


Tercer ojo para los ciegos
Componentes y suministros
 |
| × | 5 | |||
| × | 5 | ||||
| × | 5 | ||||
| × | 5 | ||||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
- La primera tecnología portátil para personas ciegas
- Usar ondas ultrasónicas para detectar los obstáculos
- Notificar al usuario a través de vibraciones / zumbador
El tercer ojo para personas ciegas es una innovación que ayuda a las personas ciegas a navegar con velocidad y confianza al detectar los obstáculos cercanos con la ayuda de ondas ultrasónicas y notificarlos con un timbre o vibración. Solo necesitan usar este dispositivo como banda o tela.
Según la OMS, 39 millones de personas se estiman ciegas en todo el mundo. Sufren muchas dificultades en su vida diaria. Los afectados llevan muchos años utilizando el tradicional bastón blanco que, si bien es efectivo, todavía tiene muchos inconvenientes. Otra forma es tener un animal de compañía como un perro, pero es realmente caro. Por tanto, el objetivo del proyecto es desarrollar una forma económica y más eficiente de ayudar a las personas con discapacidad visual a navegar con mayor comodidad, velocidad y confianza.
Video
Mira el video de su funcionamiento.
Vea el video que apareció en un canal de noticias (idioma malayalam)
Novedad del proyecto: Esta es la primera tecnología portátil para personas ciegas que resuelve todos los problemas de las tecnologías existentes. Hoy en día hay tantos instrumentos y dispositivos inteligentes para la navegación de personas con discapacidad visual, pero la mayoría de ellos tienen ciertos problemas de transporte y el principal inconveniente es que necesitan mucha formación para su uso. Una de las principales peculiaridades de esta innovación es que es asequible para todos, el costo total es de menos de $ 25 (~ 1500INR). No existen dispositivos de este tipo disponibles en el mercado que se puedan usar como una tela y que tengan un costo y una simplicidad tan bajos. Cuando se usa a gran escala, con mejoras en el prototipo, beneficiará drásticamente a la comunidad.
