la piel electrónica sea más inteligente. Entre las nuevas funciones, la detección de campo magnético es una aplicación novedosa. Cabe mencionar que solo el sensor de campo magnético suave se puede utilizar como módulo para la piel electrónica en el futuro. La propiedad de sensores de campo magnético suave se puede utilizar en áreas más complejas en función de su flexibilidad y elasticidad, algunos investigadores están trabajando en este campo [22,23,24,25,26]. Chlaihawi y col. sensor de película delgada flexible ME preparado para H ac aplicaciones de detección [27]. Jogschies et al. investigó capas delgadas de poliimida NiFe 81/19 para la detección de campos magnéticos [28]. Tekgül y col. aplicó las multicapas magnéticas CoFe / Cu en sensores GMR [29]. Melzer y col. informaron de sensores de campo magnético flexibles que se basaban en el efecto Hall [30]. También se han estudiado varios sensores de campo magnético óptico flexible [31,32,33,34]. En comparación con los detectores de campo magnético tradicionales, los sensores de campo magnético flexibles son más convenientes de aplicar y son más pequeños y más adecuados para la detección en entornos complejos. Sin embargo, los estudios sobre el sensor de campo magnético suave frente a la piel electrónica multifuncional rara vez se han informado hasta donde sabemos.
Debido a las excelentes propiedades electrónicas y magnéticas de los Ag NWs [35,36,37] y los MNs (Ni-Fe) [38, 39] respectivamente, este artículo propone el diseño y medición de sensores de campo magnético flexibles AgNWs y MNs-PDMS con estructura sándwich a base de efectos magnetostrictivos y piezorresistivos. Los MN se introdujeron como unidades sensibles al campo magnético en el sensor de deformación piezorresistivo basado en AgNW. La diferente deformación magnetoestrictiva del sensor basado en AgNWs y MNs-PDMS provoca las diferentes variaciones de resistencia. Después de la caracterización de los nanomateriales, se utilizaron tres relaciones de masa diferentes de MN y AgNW (AgNW y MN; 1:1, 1:2, 1:5) para preparar sensores de campo magnético flexibles. Antes de que se investigaran las propiedades de detección del campo magnético de los sensores, se estudiaron las relaciones entre los cambios de resistencia y el estiramiento o retracción para concluir la interacción de MN y AgNW. Con base en los resultados de la caracterización, el sensor de campo magnético obtenido en este trabajo se puede aplicar en electrónica multifuncional en el futuro.
Métodos
Preparación de sensores flexibles
Los MN se sintetizaron mediante el método de composición de látex [24, 25]. El diámetro y la longitud de los AgNW (que se compraron a Changsha Weixi New Material Technology Corporation, China, en longitud) son de 50 nm y 20 μm, respectivamente. Se eligieron diferentes proporciones de MN y AgNW para investigar la cantidad adecuada de nanomateriales. Por tanto, los MN y los AgNW en una proporción de masa de 0:1, 1:5, 1:2 y 1:1 se dispersaron por ultrasonidos en etanol absoluto. La figura 1 muestra el esquema del proceso de fabricación del sensor. El elastómero PDMS y el reticulante en una proporción de masa de 10:1 se dejaron caer sobre el sustrato con una cinta rectangular pegada. Después de calentar a 70 ° C durante 2 h, el PDMS con ranura se despegó y se cortó en la forma requerida, y el tamaño de la ranura es de 30 mm x 5 mm. Se rellenaron cuatro muestras de AgNW y MN en diferentes proporciones en las muescas de las películas de PDMS, respectivamente. Se instalaron dos electrodos de cobre blando en ambos lados, y luego se dejó caer el PDMS en la parte superior para fijar los electrodos y nanomateriales. Después de calentar a 70 ° C durante 2 h, se obtuvieron los sensores.
