


Robótica industrial:tradicional, colaborativa y adaptativa
¿Qué es la robótica industrial?
Todos ellos son mecanismos complejos que permiten automatizar tareas en un entorno industrial. Esto incluye desde brazos robóticos , apiladores, sistemas de 3 ejes, autómatas , etc. Tienen la característica de que deben ser controlados por señales externas y sus movimientos programados antes de poder realizar las tareas asignadas. Estas señales pueden ser desde una señal de inicio de tarea dada por un PLC hasta las coordenadas de movimiento transmitidas por un sistema de visión artificial para realizar la siguiente tarea.
Tipos de robótica industrial y sus diferencias
Los dos tipos de robótica industrial son los robots tradicionales y los robots colaborativos. En los últimos años se ha definido y diferenciado un nuevo tipo de robot industrial. Son robots adaptativos o inteligentes.
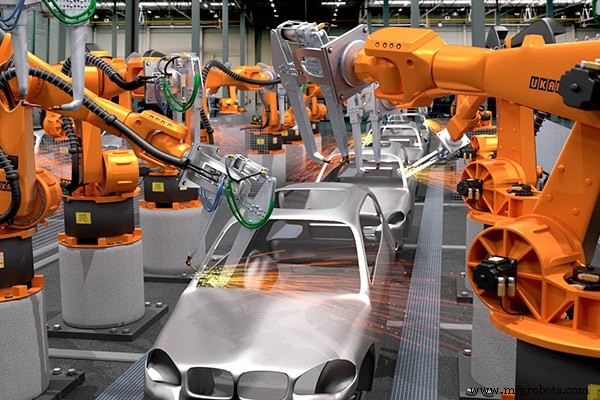
- La característica principal de los robots tradicionales es su necesidad de contar con barreras físicas para su uso seguro.

- En el caso de los robots colaborativos , la característica más representativa es su diseño preparado para poder trabajar en colaboración con el operador humano, sin necesidad de barreras físicas. Una consecuencia negativa de mantener esta forma de operación es la menor velocidad y carga nominal de la robótica colaborativa en comparación con la robótica tradicional.
- Robótica adaptativa o inteligente es una evolución de ambos tipos. Puede tener las fortalezas y debilidades de ambos tipos. Tanto un robot tradicional como un robot colaborativo pueden transformarse en un robot adaptativo o inteligente. La característica principal es su capacidad de reaccionar al entorno y adaptar sus movimientos a la tarea específica que está realizando. Esto es posible gracias a una capa de sensores que dota al robot de “sentidos” y sistemas de Deep learning o machine learning que gestionan la información recibida y controlan los movimientos del robot adaptativo o inteligente.
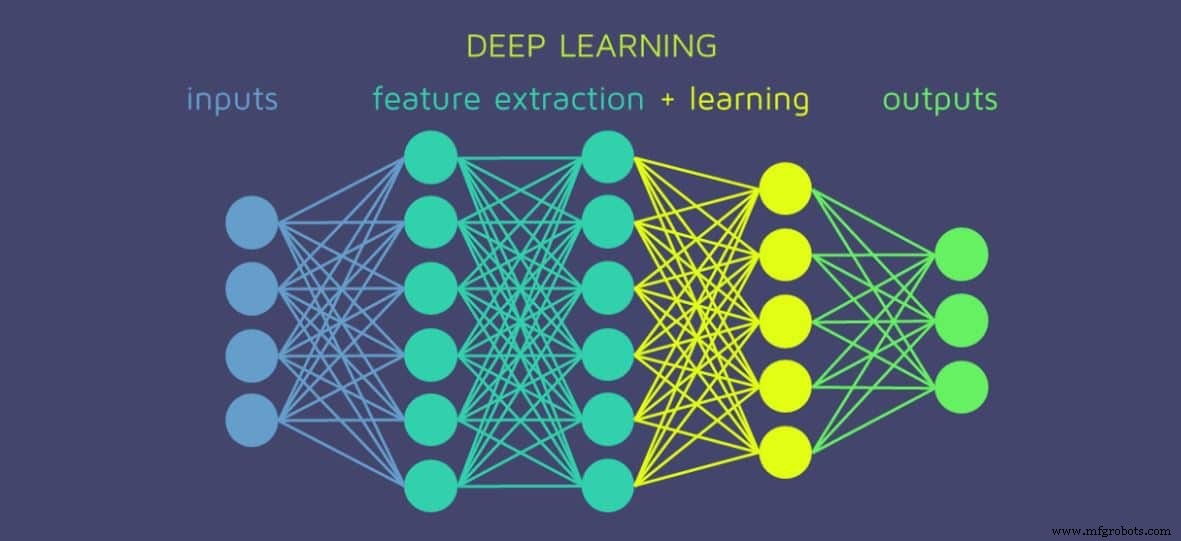
Aprendizaje profundo y redes neuronales en robótica
La contribución de datos por parte de un sistema de sensores a un robot no proporciona por sí misma inteligencia o adaptabilidad al entorno y la tarea que está realizando. Estos datos deben ser procesados y tratados con el fin de definir las acciones adecuadas a llevar a cabo por el robot adaptativo o inteligente. Dependiendo de su complejidad, este procesamiento de datos se puede realizar mediante software tradicional o mediante aprendizaje profundo. sistemas y redes neuronales . El aprendizaje profundo se utiliza en aquellos sistemas donde la toma de decisiones basada en datos de sensores es muy compleja.