Paso 1:sistemas existentes

- Bastón blanco
- Perro mascota
- Dispositivos inteligentes (p. ej., visión de una linterna para persianas)
Problema de los sistemas existentes:
- Bastón blanco:puede agrietarse / romperse fácilmente. El palo puede atascarse en las grietas del pavimento de diferentes objetos.
- Perro mascota:costo enorme. (~ $ 42,000 / 280000Rs)
- Desventajas comunes (incluidos los dispositivos inteligentes) No se puede transportar fácilmente, necesita mucha formación para su uso
Las funciones del tercer ojo para ciegos personas: Al usar este dispositivo, pueden evitar por completo el uso de bastón blanco y otros dispositivos similares. Este dispositivo ayudará a los ciegos a navegar sin tener que sujetar un palo, lo que les resulta un poco molesto. Simplemente pueden usarlo como una banda o tela y puede funcionar con mucha precisión y solo necesitan un poco de capacitación para usarlo.
Paso 2:descripción completa del proyecto
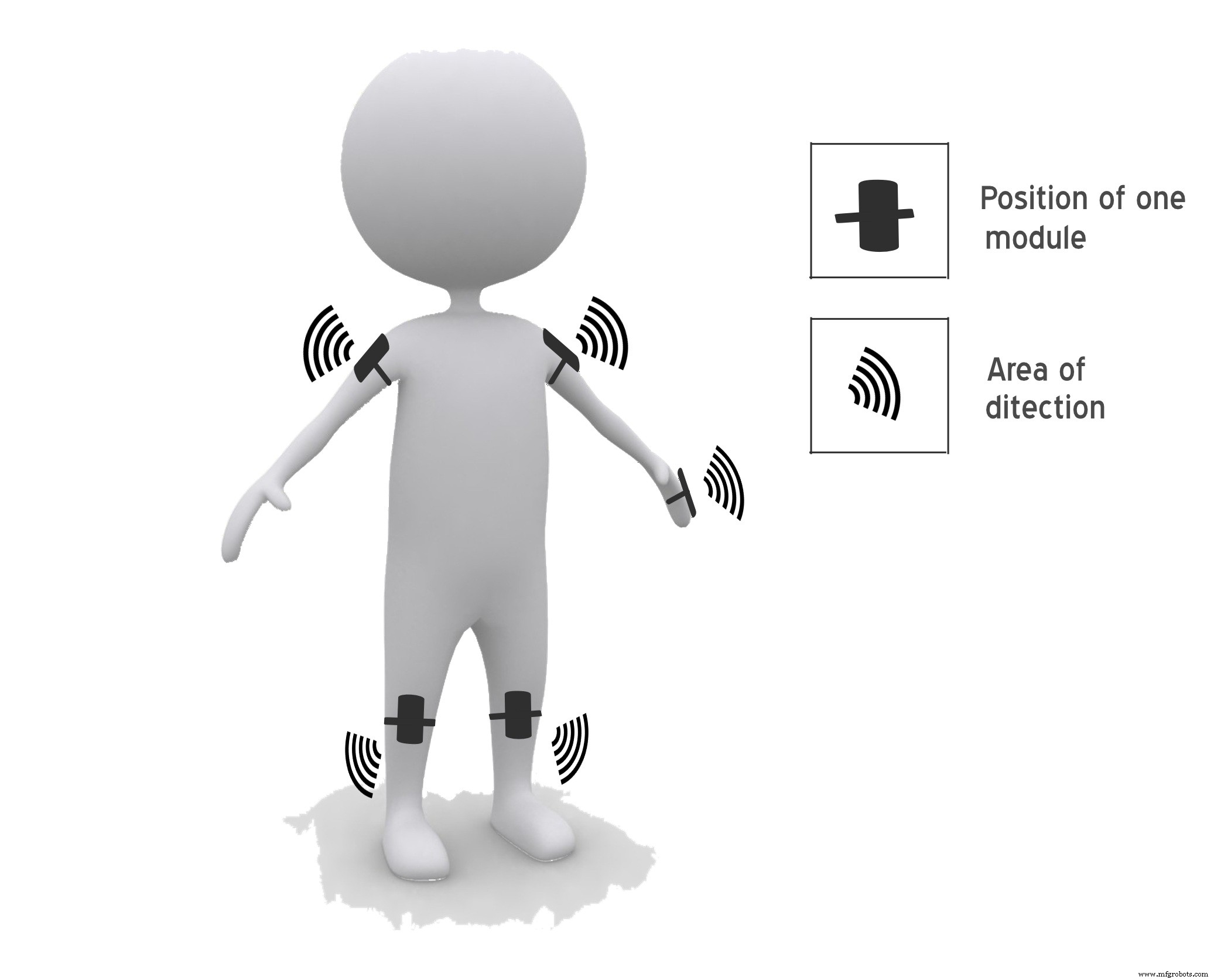
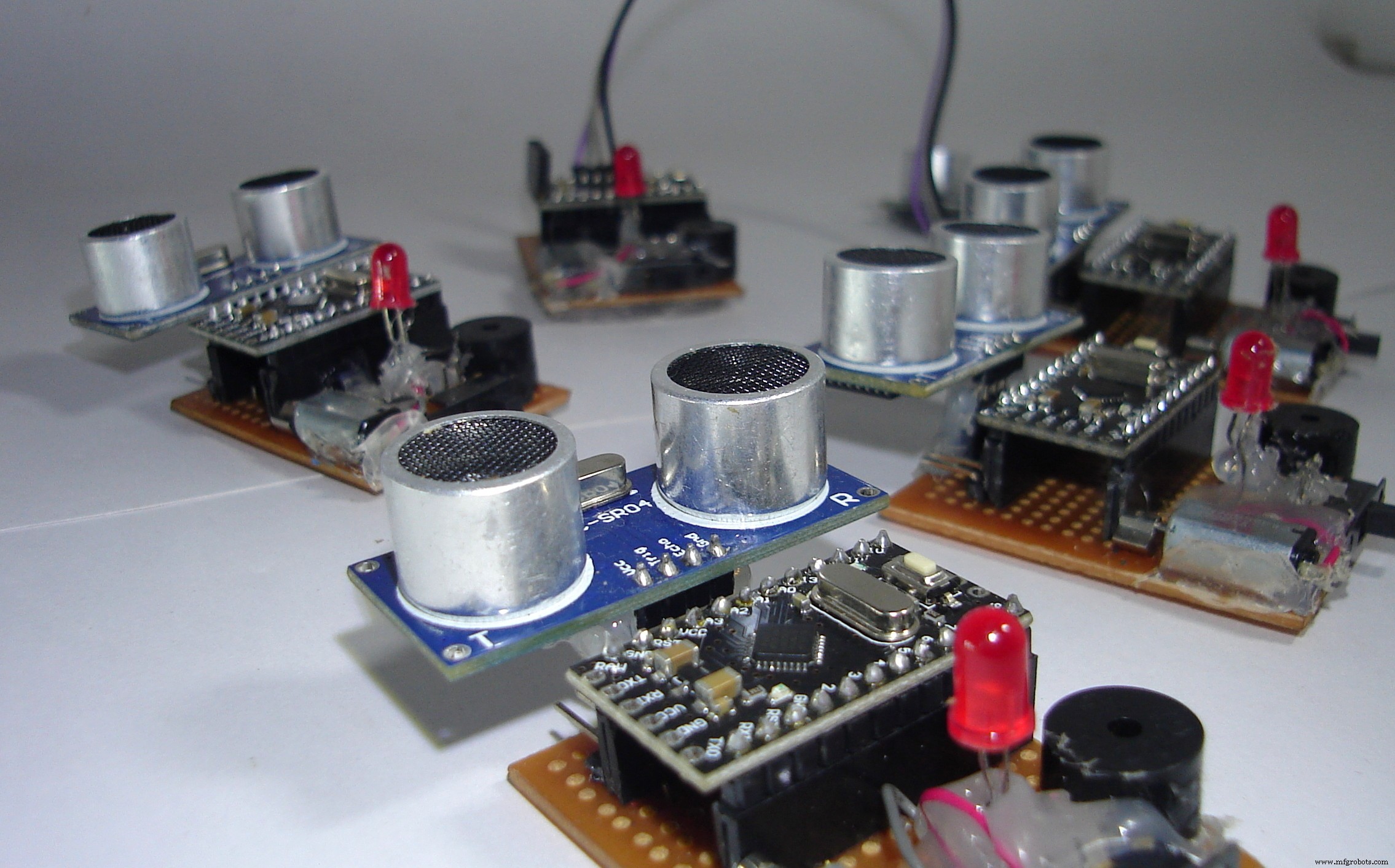
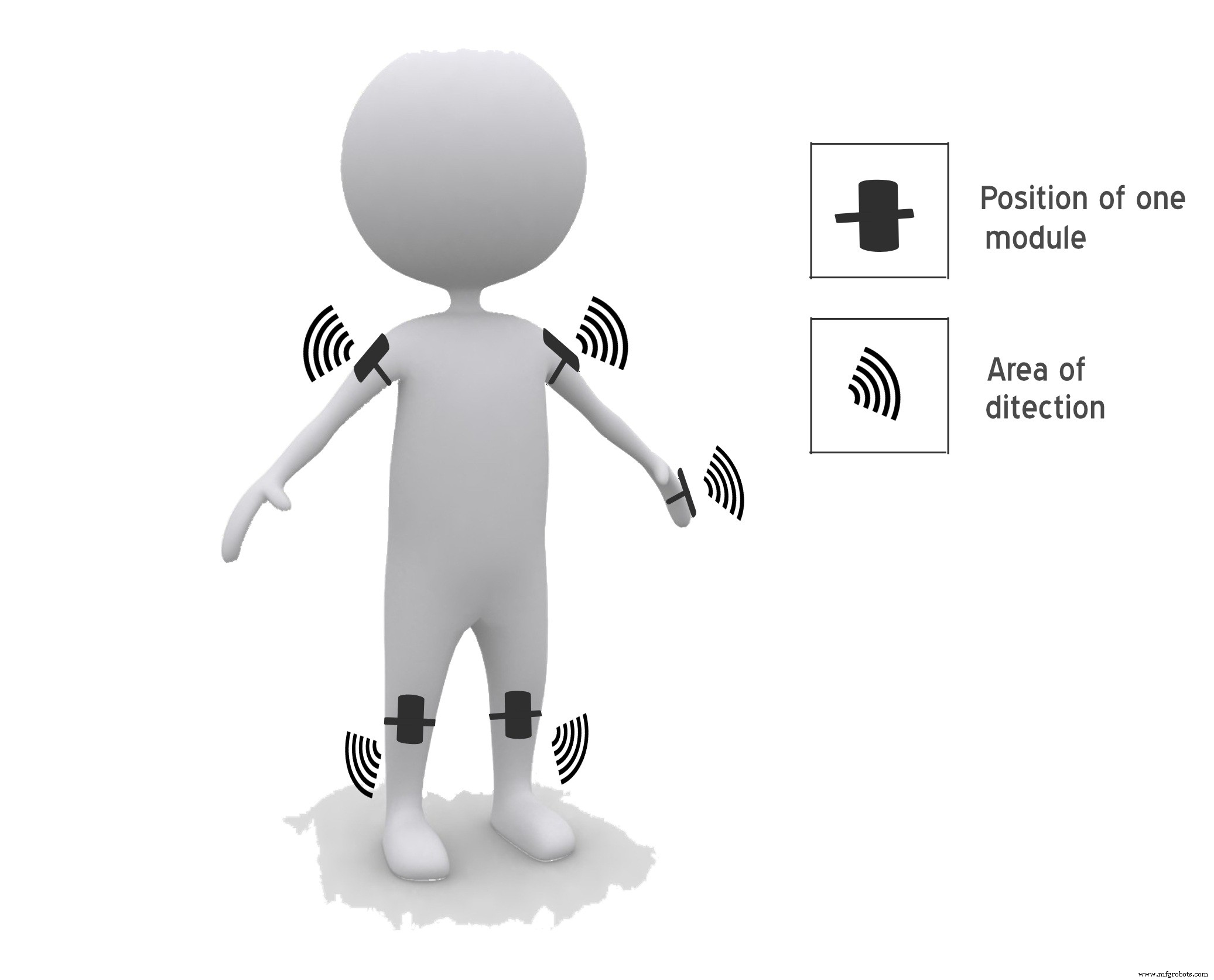
He diseñado un dispositivo portátil especial basado en la placa Arduino que se puede usar como un paño para persianas. Este dispositivo está equipado con cinco sensores ultrasónicos, que consta de cinco módulos que están conectados a las diferentes partes del cuerpo. Entre ellos, dos para ambos hombros, otros dos para ambas rodillas y uno para la mano. Con los cinco sensores ultrasónicos, las personas ciegas pueden detectar los objetos en una vista de cinco dimensiones a su alrededor y pueden viajar fácilmente a cualquier lugar. Cuando el sensor ultrasónico detecta un obstáculo, el dispositivo notificará al usuario mediante vibraciones y pitidos. La intensidad de la vibración y la frecuencia de los pitidos aumentan con la disminución de la distancia y este es un dispositivo completamente automatizado.