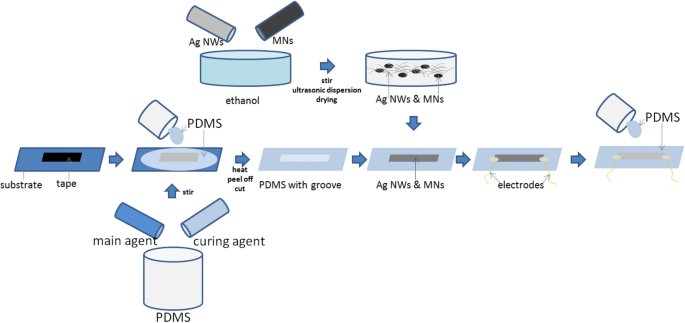
Esquema del diagrama de flujo del proceso de fabricación y diseño estructural del sensor
Caracterización
Los AgNW y MN con diferentes proporciones de mezcla se caracterizaron mediante microscopio electrónico de barrido (SEM, S4700 SEM Hitachi Corporation, Tokio, Japón). Los componentes de AgNW y MN en diferentes proporciones de masa se caracterizaron mediante mediciones de XRD (Buker D8 Advance) utilizando radiación de Cu K de longitud de onda de 1,5406 Å.
Las curvas de corriente-voltaje se midieron con el medidor de fuente Keithley 2400 a temperatura ambiente (la temperatura ambiente era de 25 ° C). Los experimentos de estiramiento se llevaron a cabo en la plataforma de estiramiento (Zolix TSM25-1A y Zolix TSMV60-1 s, Zolix Corporation, Beijing, China), y la resistencia de los sensores se midió con Keithley 2400 Source Meterat. Se realizaron experimentos de detección de campo magnético cuando el sensor flexible se fijó en un campo magnético diferente. La intensidad del campo magnético comenzó desde 0 T y aumenta en 0,1 T.
Resultados y discusión
El espectro XRD de los MN se muestra en la Fig. 2. Los picos característicos sugieren que los MN están compuestos por FeCo, FeNi y Co (OH) 2 . El resultado demuestra que todas estas composiciones son materiales magnéticos.
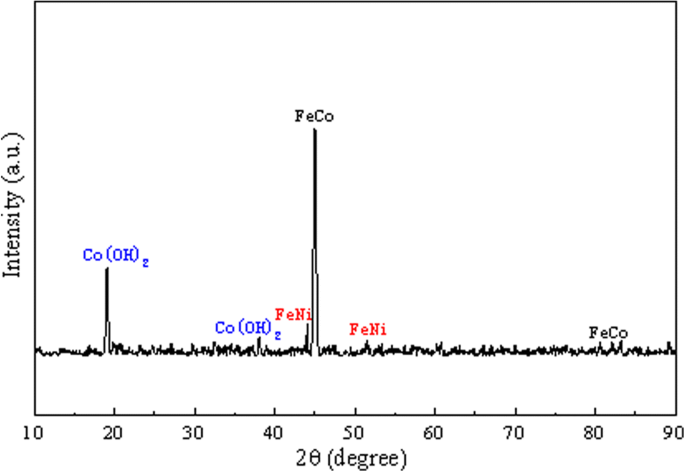
El espectro XRD de MN
Las imágenes SEM de AgNW y MN se muestran en la Fig. 3. Los Ag NW puros con 20 µm de longitud y 50 nm de diámetro forman una red lineal que se puede observar en la Fig. 3a. Las morfologías de AgNW y MN en una proporción de masa de 5:1, 2:1 y 1:1 se muestran en la figura 3b-d. En la figura 3b se pueden observar pequeñas cantidades de MN entre Ag NW. Las redes de la Fig. 3c son más escasas que las de la Fig. 3a, obviamente b. Además, la flexión de los AgNW y más MN se puede ver en la Fig. 3d. Las redes conductoras construidas por AgNW y la cantidad de MN aumentan aparentemente en la Fig. 3a-d. La mezcla uniforme de Ag NW y MN, que se muestran en la Fig. 3a-d, juega un papel de conexión para aumentar la sensibilidad de los sensores cuando se estiran o encogen. Los roles que jugaron los AgNW y los MN pueden explicarse por los resultados de la Fig. 3.
