


¿Cuántos ejes necesita su posicionador robótico?
Ha decidido que necesita un posicionador robótico... pero ¿cuántos ejes necesita?
Hay tantos modelos de posicionadores con tantos estilos diferentes. ¡Algunos tienen 1 eje simple pero otros tienen muchos!
Lo que es aún más confuso es el rango de configuraciones que pueden tener los posicionadores. Los ejes se pueden montar vertical, horizontalmente y en cualquier ángulo intermedio.
Elegir un posicionador con demasiados o muy pocos ejes podría significar un presupuesto desperdiciado; ¿¡Pero cuántos son demasiados!?
Si está considerando un posicionador robótico, a estas alturas probablemente ya haya visto varios modelos diferentes. Probablemente haya visto plataformas giratorias de un solo eje, posicionadores de dos ejes y ruedas de la fortuna de varios ejes. Probablemente haya explorado diferentes marcas, estilos y rangos de precios.
A estas alturas, si eres honesto, probablemente estés empezando a cansarte un poco de los posicionadores.
El problema con los posicionadores es que no se trata simplemente de decir “Voy a comprar este” y dejarlo así. El posicionador que elija afectará la facilidad de integración y programación de su celda robótica. No desea elegir el incorrecto y pasar más tiempo del necesario para implementar y programar el robot.
Por ejemplo, si tuviera que obtener un posicionador de 5 ejes con un robot de 6 ejes, ¡eso son 11 ejes que necesita controlar! Si es necesario tener tantos ejes, bien. Pero, si no es necesario, puede arrepentirse de su compra.
¿Por qué "¿Cuántas hachas?" es una pregunta confusa
Preguntar cuántos ejes necesita su mecanismo es una pregunta muy natural. Sin embargo, es una pregunta difícil de responder satisfactoriamente.
Cuando hablamos solo de robots industriales, una respuesta común es decir que se requieren robots de 6 ejes. Esto no siempre es cierto, pero es cierto la mayor parte del tiempo. La razón de esto es que se necesitan 6 ejes para alcanzar puntos en el espacio de trabajo del robot desde cualquier posición y orientación.
Como explicamos en nuestro Euler Angle Primer, la posición del efector final de un robot se controla con 6 parámetros:3 parámetros de traslación (X, Y y Z) y 3 parámetros de rotación (Rot[X], Rot[Y] y Rot [Z]).
Si su robot tiene menos de 6 ejes, estará restringiendo la flexibilidad del robot. Esto tiene sentido para algunos robots, p. robots paletizadores que solo necesitan acercarse a los objetos desde arriba. Sin embargo, en general, los robots industriales de 6 ejes son los más útiles para una amplia gama de tareas.
Sin embargo, más allá de los 6 ejes, su mecanismo se vuelve "redundante".
Por ejemplo, los robots de 7 ejes pueden alcanzar los mismos puntos en su espacio de trabajo que un robot de 6 DoF. Sin embargo, el control de un mecanismo redundante se vuelve más complicado. Como resultado, no desea agregar DoF adicionales si no son necesarios.
Agregar un posicionador significa agregar más DoF al robot. Esto puede conducir o no a un sistema redundante.
Si necesita DoF adicional depende de las necesidades específicas de su tarea.
7 pasos para identificar el número de ejes necesarios para su aplicación
La manera de precisar cuántos ejes necesita es observar más de cerca los requisitos de su aplicación.
Aquí hay un proceso que puede usar para identificar algunos posicionadores potenciales que podrían funcionar para usted. Le permite acercarse a algunos modelos potenciales y evaluarlos adecuadamente. Si ninguna de esas opciones es adecuada, puede alejarse nuevamente y usar la información que ha aprendido para elegir un mejor posicionador.