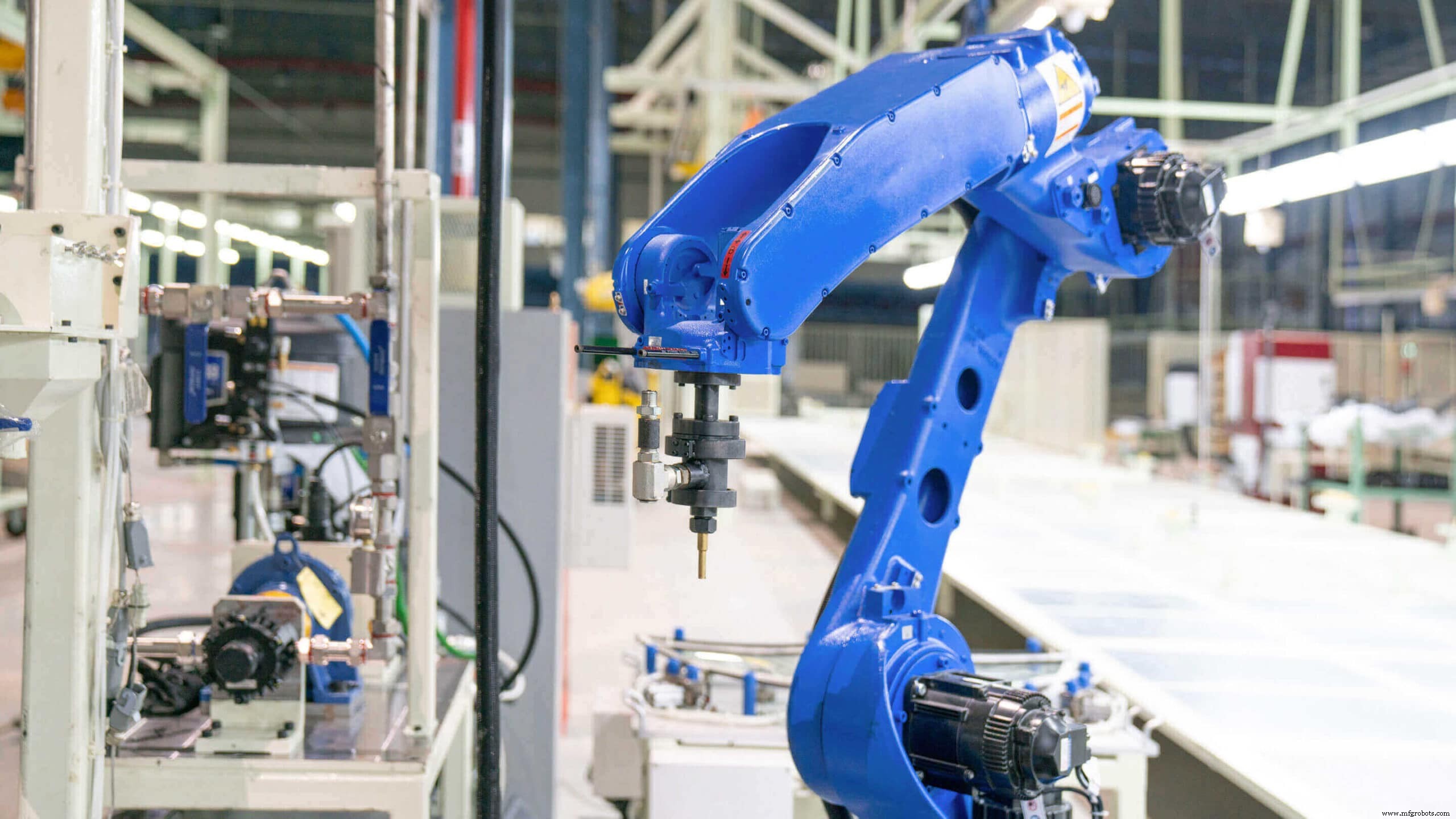
Diseño de garras y herramientas para robótica
Una parte muy importante de los sistemas de robótica industrial es la forma de interactuar con el producto o proceso. El diseño de garras y herramientas es tan importante como la programación y comunicación del robot. Estos sistemas deben garantizar que el robot industrial no dañe el producto y que realicen correctamente su tarea en un proceso industrial. En ocasiones este diseño puede resultar muy complejo, ya sea por la forma del producto a manipular o por la complejidad del proceso.