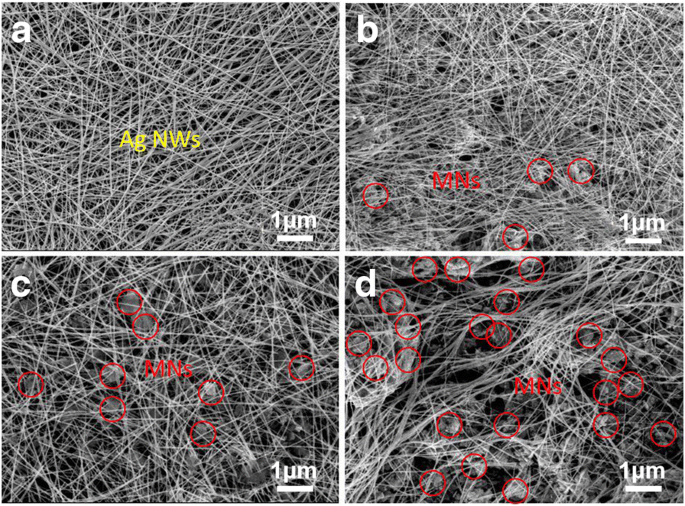
un AgNW y MN en una proporción de masa de 1:0, b 5:1, c 2:1 y d 1:1
Las curvas IV de los sensores basadas en AgNW y MN en una relación de masa de 1:0, 5:1, 2:1 y 1:1 se muestran en la Fig. 4. Las cuatro curvas son todas líneas rectas suaves, que representan el cuatro sensores muestran características óhmicas significativas. Declara que estos sensores son conductores y estables sin deformarse.
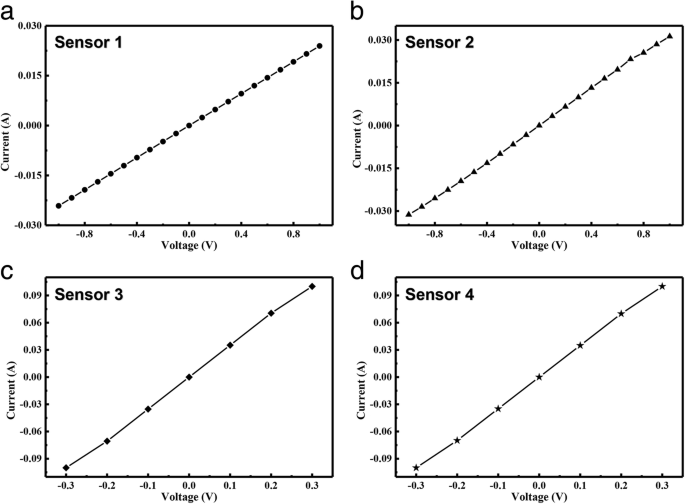
Curvas I-V de los sensores basadas en AgNW y MN en una relación de masa de a 1:0, b 5:1, c 2:1 y d 1:1
Se puede calcular a partir de la Fig. 4a que la resistencia del sensor es 41,58 Ω cuando la unidad sensible es AgNWs puros. Las resistencias de los sensores basadas en AgNW y MN en una relación de masa de 1:0, 5:1, 2:1 y 1:1 son 30,2 Ω, 5,04 Ω y 2,87 Ω como se muestra en la figura 4b – d. Muestra una tendencia a la disminución de la resistencia cuando se introducen MN en células sensibles. Comparando las resistencias de los cuatro sensores, se puede concluir que las resistencias de los sensores de campo magnético flexible disminuyen con la proporción creciente de MN, y la resistencia mínima ocurre en el sensor con AgNWs y MNs en una relación de masa de 1:1. También puede probar que la mezcla de AgNW y MN en una cierta proporción ayuda a reducir la resistencia, porque los componentes conductores de los MN condujeron a caminos más conductores en las redes.