Mejoras en las funciones:
Todo el proyecto se puede realizar en forma de chaqueta, por lo que no es necesario llevar el dispositivo uno por uno. El uso de placas especialmente diseñadas en lugar de arduino y sensores ultrasónicos de alta calidad hace que la respuesta sea más rápida, lo que hace que el dispositivo sea capaz de trabajar en lugares abarrotados.
Paso 3:probado con éxito con la ayuda de una persona con discapacidad visual.

Lea más sobre esto aquí en el Publicación de Facebook de nuestro profesor de ciencias de la escuela.
Premios ganados por esta innovación.
- 1er premio para el premio a la innovación PPT
- Segundo premio en la feria de ciencias a nivel estatal. (Realizado por el gobierno de Kerala)
Paso 4:Creación de un prototipo de la idea:piezas utilizadas
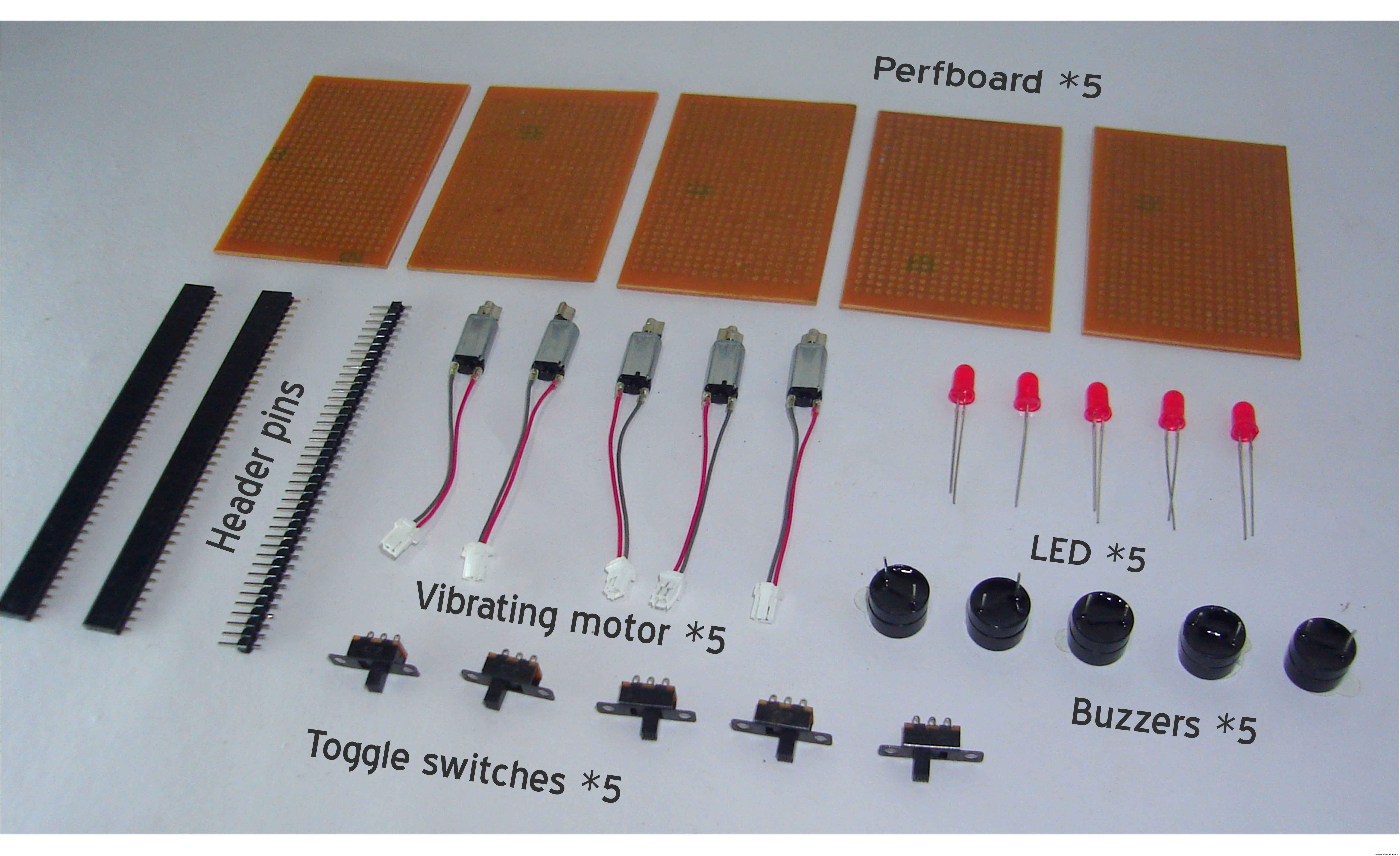

Materiales
- 5 x Arduino pro mini
- 5 x sensor ultrasónico
- 5 x tablero de preferencias
- 5 x motor vibrante
- 5 x timbres
- 5 x LED rojos
- 5 x interruptores
- Pines de cabecera masculinos y femeninos
- 4 x cable de puente
- Un banco de energía
- Una batería móvil vieja de 3,3 voltios
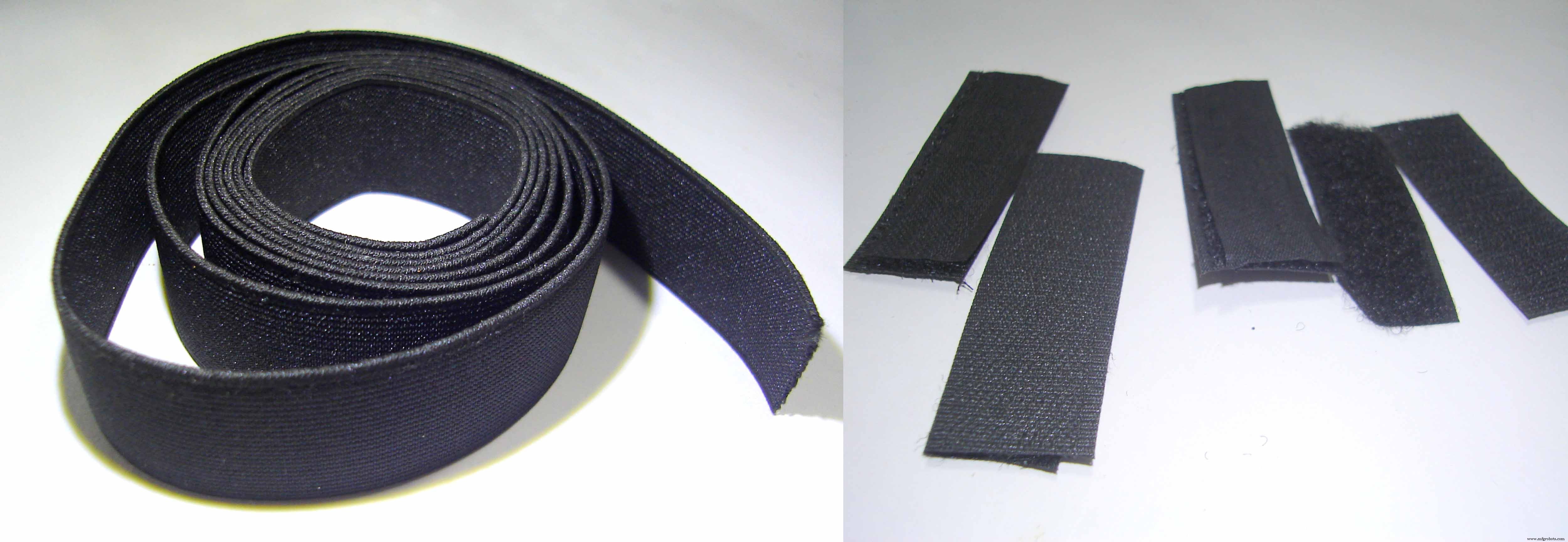
- Algunos elásticos y pegatinas (para que sea una banda para usar)
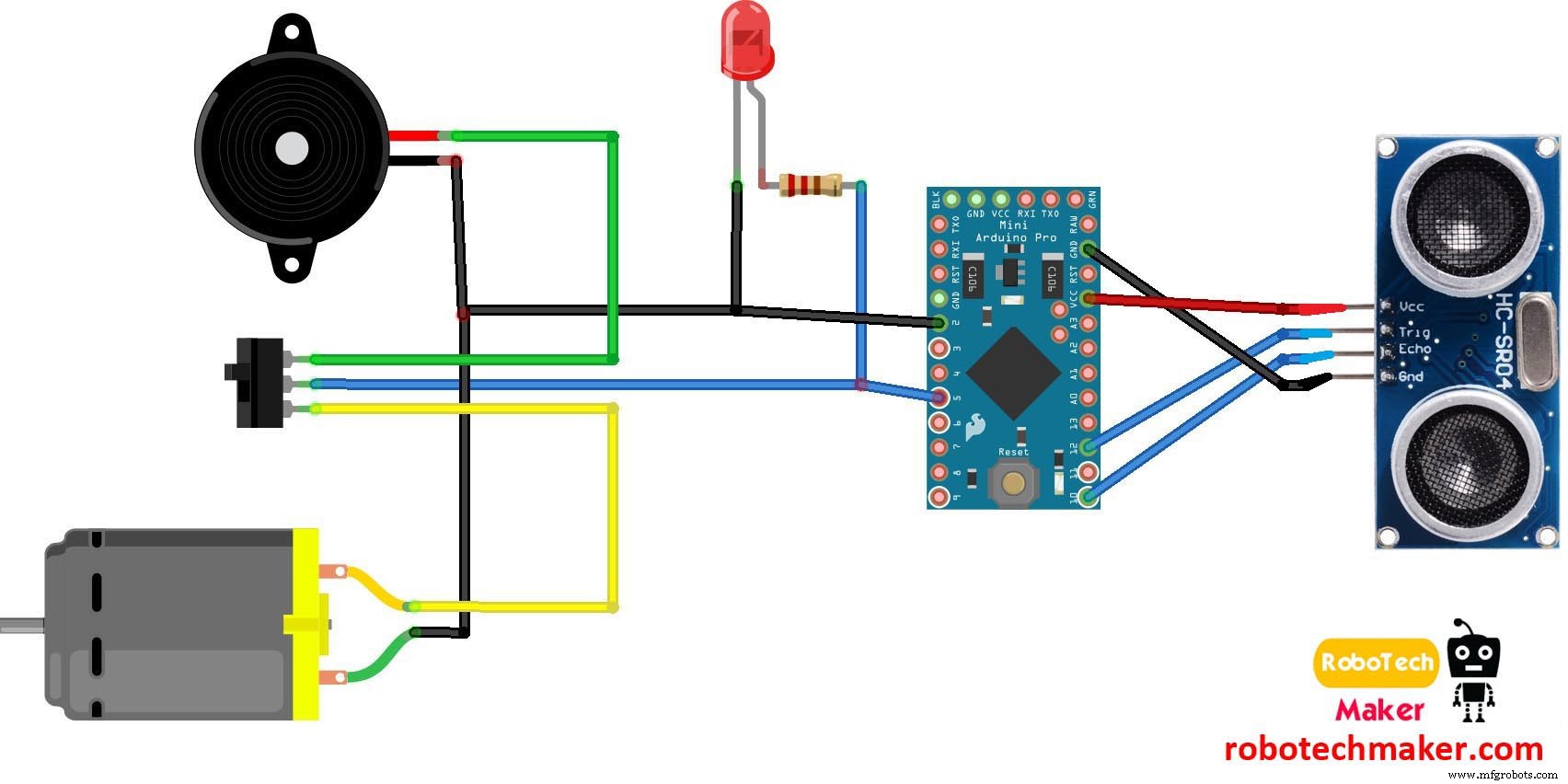
Paso 5:diagrama de circuito
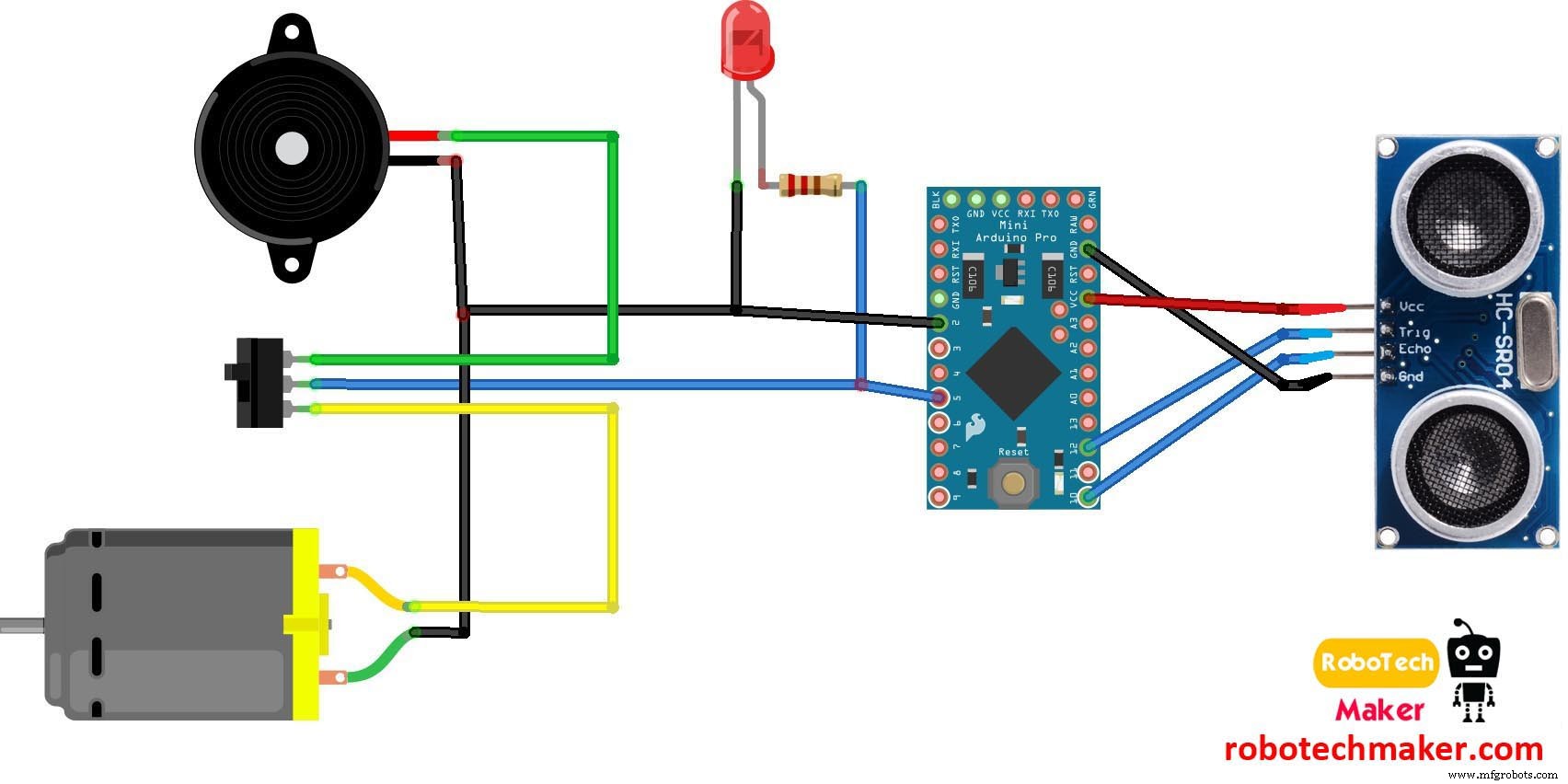
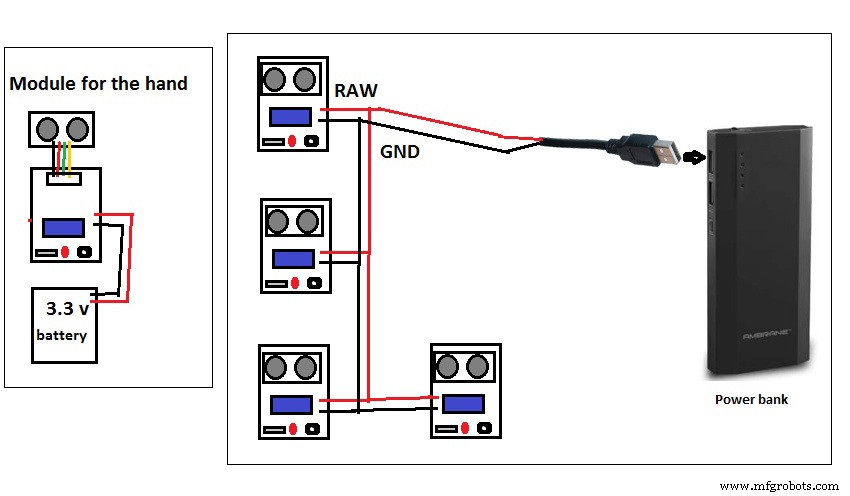
Instrucciones de cableado.
- Tierra de LED, zumbador y motor de vibración a GND de arduino