Aplicaciones, beneficios y ventajas de la robótica adaptativa o inteligente
Las aplicaciones de la robótica industrial son bien conocidas y abarcan temas como:
- Montaje
- Carga y descarga de máquinas. Elegir y colocar
- Empacado y paletizado
- Transporte de piezas, retirada de piezas
- Cortes, esmerilado y pulido
- Procesos de pintura
- Aplicación de adhesivos y selladores
- Soldadura
- Medición y control de calidad
Sin embargo, los procesos más complejos debido a su variabilidad no están automatizados. La creación casi diaria de programas para nuevas variantes o la imposibilidad de garantizar niveles hace que la industrialización a través de la robótica tradicional o colaborativa no sea posible o no sea rentable. Para estos casos, la robótica adaptativa o inteligente ofrece una solución. Su principal ventaja es la adaptación al entorno laboral . En lugar de trabajar con tareas preestablecidas o coordenadas de movimiento, trabaja con puntos flotantes . Estos puntos vienen definidos en cada caso por los sensores que conectamos a la instalación. Los sensores suministran la información que utiliza la unidad de control para definir los puntos flotantes. Esta adaptación al entorno es mayor o menor en función de la capacidad de procesamiento de la unidad de control y de la resolución y calidad de los datos proporcionados por los sensores.
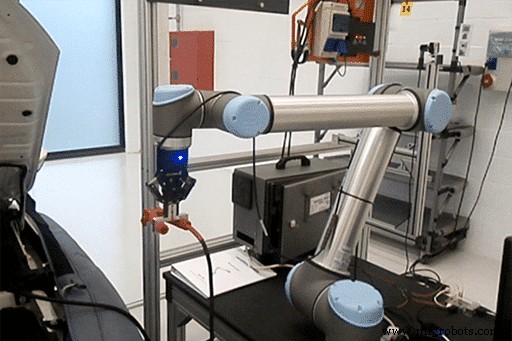
En este Proyecto realizado por ATRIA, se puede conocer un sistema de robótica adaptativa en el que, gracias a una cámara de visión, el sistema es capaz de procesar y seleccionar el punto donde se debe conectar la batería, sin ningún tipo de dimensión fija. Otra ventaja de la robótica adaptativa es que se puede aplicar a instalaciones colaborativas o tradicionales preexistentes con un menor nivel de inversión. Esto se debe a que el hardware se puede aprovechar al máximo en la nueva instalación. Finalmente, otra ventaja de la robótica adaptativa o inteligente es su flexibilidad . Si el entorno o los procesos cambian, el sistema es capaz de adaptarse sin una inversión económica. Las modificaciones a nivel de software o las actualizaciones de sensores pueden ser suficientes para que la instalación de robótica adaptativa o inteligente funcione correctamente.
En este otro Proyecto y además gracias a un sistema de robótica adaptativa, el robot es capaz de decidir cómo tomar la pieza, ya que se reciben en caótica, y cómo se deben colocar en la caja
Pasos para realizar un Proyecto de robótica
Los pasos más habituales que debemos seguir en cualquier proceso de automatización en el que interviene un robot industrial son:
- Definición de requisitos :En este paso se definen las tareas a realizar por el robot industrial junto con las características que debe cumplir. Una buena definición de los requisitos puede ahorrar mucho trabajo posterior y dinero de desarrollo en los próximos pasos.
- Selección de hardware y software :Debe basarse en los datos obtenidos en el paso anterior y en la experiencia del equipo de trabajo. En este paso se define qué tipo de sistema robótico es el más adecuado, un robot tradicional, un robot colaborativo o un robot adaptativo/inteligente.
- Diseño de la instalación utilizando todos los datos definidos y validados por el cliente de los dos pasos anteriores. En el diseño es necesario definir las diferentes fases y partes del proceso, así como los flujos de trabajo y relaciones entre los diferentes elementos.
- Validación de los puntos más críticos detectados durante la fase de diseño . Para ello se pueden realizar prototipos y construcciones parciales de la instalación. Este paso es muy importante en los casos de robótica adaptativa o inteligente. También en aquellas instalaciones donde la variabilidad de piezas o procesos es muy alta.
- Industrialización de la instalación diseñada y validada. En este paso es muy importante definir las pruebas que se utilizarán para validar la instalación.
¿Quieres aplicar la robótica en alguno de tus procesos o productos? ¡Contáctanos!
Publicaciones relacionadas:
- Robótica industrial para las fábricas del mañana
- Robots de inteligencia artificial
- ¿Por qué usar un robot colaborativo?
- Aplicación de Industria 4.0 en diferentes sectores
Proyectos relacionados:
- Conectando baterías con visión artificial
- Recoger y colocar desde cinta con UR y visión
- Sistema de funciones de final de línea con robot colaborativo
- Picking con visión y robot colaborativo de dos brazos
- Pruebas de funciones con MIR+UR a altas temperaturas
Robot industrial
- Robótica industrial:Introducción y guía para principiantes
- Robots colaborativos y su impacto en la fabricación
- Cómo están evolucionando el IIoT y la robótica industrial
- Predecir el futuro de la robótica industrial en 2020 y más allá
- Principales proveedores de robots industriales en el Reino Unido
- Qué industrias y empresas utilizan robots
- Los 10 mejores fabricantes de robots industriales en 2020
- Robots industriales:la guía definitiva
- Robótica en la fabricación de automóviles
- Veo Robotics podría hacer que todos los robots industriales sean colaborativos
- Automatización industrial