Se estudiaron las relaciones entre cambios de resistencia y estiramiento o retracción para concluir la interacción entre MN y AgNW durante la deformación. Los cambios de resistencia relativa de los sensores basados en AgNW y MN con extensión a temperatura ambiente se muestran en la Fig. 5a – d. El cambio de resistencia durante el proceso de estiramiento se representa mediante curvas negras y el cambio de resistencia durante el proceso de liberación se representa mediante curvas rojas. Δ R y R 0 representan el cambio de resistencia relativo bajo la deformación y la resistencia inicial del sensor, y L 0 y Δ L representan la longitud inicial y el alargamiento relativo de la muestra axial del sensor. El factor de calibre de los sensores podría calcularse mediante la ecuación del factor de calibre (GF) =Δ R / R 0 :Δ L / L 0 . La Figura 5a muestra que el sensor basado en AgNWs es conductor en el proceso de estiramiento y recuperación cuando la longitud de tracción está dentro del 7,12% de la longitud original y su GF es de 129,6. La resistencia aumenta durante el estiramiento. Esto se puede atribuir al aumento en el espacio entre AgNW en el sensor durante la deformación, los canales de tunelización y la trayectoria conductora se reduce de esta manera. El proceso inverso provocó la disminución de la resistencia durante la retracción. Cuando se introducen los MN en la unidad sensible, las características de detección de tensión del dispositivo flexible también cambian. La resistencia del sensor basada en AgNW y MN en una relación de masa de 5:1 cambia casi linealmente cuando el rango de estiramiento está dentro del 4.4% de la longitud original en la Fig. 5b. Cuando la longitud de tracción es más del 3,9% de la longitud original, se produjeron los mayores aumentos de resistencia. El GF del sensor aumenta a 257, lo que significa que la sensibilidad del sensor aumentó en comparación con el sensor basado en AgNW puros. Sin embargo, el rango de deformación no mejora por la participación de los MN en una relación de masa de 5:1, que se puede observar en la Fig. 5a, b. La Figura 5c demuestra que la resistencia del sensor basado en AgNW y MN en una relación de masa de 2:1 cambia linealmente cuando el rango de estiramiento está dentro del 8.7% de la longitud original, y el GF del sensor es 264.4, que es más alto que el de los sensores basados en AgNW y MN en una relación de masa de 1:0 y 5:1. En la Fig. 5d, la resistencia del sensor basada en AgNW y MN en una relación de masa de 1:1 cambia linealmente cuando el rango de estiramiento está dentro del 9% de la longitud original. Cuando la longitud de tracción es más del 9% de la longitud original, la resistencia cambia sustancialmente y el GF es 222,2. En resumen, el sensor de campo magnético flexible basado en AgNW y MN en una relación de masa de 2:1 muestra el mayor GF de 264,4 y tiene un rango extensible relativamente grande. Además, este sensor responde de manera más sensible a medida que aumenta la tensión, el cambio de resistencia también tiene una mejor relación lineal. El ingrediente principal de los MN es el FeCo, que es una aleación conductora. Comparando estos cuatro tipos de sensores, la participación de más MN crea más trayectorias conductoras en las unidades sensibles durante el estiramiento. Sin embargo, una mayor proporción de MN en Ag NW y MN en la misma calidad significa una menor cantidad de Ag NW, lo que es perjudicial para la estabilidad de la red conductora durante la deformación. Esa es la razón de la caída relativa de la resistencia al 9% de desplazamiento. En consecuencia, los AgNW y MN en una relación de masa de 1:1 es la cantidad de MN más alta que diseñamos en este trabajo, y el sensor basado en los AgNW y MN en una relación de masa de menos de 1:1 no es conductor tan pronto como se estire. Los resultados de la Fig. 5 demuestran que los efectos sinérgicos de los AgNW y los MN en ciertas proporciones aumentan la sensibilidad y el rango de deformación.