- + ve del LED y la pata central del interruptor al pin 5 de Arduino
- + ve de Buzzer a la primera etapa del cambio
- + ve del motor de vibración a la tercera pata del interruptor
- Sensor ultrasónico
- Pin VCC del sensor ultrasónico - Pin VCC de Arduino
- Pin del sensor ultrasónico GND - Pin de Arduino GND
- Disparo de clavija del sensor ultrasónico:clavija 12 de Arduino
- Pin del sensor ultrasónico Echo - Arduino PIN 12
El interruptor que se usa aquí es para seleccionar el modo. (modo de timbre o vibración)
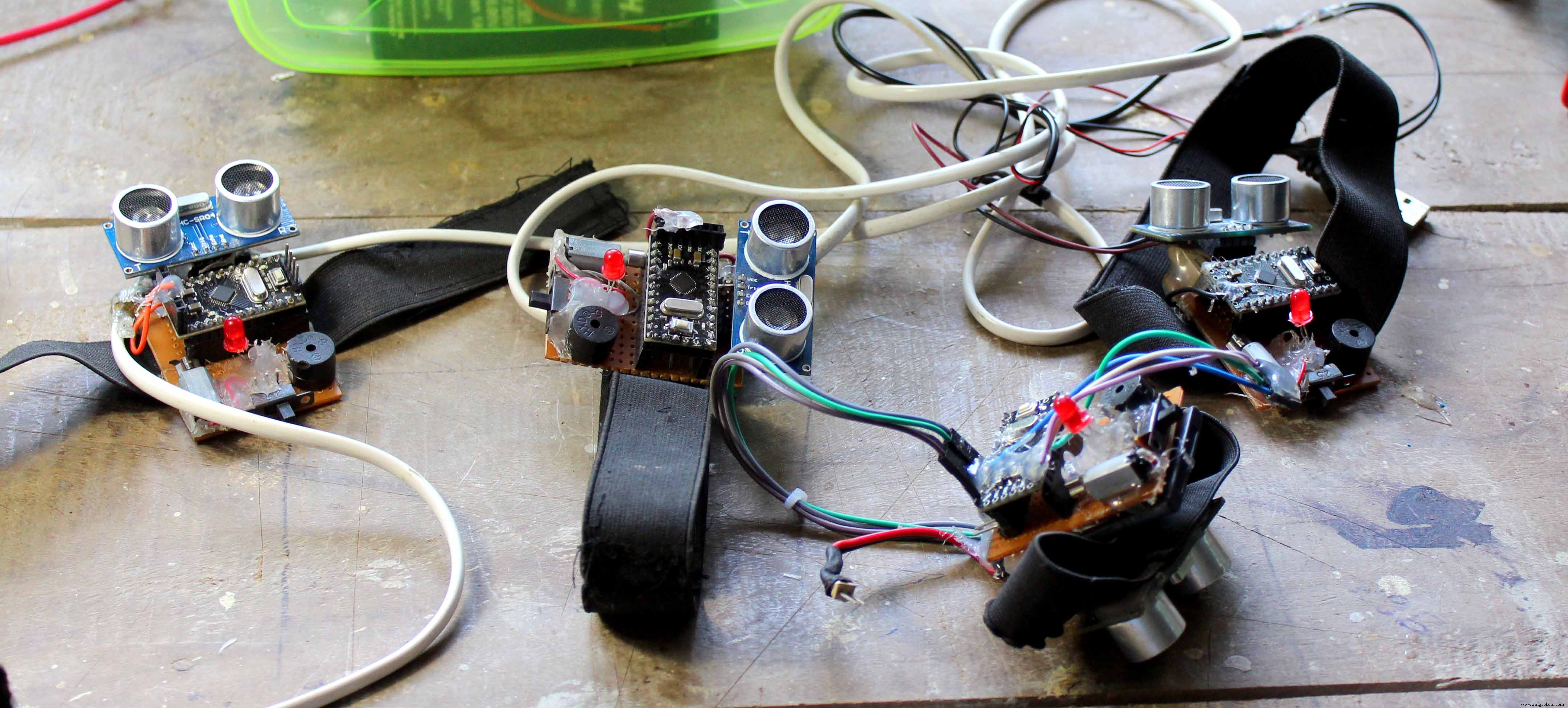
Figura 2 - Encendido de los módulos - Conecte el 4 arduino pro mini a un pin macho USB y conéctelo a un banco de energía. Para el módulo en la mano use una pequeña batería de litio.