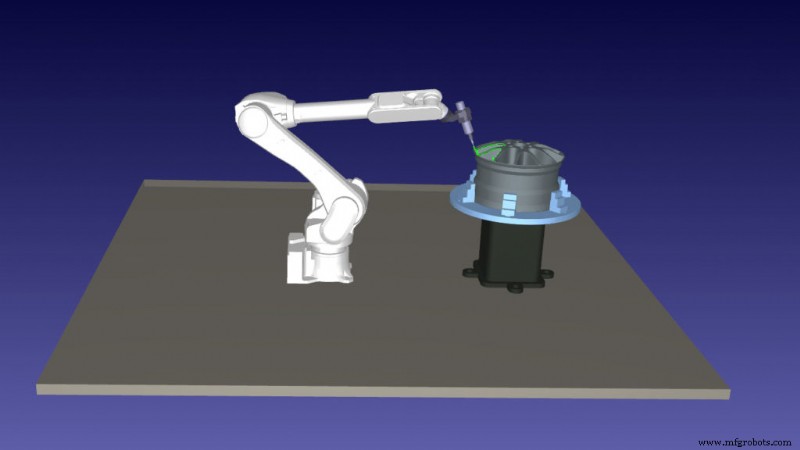
- Observe los requisitos de su tarea, concentrándose particularmente en el espacio de trabajo que se necesita. Una buena manera de hacer esto es construir su aplicación dentro de un simulador de robot.
- Tenga en cuenta qué aspectos de la tarea no son posibles cuando se usa solo el robot. ¿Qué partes del espacio de trabajo son inalcanzables? ¿Qué movimientos son imposibles?
- Con esta información, haga una suposición informada sobre uno o dos tipos de posicionadores que podrían satisfacer sus necesidades. Recuerde tener en cuenta la carga útil que se requiere para sostener sus piezas de trabajo.
- Encuentre algunos posicionadores en el mercado que puedan cumplir con sus criterios y pruébelos en su simulación. Para cada posicionador que pruebe, asegúrese de guardar su configuración como un nuevo proyecto, ya que volverá a uno de los proyectos más adelante.
- Si uno de los modelos funciona perfectamente, ¡genial! Aun así, pruebe algunas opciones para ver qué propiedades son realmente necesarias. Recuerde que no quiere terminar con más DoF de lo que necesita.
- Si ninguno de los modelos funciona para su aplicación, utilice la información que ha recopilado para perfeccionar sus requisitos.
- Vuelva al mercado y busque uno o dos modelos que cumplan con estos nuevos requisitos. Pruebe de nuevo en su simulación antes de hacer su elección.
El uso de un proceso como este elimina algunas de las conjeturas al identificar el número correcto de ejes. Con cada prueba en su simulación, aprende un poco más sobre lo que realmente necesita de un posicionador para completar su tarea.
Toma una decisión y trabaja con ella
Una vez que se haya concentrado en un modelo que funcione para su tarea, puede avanzar y desarrollar la aplicación más a fondo en el simulador.

Abra su proyecto guardado con su posicionador elegido y refínelo en la aplicación completa. Esto le permitirá probar todos los aspectos de la tarea y preparar la aplicación para una fácil integración.
Una vez que haya comprado su posicionador, no necesita preocuparse por si más ejes podrían haber beneficiado la tarea o no. Los robots son muy flexibles y, por lo general, existen múltiples formas de lograr las mismas acciones con un solo robot.
Si encuentra algún problema cuando implementa el robot, es casi seguro que podrá encontrar una solución utilizando el equipo que tiene. Este es el valor de tomar decisiones de compra utilizando un simulador como banco de pruebas.
¿Qué tipo de posicionadores ha estado considerando? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial
- ¿Cómo alcanza un robot la autonomía total?
- ¿Qué precisión debe tener su sistema de seguimiento de activos?
- ¿Cuántas capas y nodos ocultos necesita una red neuronal?
- Documento técnico:Cómo encontrar el potencial de su robot
- Cómo integrar con éxito la robótica en sus instalaciones
- ¿Cuánto cuesta la automatización robótica?
- Centro de soluciones virtuales:¿Cómo ayuda la simulación de robot a la integración del robot?
- ¿Cómo el cuidado de máquinas robóticas ofrece ROI a lo largo del tiempo?
- Cómo promover la seguridad de la soldadura robótica en sus operaciones
- ¿Cómo sé si es hora de comprar un robot?
- ¿Cuántos HP necesita una bomba hidráulica?