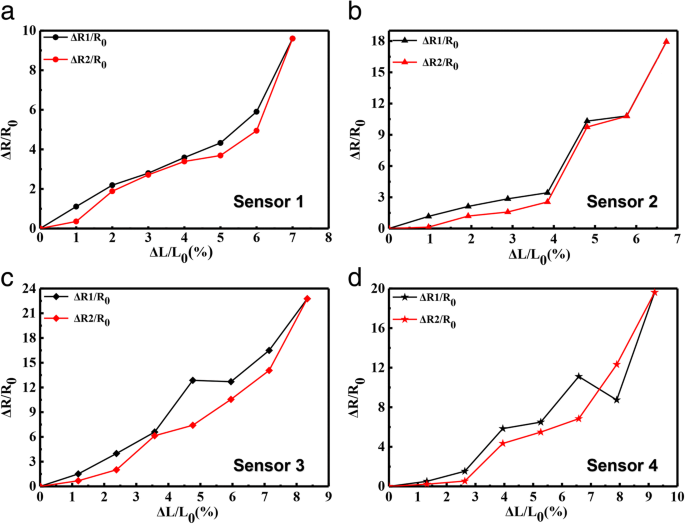
Los cambios de resistencia relativa de los sensores basados en AgNW y MN en una relación de masa de a 1:0, b 5:1, c 2:1 y d 1:1 con deformación
Los MN pueden acercarse bajo el campo magnético, por lo que la magnetoestricción puede provocar la contracción de los sensores. Para caracterizar la interacción de AgNWs y MNs en los sensores durante la contracción, medimos el cambio de resistencia durante la contracción, y los resultados experimentales se muestran en la Fig. 6. La Figura 6a muestra que el sensor basado en AgNWs es conductor en el proceso de encogimiento y recuperación cuando la longitud de la contracción está dentro del 1.6% de la longitud original, y su GF más alto es 13.75; Los AgNW incrustados en PDMS entran en contacto durante el proceso de contracción, lo que conduce al aumento de las rutas de conducción. Por lo tanto, la resistencia disminuye a medida que aumenta la fuerza contráctil. La disminución en el espacio entre AgNW en el sensor, más y más nanocables se superponen, lo que resulta en una disminución de la resistencia del sensor. Cuando introdujimos los MN en los AgNW, la figura 6b ilustra que las características de contracción del dispositivo flexible se basan en los AgNW y los MN en una relación de masa de 5:1. La resistencia del sensor cambia con el rango de contracción es 2.5% de la longitud original, y el GF más alto es 24. Básicamente, el mismo cambio en la resistencia también se aplica a los sensores basados en AgNWs y MNs en una relación de masa de 2:1 y 1:1, que se muestra en la Fig. 6c, d. Al aumentar la relación de masa de MN en unidad sensible, la resistencia del sensor basada en AgNW y MN en relación de masa de 2:1 cambia cuando el rango de contracción está dentro del 1,6% de la longitud original y su GF es 21,875. Al mismo tiempo, la resistencia de los sensores basados en AgNW y MN en una relación de masa de 1:1 también disminuyó cuando el rango de contracción está dentro del 2.8% de la longitud original y su GF es 20.35. Se puede concluir que el cambio de resistencia del sensor basado en los AgNW y MN en una relación de masa de 5:1 con encogimiento es mayor que el de los otros tres sensores, y la sensibilidad es mayor. A diferencia del proceso de estiramiento, la resistencia de todos los sensores disminuye a medida que aumenta la duración de la contracción. Cuando AgNWs &MNs en relación de masa es 5:1, el sensor tiene el coeficiente de sensibilidad más alto durante el proceso de contracción, cuyo GF más alto es 24. Comparando la Fig. 6a-d, menos cantidad de MN conecta las rutas conductoras más fácilmente porque hay más espacio para los materiales que se mueven mientras se contraen, lo cual es contrario a los resultados de la Fig. 5. En consecuencia, el GF del sensor basado en los AgNWs y MNs en una relación de masa de 5:1 es más alto cuando se contraen. Los resultados de la Fig. 6 demuestran que los efectos sinérgicos ocurren cuando AgNW y MN en una proporción mayor.