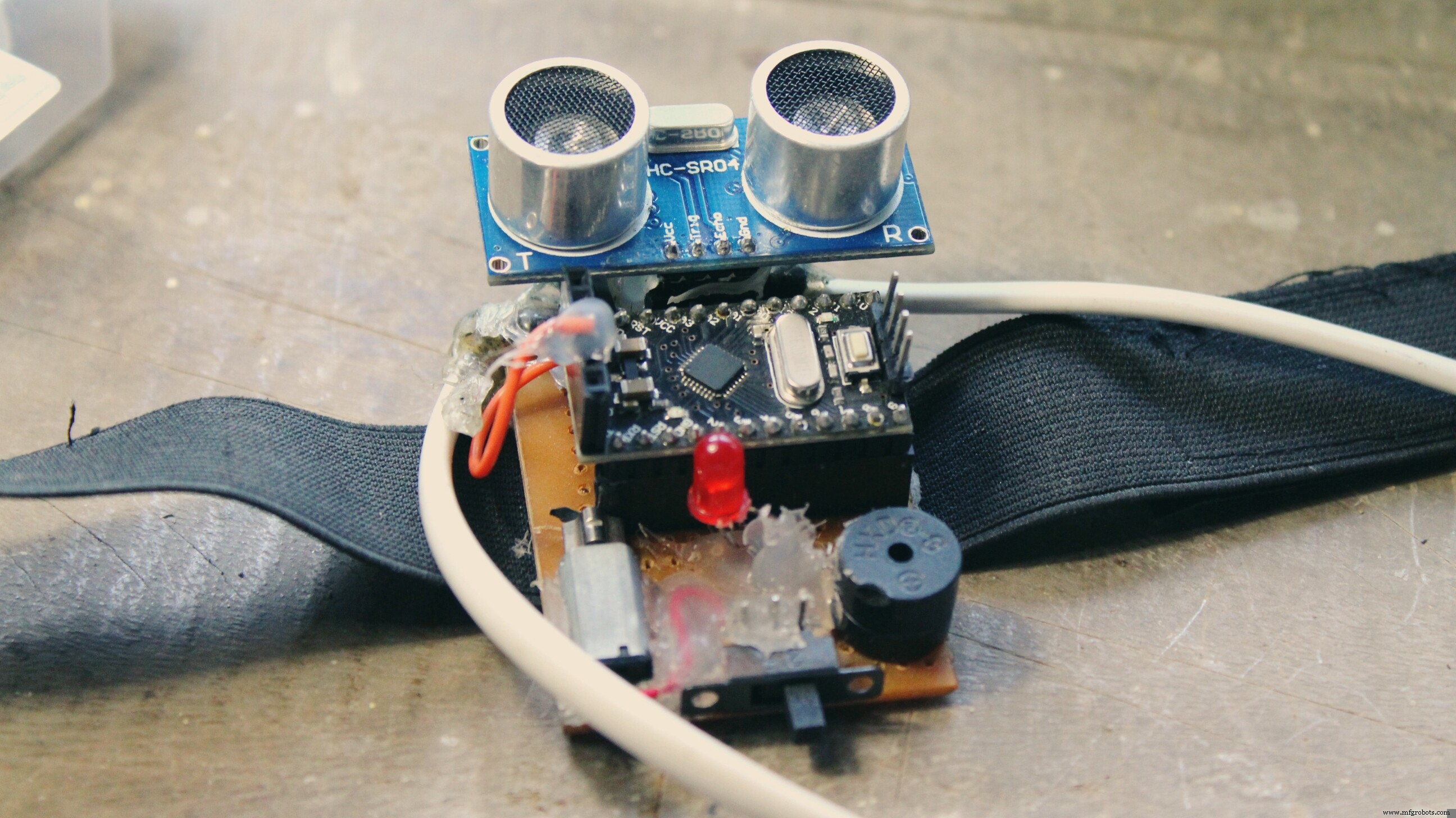
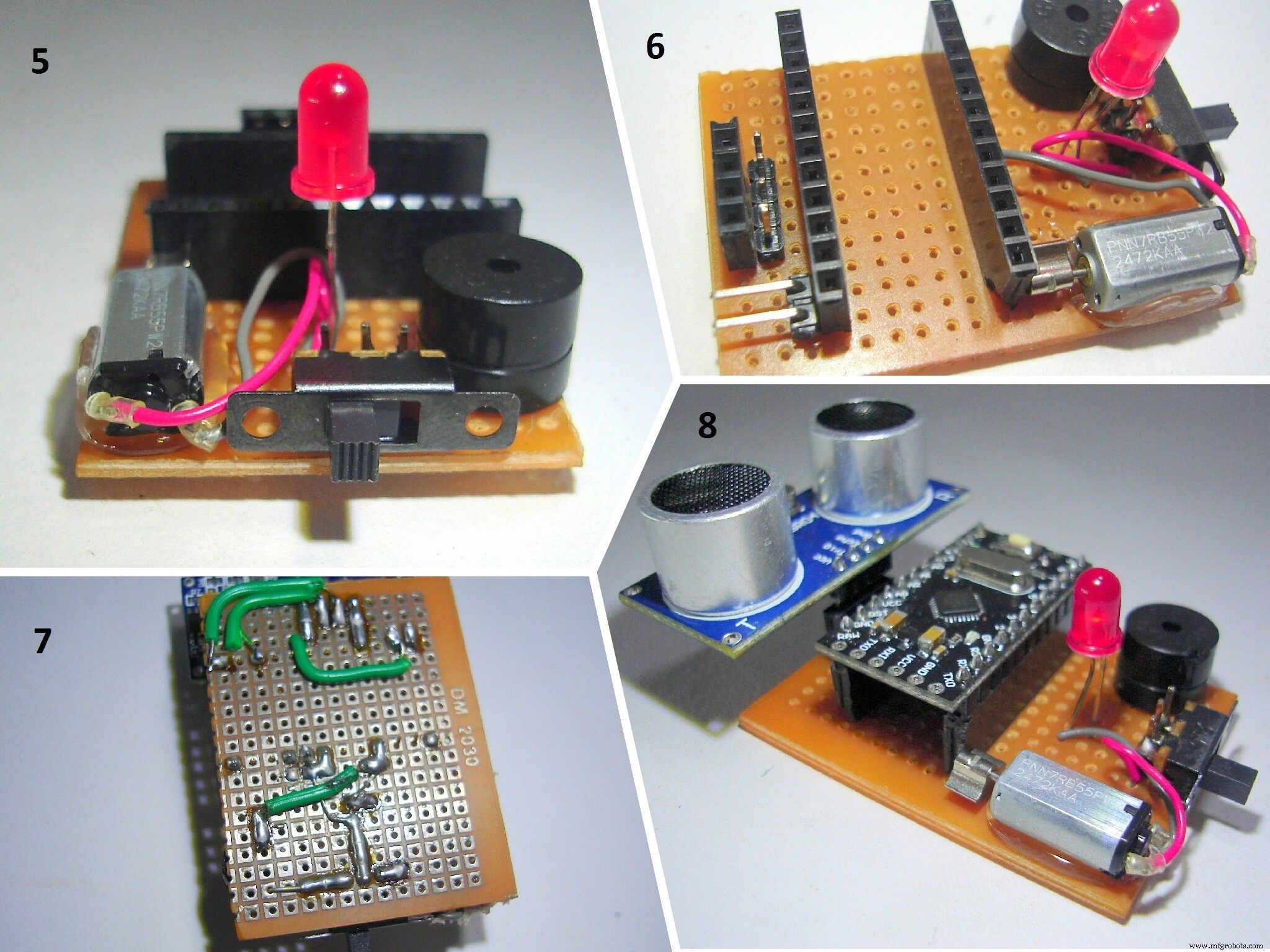
Paso 6:creación de los módulos
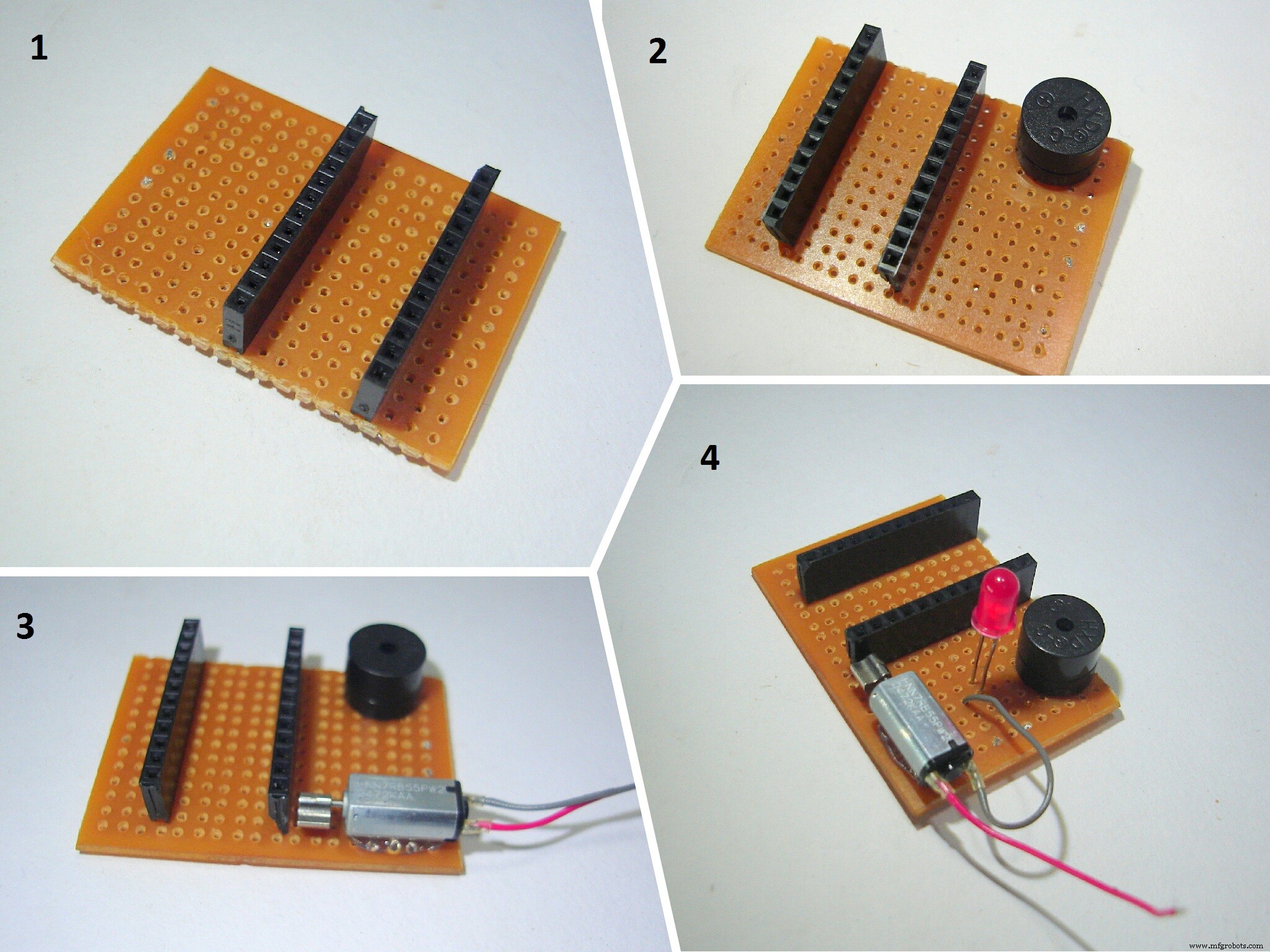
- Primero corte la placa pref en una dimensión de 5 x 3 cm y suelde los conectores hembra para Arduino a la placa.
- Luego suelde el timbre.
- Luego, conecte el motor vibratorio con la pistola de pegamento y suelde los cables.
- Luego, conecte el LED.
- Luego, conecte el interruptor.
- Luego, conecte los pines del cabezal para los sensores ultrasónicos y para la entrada de la batería.
- Luego suelde todo como se muestra en el diagrama del circuito.
- Ahora conecte el Arduino y el sensor ultrasónico a la placa
También conecte la banda elástica a todos los módulos.
Se deben hacer 3 módulos más de la misma manera que describimos anteriormente, pero para el que está en la mano, hay una pequeña diferencia. visite el siguiente paso antes de realizar el último módulo.
Paso 7:Código + Creación del módulo para la mano
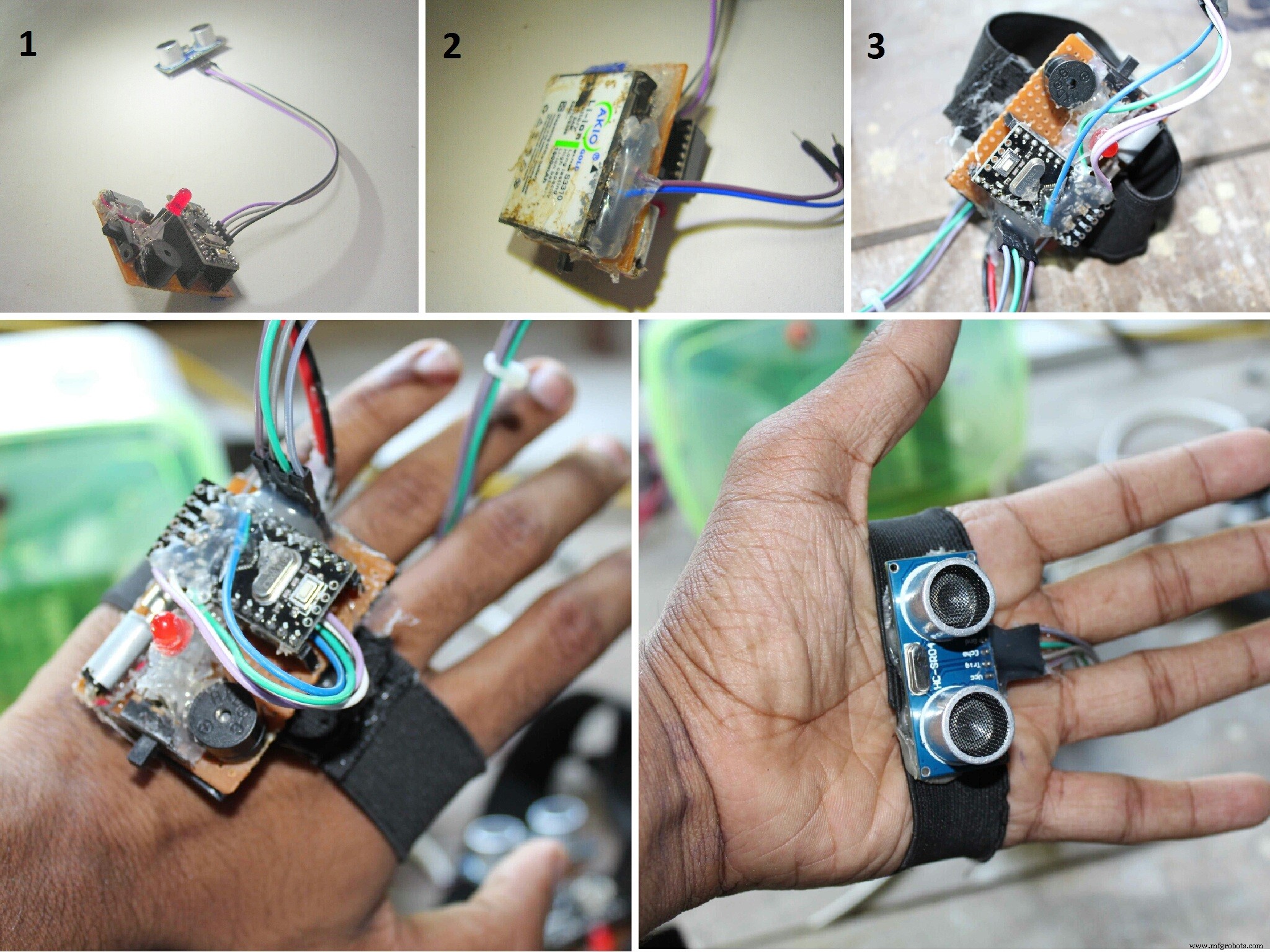
- Conecte el sensor ultrasónico a la placa usando 4 cables de puente.
- Luego, conecte una batería móvil de 3.7 voltios a este módulo.
- Luego, conecte la banda elástica como se muestra en la figura.
Por último, cargue el código en cada placa Arduino y encienda los otros 4 módulos usando un banco de energía.
Código utilizado en Arduino:
// VISITA:www.robotechmaker.com const int pingTrigPin =12; // Activador conectado al PIN 7 const int pingEchoPin =10; // Eco conectado yo PIN 8 int buz =5; // Zumbador al PIN 4 void setup () {Serial.begin (9600); pinMode (buz, SALIDA); } bucle vacío () {duración larga, cm; pinMode (pingTrigPin, SALIDA); digitalWrite (pingTrigPin, BAJO); delayMicroseconds (2); digitalWrite (pingTrigPin, ALTO); delayMicroseconds (5); digitalWrite (pingTrigPin, BAJO); pinMode (pingEchoPin, ENTRADA); duración =pulseIn (pingEchoPin, HIGH); cm =microsegundos a centímetros (duración); si (cm <=50 &&cm> 0) {int d =mapa (cm, 1, 100, 20, 2000); escritura digital (buz, ALTA); retraso (100); digitalWrite (buz, BAJO); retraso (d); } Serial.print (cm); Serial.print ("cm"); Serial.println (); retraso (100); } microsegundos largos a centímetros (microsegundos largos) {devuelve microsegundos / 29/2; } Third_eye_for_blinds.ino
Código
- Código utilizado en arduino
Código utilizado en arduino C / C ++
// VISITA:www.robotechmaker.com const int pingTrigPin =12; // Activador conectado al PIN 7 const int pingEchoPin =10; // Eco conectado yo PIN 8 int buz =5; // Zumbador al PIN 4 void setup () {Serial.begin (9600); pinMode (buz, SALIDA); } bucle vacío () {duración larga, cm; pinMode (pingTrigPin, SALIDA); digitalWrite (pingTrigPin, BAJO); delayMicroseconds (2); digitalWrite (pingTrigPin, ALTO); delayMicroseconds (5); digitalWrite (pingTrigPin, BAJO); pinMode (pingEchoPin, ENTRADA); duración =pulseIn (pingEchoPin, HIGH); cm =microsegundos a centímetros (duración); si (cm <=50 &&cm> 0) {int d =mapa (cm, 1, 100, 20, 2000); escritura digital (buz, ALTA); retraso (100); digitalWrite (buz, BAJO); retraso (d); } Serial.print (cm); Serial.print ("cm"); Serial.println (); retraso (100); } microsegundos largos a centímetros (microsegundos largos) {devuelve microsegundos / 29/2; } Esquemas
Proceso de manufactura
- Componentes para actualizaciones de software basadas en la nube en IoT
- Los mejores accesorios para tu Raspberry Pi
- VISTA:Para ciegos
- Sujetadores de plástico de Craftech utilizados en productos para ciegos
- Componentes de plástico:allanando el camino para la eficiencia automotriz
- Sensor de temperatura múltiple
- Control de cautín de bricolaje para 862D +
- MotionSense
- CoroFence - Detector térmico🖖
- ¡Gracias por los recuerdos!
- Materiales para componentes de Invar 36