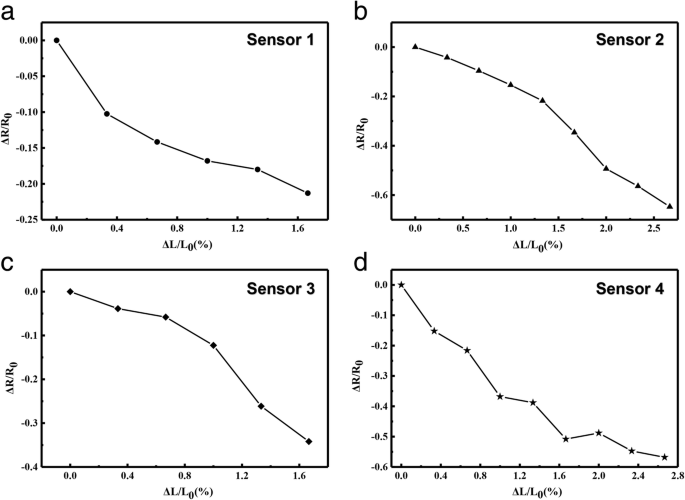
Los cambios de resistencia relativa de los sensores basados en AgNW y MN en una relación de masa de a 1:0, b 5:1, c 2:1 y d 1:1 con contracción
En diferentes campos magnéticos, en la Fig. 7 se muestran diferentes cambios de resistencia del sensor magnético flexible. La resistencia del sensor basado en AgNW es 41,58 Ω. Como se muestra en la Fig. 7a, colocamos el sensor basado en AgNW puros en un campo magnético que aumenta gradualmente, y la resistencia del sensor cambia a medida que vibra en consecuencia. Debido al efecto magnetoestrictivo de los materiales metálicos, la resistencia del sensor cambia ligeramente. La tasa de cambio de resistencia máxima es 0.037 cuando la fuerza del campo magnético es 0.4 T. La resistencia del sensor basada en los AgNW y MN en una relación de masa de 5:1 también disminuye con el aumento de la fuerza del campo magnético como se muestra en la Fig. 7b. En comparación con el sensor sin MN, el cambio de resistencia del sensor basado en AgNW y MN en una relación de masa de 5:1 con cambio de campo magnético es más obvio. Cuando la fuerza del campo magnético es 0.4 T, la tasa máxima de cambio de resistencia es 0.28. En la Fig. 7c, d, la misma aplicación a los sensores basados en los AgNW y MN en una relación de masa de 2:1 y 1:1, y los cambios de resistencia son 0,14 y 0,19 a medida que aumenta el campo magnético, respectivamente. La sensibilidad del sensor basada en los AgNW y MN en una relación de masa de 5:1 es la más alta, y la variación de resistencia continua con el campo magnético se muestra en la Fig. 8. La comparación de los parámetros de los sensores de deformación basada en diferentes relaciones de MN y AgNW se presenta en la Tabla 1.
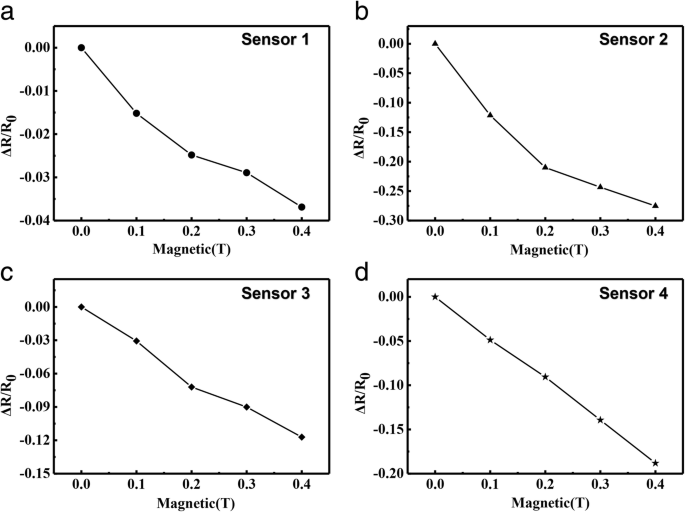
La resistencia cambia en diferentes campos magnéticos
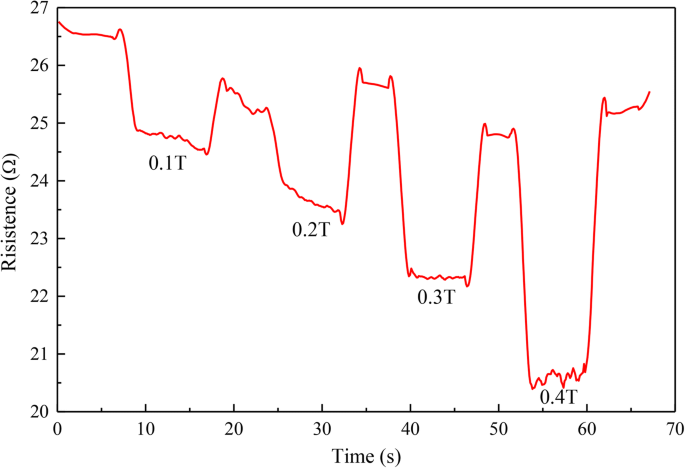
La relación entre la resistencia y los diferentes campos magnéticos
Se puede calcular que la sensibilidad del sensor de campo magnético es 24,14 Ω / T. En conclusión, cuando la relación de masa de MN y AgNW es 1:5, la respuesta del sensor al campo magnético cambiante es más sensible con una sensibilidad de 24,14 Ω / T. El sensor de campo magnético flexible obtenido en este trabajo se puede aplicar además en la detección de la intensidad del campo magnético. Los resultados de la prueba de esta aplicación corresponden al proceso de contracción del sensor cuando se comparan los resultados en las Figs. 7 y 8. Esto significa que los nanomateriales de los sensores se mueven juntos cuando se colocan en un campo magnético. El análisis del mecanismo declara en detalle lo siguiente.
Para comprender las variaciones de resistencia de los sensores durante diferentes intensidades de campo magnético, proponemos un modelo simple para describir el principio de funcionamiento del sensor como se muestra en la Fig. 9. Numerosos AgNW y MN en PDMS forman una red conductora. Las trayectorias conductoras formadas por AgNW y MN sin campo magnético se muestran como líneas rojas en la Fig. 9a. Los MN tienden a estar dispuestos uniformemente bajo el campo magnético, que se muestra en la Fig. 9b. Sin embargo, hay un espacio pequeño para el cambio de posición de los MN, por lo que solo las direcciones de los MN cambian con las líneas del campo magnético. La mayor intensidad del campo magnético representa una fuerza mayor de los MN que puede superar las limitaciones de red de los AgNW. La dirección del movimiento de los MN hace que los Ag NW se reúnan, lo que explica el aumento del número de trayectorias conductoras. Más caminos conductores significan más transferencia de electrones, lo que conduce a una menor resistencia, la resistencia disminuye con el aumento de la intensidad del campo magnético de esta manera.
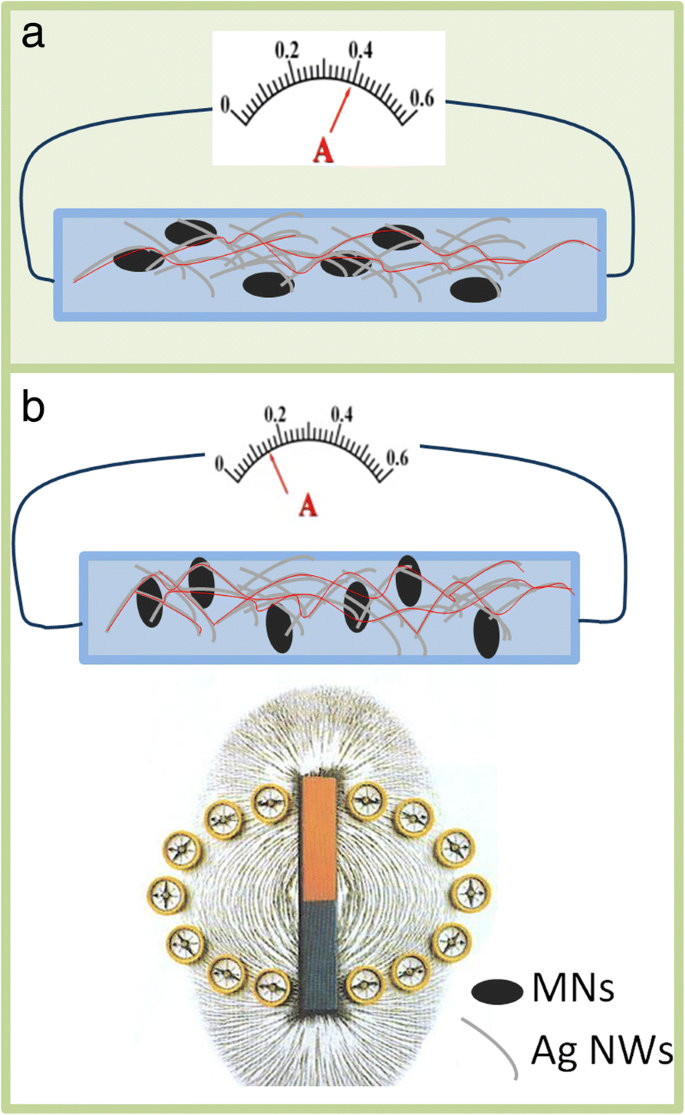
Modelo de detección esquemático de sensor de campo magnético suave basado en AgNW y MNs-PDMS
Conclusiones
El dispositivo diseñado en este documento se ajusta a la tendencia de desarrollo de la electrónica flexible. En este trabajo se estudió un sensor de campo magnético flexible basado en AgNWs y MNs-PDMS con estructura sándwich. Con base en caracterizaciones SEM y XRD, se determinaron los componentes y morfologías de las diferentes proporciones de nanomateriales. Luego, se midieron las curvas de corriente-voltaje y los cambios de resistencia de los sensores basados en AgNW y MN en una relación de masa de 1:0, 5:1, 2:1 y 1:1 con estiramiento y contracción, respectivamente. La interacción entre los AgNW y MN durante la deformación se concluyó a través de los resultados de la caracterización. Luego, se investigaron sensores basados en diferentes proporciones de masa de MN y AgNW para determinar las propiedades de detección del campo magnético. Cuando la relación de masa de AgNW y MN es 5:1, el sensor preparado muestra la sensibilidad más alta de 24,14 Ω / T. Los resultados experimentales muestran que el sensor se encoge con el aumento de la intensidad del campo magnético. Además, se estableció el modelo de detección magnetoestrictivo y piezorresistivo para explorar el mecanismo de este sensor.
Abreviaturas
- AgNWs:
-
Nanocables agrícolas
- GF:
-
Factor de calibre
- MN:
-
Nanopartículas magnéticas
- PDMS:
-
Polidimetilsiloxano
- SEM:
-
Microscopio electrónico de barrido
- XRD:
-
Difracción de rayos X
Nanomateriales
- Electromagnetismo
- Unidades magnéticas de medida
- Campos magnéticos e inductancia
- Compass Sensor - Trabajo y aplicaciones
- Funcionamiento del sensor magnético y sus aplicaciones
- Circuito de ahorro de energía basado en sensor infrarrojo y en funcionamiento
- Fundamentos de los sensores magnéticos digitales
- Proyecto de IoT basado en Raspberry PI que conecta el sensor DHT11
- Nuevo sensor flexible y altamente confiable
- Detección de campos magnéticos
- ¿Qué es el blindaje magnético?